Використання радіолокатора для розбіжності. Зразковий алгоритм дій з розрахунку маневрування при роботі з маневреним планшетом Маневрений планшет як правильно виміряти швидкість
Тип документу: Методичний посібник | doc.
Популярність: 0.23%
Сторінок: 16.
Мова: Російський український.
Рік видання: 2005.
Методичні вказівки та завдання на Виконання контрольної роботи з дисциплін "Тренажер РЛС и ЗАРП" для студентів 4-го курсу заочної форми навчання Спеціальність 7.100301 "Судноводіння"
Кожен студент згідно свого варіанту виконує 5 завдань на бланках маневреного планшета і відповідає на 2 питання на окремому аркуші. Бланки маневрених планшетів з вирішеними завданнями і лист з відповідями підшиваються в окрему папку.
Варіант контрольної роботи вибирається по останній цифрі особистого шифру.
Варіант №№ завдань №№ питань
1 1, 11, 21, 31, 41 1, 11
2 2, 12, 22, 32, 42 2, 12
3 3, 13, 23, 33, 43 3, 13
4 4, 14, 24, 34, 44 4, 14
5 5, 15, 25, 35, 45 5, 15
6 6, 16, 26, 36, 46 6, 16
7 7, 17, 27, 37, 47 7, 17
8 8, 18, 28, 38, 48 8,18
9 9, 19, 29, 39, 49 9, 19
10 10, 20, 30, 40, 50 10, 20
Для грамотного виконання контрольної роботи необхідно вивчити Правила №№ 5, 6, 7, 8, 9, 10 МППСС-72, а також короткі методичні вказівки по графічному рішенню завдань на маневреному планшеті.
На титульному аркуші папки контрольної роботи вказати прізвище, ім'я, по батькові студента, номер особового шифру, найменування дисципліни, курс, номер варіанта, спеціальність.
Виконана робота у встановлений термін передається для перевірки викладачеві.
До заліку допускається студент, який виконав контрольну і лабораторні роботи.
Короткі методичні вказівки по графічному рішенню завдань на маневреному планшеті.
Порядок вирішення завдання розбіжності з одним судном
на маневреному планшеті
(Див. Додатки 1, 2)
Умови обмеженої видимості є особливими умовами плавання, тому дисципліни «Радіолокаційний тренажер» і «Тренажер САРП» припускають перш за все плавання в цих умовах.
При плаванні при обмеженій видимості в відкритому морі огляд навколишнього оточення за допомогою РЛС проводиться переважно на шкалах масштабу 12-16 миль, а ця дистанція є ймовірною дальністю виявлення більшості судів.
Хороша морська практика для вирішення завдання розбіжності з судами у відкритому морі рекомендує розділити екран РЛС на три зони:
1) зона оцінки ситуації від 12 до 8 миль, де визначаються ступінь небезпеки зіткнення, пара-метри руху зустрічних суден і програється маневр розхожі-дення;
2) зона маневрування від 8 до 4 миль. Дії для розбіжності рекомендується приймати якомога швидше після встановлення небезпеки зіткнення;
3) зона надмірного зближення від 4-х миль. До входу луна-сигналу судна в цю зону маневр розбіжності у відкритому морі повинен бути завершений, щоб при зміні ситуації в результаті невірних маневрів судів було час і простір для усунення небезпеки зіткнення.
При плаванні в умовах обмеженої видимості привілейованих судів немає і на кожне судно з РЛС покладається обов'язок щодо попередження зіткнення, причому рекомендується дотримуватися такого пріоритет маневрів:
1. поворот вправо;
2. зменшення швидкості;
3. зупинка судна;
4. поворот вліво.
Основним допущенням при вирішенні задачі розбіжності на маневреному планшеті (ситуаційному планшеті) і з використанням САРП є незмінність параметрів руху (курсів і швидкостей) власного судна та інших судів на період набору інформації і рішення задачі.
Момент початку вирішення завдання - момент початку розбіжності, «нульова точка» цей час зняття першого відліку пеленга і дистанції до першої мети.
Час повернення до первинних параметрах руху власного судна це момент закінчення розбіжності.
При включенні РЛС необхідно провести правильну регулювання яскравості і посилення приймача, а в разі необхідності зменшити впливу перешкод від хвилювання і атмосферних опадів.
Порядок вирішення завдання розбіжності на маневреному планшеті:
1) З центру планшета провести вектор переміщення власного судна за 6 хвилин, Vн.
2) Зробити записи в таблиці обробки радіолокаційної інформації про курс (Кн) і швидкості (V н) власного судна.
3) З центру планшета радіусом Дзад. провести окружність. Рекомендується при обмеженій видимості приймати в умовах відкритого моря Дзад. \u003d 1,5 ÷ 2 милі, а в обмежених водах Дзад. \u003d 0,5 милі.
4) Спостерігаючи за ситуацією на екрані РЛС вибрати зі зміни відносних полярних координат (? П ≈ 0 і ΔД 5) З екрана РЛС зняти відліки пеленга і відстані луна-сигналу небезпечного судна, запустити секундомір, помітити суднове час, зробити записи в таблицю обробки радіолокаційної інформації для нульової точки про час 0 ا, пеленг і дистанції для судна А.
6) За цими даними нанести на маневрений планшет початкову ситуацію, позначивши нульову точку цифрою 0 ا і великою літерою А.
7) Використовуючи паралельну лінійку направити (увіткнути) вектор переміщення власного судна за 6 хвилин Vн в нульову точку і його початок позначити буквою F (Fixed), вектор позначити буквою V н.
8) Провести частину окружності в районі нульової точки, вправо і вліво від неї (або коло) радіусом Vн з центру F, що дозволить прискорити графічне рішення задачі.
9) На 6-й хвилині зняти відліки пеленга і відстані луна-сигналу того ж судна А і записати їх в таблицю обробки радіолокаційної інформації.
10) За отриманими даними нанести на маневрений планшет 6-ти хвилинну точку, позначивши її цифрою 6 ا.
11) З'єднати нульову і 6-ти хвилинну точки прямої для визначення вектора відносного переміщення мети за 6 хвилин. Стрілка вектора спрямована в 6-ти хвилинну точку. Позначимо цей вектор Vо.
12) Продовжити вектор Vо до центру планшета, отримаємо ЛОДА - траєкторію, по якій буде переміщатися луна-сигнал судна А при незмінності курсів і швидкостей власного і зустрічного судів.
13) З центру планшета на ЛОДА опустити перпендикуляр і зняти значення Дкр.
14) Визначити графічним вектором Vо від нульової точки до підстави перпендикуляра лінії Дкр час найкоротшого зближення суден tкр.
15) Отримані значення Дкр і tкр записати на маневреному планшеті.
16) З'єднати точку F з 6-ти хвилинної точкою прямої, отримаємо 6-ти хвилинний вектор мети Vц, спрямований в 6-ти хвилинну точку, позначити його Vц.
17) Використовуючи паралельну лінійку і вимірювач визначити істинні курс і швидкість судна-цілі А, зробити записи на маневреному планшеті;
18) Нанести попередження точку (рекомендується 12-ти хвилинну з урахуванням часу набору інформації (tн.і. \u003d 6 хв., Рішення задачі tр.з. \u003d 3 хв. І виконання маневру tм \u003d 3 хв) і провести з неї пунктирними лініями дотичні до кола радіуса Дзад. Отримаємо ОЛОДи, за якими повинні переміщатися луна-сигнали судна при виконанні маневру. при одвороті вправо ОЛОД пройде зліва від судна і навпаки.
19) З 6-ти хвилинної точки провести лінії паралельні ОЛОДам в протилежному напрямку для визначення сектора небезпечних курсів (СОК), за межі якого потрібно вивести кінець вектора V н для вирішення завдання розбіжності. Якщо точка F знаходиться в межах СОК, вирішити задачу розбіжності зменшенням швидкості неможливо.
20) Вибрати ефективний маневр розбіжності на безпечній відстані, причому зміна курсу і / або швидкості повинно бути достатньо великим, щоб він був замічений зустрічним судном. Маневр одвороту, в загальному випадку вправо, повинен бути не менше ніж на кут 30-45º, а зменшення швидкості повинно бути не менше, ніж на половину.
Комбінований маневр зміною курсу і швидкості на практиці застосовується рідко через погіршення керованості судна при зниженні швидкості.
Згідно з вимогами Правила 19 МППСС-72 «... наскільки це можливо слід уникати:
- зміни курсу ліворуч, якщо інше судно знаходиться попереду траверзу і не є обганяє;
- зміни курсу в бік судна, що знаходиться на траверзі або позаду траверзу »;
- а також слід брати до уваги обмеження РЛС, через які луна-сигнал судна зліва може на дисплеї не спостерігатися.
Метод графічної прокладки
Графічна прокладка дає більш точну інформацію про ситуацію судів і виконується на маневреному планшеті М-78 (рис 212)
Завдання на розбіжність складається з: 1) нанесення початкової ситуації на планшет і побудови трикутників швидкостей векторів відносної швидкості;
2) оцінки ситуації небезпечного зближення (зіткнення) з судами, луна-сигнали яких спостерігаються на екрані РЛС, шляхом розрахунку часу найкоротшого зближення / кр, перетину / "єр, дистанції найкоротшого зближення DKр і виявлення їх реальної і потенційної небезпеки;
3) вибору і обгрунтування маневру, виділення судів, з якими необхідно розходитися;
4) розрахунку обраного маневру за допомогою графічного перестроювання векторних трикутників початкової ситуації;
5) розрахунку моменту початку маневру (з урахуванням маневрених елементів
Судна), вибирається попередження час (3 або 6 хв), дистанція розбіжності, час розбіжності і дистанція відходу від свого початкового курсу за час маневрування;
6) нанесення очікуваної лінії відносного руху (ОЛОД) і подальший контроль за переміщенням судна-цілі (спостережуваного судна).
Розглянемо детально процес вирішення завдання на розбіжність з допомогою графічної (радіолокаційної) прокладки на маневреному планшеті.
1. Для зручності розрахунків інтервал часу приймає 3 або 6 хв, т е. 1/20 або 1/10 ч.
2. Будуємо на планшеті з його центру вектор курсу і швидкості VL нашого судна.
![]()
Мал. 213. Рішення завдання на розбіжність з допомогою графічної прокладки
![]()
Рис 214 Визначення потенційної небезпеки і розташування судна, для розбіжності з яким потрібно провести розрахунок маневру
3. З появою на екрані РЛС ехосигналів визначаємо їх пеленги і дистанції і наносимо на планшет.
4. Через рівні інтервали часу (3 або 6 хв) в колишній последовательности наносимо наступні точки і після їх з'єднання отримаємо вектори відносної швидкості.
5. При цих векторах будуємо векторні трикутники, для чого Vc свого судна з центру планшета переносимо в першу точку L Поєднавши початок свого вектора Vc з другою точкою 2, отримаємо вектор швидкості спостережуваного судна W
6. Лінію, що з'єднує точки 1 і 2, продовжимо за центр планшета, отримаємо ЛОД.
Оцінка ситуації полягає у визначенні ступеня небезпеки зіткнення судів. Знаходимо найкоротша відстань DKp, опускаючи перпендикуляр з центру планшета до ЛОД і точку перетину курсу судна-цілі Dnep, для чого проводимо з центру планшета лінію, паралельну вектору швидкості У "судна-цілі до перетину з ЛОД
Виявлення потенційної швидкості судів можна здійснити двома способами:
1) програємо маневр нашого судна (Vc) або судна-цілі (V ") і визначаємо по зміні ЛОД і Vo можливий перехід з потенційної небезпеки в реальну. Зміна курсу, швидкості або комбінований маневр нашого судна вправо погіршує ситуацію з судном" б ". В даному випадку маневр необхідний з судном "б" (рис. 214);
2) використанням особливостей переміщення луна-сигналів у відносному русі на екрані РЛС, що було детально розібрано при візуальному методі оцінки ситуації.
Для вибору і обгрунтування виду маневру програють всі можливі його варіанти: зміна курсу, швидкості або того й іншого одночасно При цьому враховуються всі фактори, супутні плавання в умовах обмеженої видимості, навігаційних особливостей району плавання, МППСС-72 і маневрених можливостей свого судна і можливого маневру судна-цілі. Судоводитель повинен прагнути до безпечного розбіжності прийнятним варіантом Розрахунок маневру можна проводити за допомогою палетки і лінійки. Він зводить до мінімуму графічну роботу по одному-двом судам. На рис. 215 виконаний розрахунок маневру для безпечного розходження зміною свого курсу вправо. Положення упереджених точок не впливає на методику розрахунку з використанням векторних трикутників початкової ситуації. Слід завжди пам'ятати, що момент випередження точки є умовний момент закінчення маневру.
Момент початку маневру свого судна розраховується з урахуванням маневрених елементів судна (інерція, гальмування, повороткість і т. Д.).
![]()
Мал. 215 Розрахунок маневру для розбіжності зміною курсу вправо; розрахунок виконаний з судном "б"
У векторному трикутнику судна "а" вектор нашої швидкості повертаємо вправо на розрахований кут. Отримуємо новий вектор відносної швидкості Vo і з'єднуємо точку _2 з кінцем повернутого вектора Vq. Паралельно вектору відносної швидкості V "o з попередженням точки проводимо ОЛОД судна" а ". Попередженням точка береться за один і той же інтервал часу. Після цього можна визначити час розходження суден tpicx і дистанцію відходу D0тх від курсу нашої судна (див. Рис. 215 ).
Для розрахунку використовуємо новий вектор відносної швидкості W Дистанція відходу розраховується на планшеті. Для цього на лінії нашого нового курсу, прокладеного з центру планшета, відкладаємо відстань, яке пройде наше судно за час розбіжності. Потім з отриманої точки опускаємо перпендикуляр на лінію початкового курсу. Відрізок цього перпендикуляра буде дистанцією відходу від курсу в масштабі планшета.
Результат маневрування контролюється за допомогою ОЛОД. На планшет наноситься не тільки ОЛОД судна, щодо якого розрахований маневр, але і інших судів, які становлять потенційну небезпеку. Ці лінії очікуваного відносного руху проводяться для контролю за економікою, що розвивається ситуацією після маневру, щоб своєчасно виявити маневр інших судів, а також в разі допущених помилок в розрахунках і графічних побудовах.
З вищевикладеного бачимо, що обидва методи взаємопов'язані і доповнюють один одного, забезпечують вирішення завдань на безпечне розходження суден з допомогою РЛС в умовах обмеженої видимості.
На деяких судах над екраном РЛС встановлений дзеркальний планшет. Це допоміжний пристрій, що є беспаралаксной оптичною системою. Перевага дзеркального планшета в тому, що він дає можливість вести графічну прокладку, не перериваючи спостереження на екрані РЛС.
Періодично підвищуючи кваліфікацію, судноводії морського флоту проходять тренувальні навчання по вирішенню завдань на радіолокаційних тренажерах.
Зважаючи на неможливість узгоджених дій кораблів (суден) в умовах обмеженої видимості правила розбіжності даються в МППСС не в категоричній формі, а у вигляді рекомендацій. Відповідно до Правила 19 п. Судно, яке виявило за допомогою радіолокатора інше судно, повинно перш за все визначити, чи існує небезпека зіткнення. «Якщо є сумніви щодо наявності небезпеки зіткнення, то слід вважати, що вона існує» (Правило 7 п. «А»).
Вибір маневру для уникнення надмірного зближення залежить від ситуації. Маневр може передбачати зміну курсу, швидкості, а також того й іншого одночасно. Зміна курсу і швидкості повинно бути значним. Невеликі послідовні зміни курсу і швидкості створюють труднощі в тлумаченні радіолокаційної інформації на зустрічному судні. Під зміною швидкості слід розуміти її зменшення або зупинку машин, так як збільшення швидкості в умовах обмеженої видимості суперечить Правилам.
Таблиця 18.2. Тактико-технічні дані деяких навігаційних РЛС

Маневр тільки зміною курсу є ефективним, якщо зміна курсу проводиться завчасно, коли є достатня водний простір і коли цей маневр не викликає надмірного зближення з іншими суднами. Вибір боку зміни курсу надається командиру корабля, однак Правила рекомендують уникати:
Зміни курсу вліво при знаходженні іншого судна попереду траверзу, якщо це судно не є обганяє;
Зміни курсу в бік судна, що знаходиться на траверзі або позаду траверзу.
Аналіз обстановки і визначення елементів руху цілі (ЕДЦ)
Аналіз обстановки з застосуванням маневреного планшета проводиться таким чином (рис. 18.1):Місце свого корабля До вважають в центрі планшета;
За пеленгам і дистанцій, виміряним радіолокатором через 1-2 хв, наносять на планшет не менше двох місць мети;
Через отримані точки М1, М2, М3 проводять лінію відносного руху ЛОД1;
З центру планшета на ЛОД1 опускають перпендикуляр КС1, довжина якого є найкоротшим відстанню розбіжності з метою DKV.
Якщо DKp більше Dоз, загрозу надмірного (небезпечного) зближення немає. Подальших розрахунків і маневрів не буде потрібно до тих пір, поки мета не змінить курс або швидкість.
Якщо DKp менше Dоз, проводиться визначення ЕДЦ:
З точки До відкладають вектор швидкості свого корабля VK;

Мал. 18.1. Аналіз обстановки, визначення ЕДЦ і розрахунок маневру розбіжності з одиночної метою на маневреному планшеті
- з кінця вектора VK проводять лінію, паралельну ЛОД1 На цій лінії відкладають вектор відносної швидкості Vр величину якого розраховують за формулою

- з'єднавши точку К з кінцем вектора Vр отримують вектор швидкості VM;
Час зближення з метою на найкоротшу відстань

Для аналізу обстановки і визначення ЕДЦ на маневреному планшеті за допомогою картосчіслітельной приставки «Пальма» виконують такі дії:
Маневрений планшет кладуть на стіл і узгоджують масштаб нерухомих кіл дальності (НКД) з колами планшета;
На кіл планшета підписують дистанції і вимикають НКД;
Проводять лінію курсу корабля на планшеті (вважаючи свій корабель в центрі) і поєднують його з відміткою курсу зображення;
Закріплюють планшет і наносять на нього початкові місця можна побачити цілей;
Через 1-2 хв наносять на планшет не менше двох-трьох місць кожної мети;
Проводять лінії відносного руху кожної мети.
По розташуванню ЛОД і величиною DKp виявляють цілі, з якими можливо надмірне зближення. Подальшу обробку інформації для розрахунку ЕДЦ можна виробляти, як зазначено вище. Для прискорення отримання ЕДЦ благається застосовувати наступний прийом:
Планшет з нанесеними місцями цілей зрушують назад за курсом на величину пройденого кораблем за час спостережень відстані;
Наносять нові позначки цілей, зрушуючи кожного разу планшет назад за курсом на величину пройденої відстані;
Поєднавши прямий місця цілей, отримують направлення вектора істинної швидкості кожної з них, спрямованої від попередніх точок до наступним;
Величину векторів істинної швидкості розраховують, як зазвичай, через пройдену відстань і час спостережень.
Зазначений спосіб менш точний, ніж попередній, але дозволяє швидше оцінити обстановку при зустрічі з декількома судами.
При наявності в РЛС режиму істинного руху є можливість безпосередньо з індикатора отримувати ЕДЦ і швидко виявляти їх зміна. Однак на індикаторі, що працює в режимі істинного руху, визначення DKp і Tкр утруднено, тому для точного визначення цих величин необхідно переходити на режим відносного руху.
Визначення ЕДЦ на картах великого масштабу (1:50 000; 1:25 000) виробляється в складних в навігаційному відношенні районах, де розрахунок маневру розбіжності тільки на планшеті може привести до вибору небезпечного курсу. В цьому випадку штурман має можливість вести прокладку за себе і за мету в абсолютному русі без відриву від навігаційної обстановки. У разі застосування автопрокладчіка з'являється можливість мати поточні координати свого корабля для ведення прокладки за кілька цілей і наочно спостерігати ситуацію.
Основні недоліки способу: неможливість швидко визначити небезпеку зіткнення; найкоротша відстань до цілі DKp безпосередньо з прокладки отримати не можна; на карті можна нанести тільки точку перетину справжніх курсів. Тому одночасно з прокладкою в абсолютному русі аналіз обстановки і розрахунки на розбіжність рекомендується проводити на маневреному планшеті за допомогою приставки «Пальма» з перевіркою розбіжності на карті.
Розрахунок і контроль маневру розбіжності з одиночної метою на маневреному планшеті
При наявності загрози надмірного зближення, т. Е. Коли Dkp менше Dоз, необхідно так змінити курс або швидкість свого корабля, щоб ЛОД мети пройшла від центру планшета (точки К) на відстані більше D03. Для розрахунку маневру на планшеті виробляють такі дії (рис. 18.1):Розраховують і наносять на ЛОД1 попередження позицію цілі Vц; величина М3Мц \u003d Vрtц, де t ц \u003d 2-4 хв, в залежності від натренованості оператора;
З точки Мц проводять дотичну до кола планшета, відповідної заданому відстані D03 і борту розбіжності; отримують нову лінію відносного руху цілі ЛОД2;
Будують два нових швидкісних трикутника, для чого з кінця вектора Vм проводять в зворотному напрямку лінію, паралельну ЛОД2 (на рис. 18.1 показана пунктиром), до перетину з колом планшета, відповідної VK;
З отриманих двох векторів КК "і КК" вибирають той, при якому вектор відносної швидкості Vp буде більше по абсолютній величині і курс КК "швидше призведе до розбіжності з метою.
Аналогічно проводиться розрахунок маневру зміною швидкості ходу. Після повороту на розрахований курс (зміни швидкості ходу) спостереження за метою тривають і проводиться контроль маневру шляхом нанесення місць мети на планшеті. Якщо місця цілі лягають на лінію ЛОД2, маневр виконується правильно. Якщо місця цілі М5, М6, М7 лягають на лінію ЛОД3, паралельну ЛОД2, це означає, що поворот розпочато раніше розрахованого часу і що розбіжність відбудеться на відстані, більшій D03. Зміна напрямку ЛОД, т. Е. Зміщення місць мети в одну сторону, свідчить про зміну ЕДЦ, що потребують нових розрахунків.
Особливості використання HPЛC «Океан»
У комплекті РЛС «Океан» є обчислювальний пристрій, що дозволяє (після ручного захоплення луна-сигналу цілі) визначити DKp, Ткр і ЕДЦ. Точність роботи обчислювача характеризується наступними величинами:DKp визначається з точністю 2-3 каб;
Ткр визначається з точністю близько 2 хв;
Курс зустрічного судна визначається з точністю 5-10 °, Сокор - від 0,5 до 1 уз.
Розрахунок, маневру розбіжності виробляється на маневреному планшеті, як зазначено вище. Обчислювальний пристрій дозволяє імітувати обраний маневр (заздалегідь «програти» його) і оцінити можливі результати, при цьому ЛОД висвічується на екрані індикатора.
Основні варіанти розбіжності з одиночної метою наведені в § 23.11.
Розрахунок на маневреному планшеті маневру розбіжності з кількома цілями одночасно
Маневр по розбіжності з декількома зустрічними судами одночасно є найбільш складним, але необхідність у ньому виникає все частіше, особливо в районах жвавого судноплавства. Пропонувалися досі способи розрахунку цього маневру засновані на застосуванні спеціальних палеток, приховують від оператора фізичний зміст маневру і тому не прищеплюються на флоті.Найбільш раціональним є розрахунок з побудовою секторів небезпечних відносних курсів (COOK), запропонований О. Г. Морєва. Розрахунок маневру пропонованим способом проводиться таким чином (рис. 18.2):
З виявленням на екрані зустрічних суден (цілі № 1, 2, 3) ведуть за кожне з них відносну прокладку на маневреному планшеті;
Провівши Лоді ЛОД2 і ЛОД3, виявивши небезпеку надмірного зближення з однією або кількома цілями, визначають їх ЕДЦ (VМ1, VМ2_ і VМ3);
За мети з максимальною відносною швидкістю (зближення з якою на dкр відбудеться раніше) призначають момент її приходу в попередженні позицію і наносять на цей момент випередження позиції кожної мети 1Mц, 2МЦ, ЗМЦ;
З попередженням позиції кожної мети проводять дотичні до кола Dоз, визначаючи небезпечний сектор (ОС) кожної мети;
В кінці кожного вектора істинної швидкості цілі Vм1, Vм2, Vм3 будують сектор небезпечних відносних курсів;
Для безпечного розходження з усіма цілями одночасно змінюють свій курс чи швидкість так, щоб кінець свого вектора швидкості VK розташовувався поза межами COOK.

Мал. 18.2. Розрахунок маневру розбіжності з кількома цілями одночасно на маневровому планшеті
На рис. 18.2 видно, що зменшення швидкості до величини V "k дозволяє розійтися з усіма цілями на Dkp більше Doз. Якщо кінець свого вектора швидкості Vv буде лежати на кордоні СООК-1, то розбіжність з метою № 1 відбудеться на дистанції Doз, а з іншими - на більшій дистанції. Якщо кінець свого вектора швидкості V "" до перебуватиме в точці перетину сторін СООК-2 і СООК-3, то розбіжність на Doз відбудеться з цими двома цілями, а з метою № 1 - на більшій дистанції. Розраховані варіанти розбіжності доповідаються командиру корабля для вибору і затвердження одного з них. Закінченням маневру розбіжності з усіма цілями можна вважати момент приходу останньої з них на відносний траверс.
* У режимі автосопровождения точність визначення пеленга і дистанції РЛС «Океан» на відстанях до 16 миль становить 0,5-0,7 ° і 30-40 м відповідно.
вперед
Зміст
назад
ПРОКЛАДКА НА маневровий планшет.
1. Справжня прокладка.
Така прокладка може бути виконана безпосередньо на великомасштабної шляховий навігаційній карті або аркуші паперу. Суть методу полягає в наступному. Виявивши на екрані індикатора луна-сигнал іншого судна, визначають його пеленг П1 і відстань D1, пускають секундомір, помічають суднове час Т1, курс свого судна Кн і відлік лага ОЛ1. За пеленгові і відстані наносять розташування луна-сигналу А1 щодо свого місця розташування, попередньо обравши бажаний масштаб (рис. 1). Через певний проміжок часу (для розрахунків зручний інтервал в 3 або 6 хв) спостереження повторюють (П2, D2, Т2, ОЛ2) і наносять розташування свого судна 02 і спостережуваного судна А2. Провівши через точки А2, і А2, пряму лінію, отримаємо лінію істинного переміщення мети КЦ.
По відстані між точками А 1 та А 2 і за часом Т1 і Т2 можна визначити швидкість мети Vц і розрахувати, коли і на якій відстані вона перетне лінію курсу нашої судна Тпер і Dпер.
Для визначення відстані найкоротшого зближення dкр і часу до нього tкр з точки А2 відкладають в сторону, протилежну своєму курсу, плавання судна за час між першим і другим спостереженнями А2F \u003d O1O2. Відрізок O1С, проведений перпендикулярно до лінії, що проходить через точки A1, і F, буде відстанню найкоротшого зближення. Місцезнаходження судів в момент найкоротшого зближення (точки O1 і A4) можна знайти паралельним переміщенням відрізка O1С в положення O4A4. Час зближення на найкоротшу відстань

Для визначення обставин зустрічі і елементів руху іншого судна досить двох спостережень. Однак, щоб виключити промахи в спостереженнях і переконатися у незмінності елементів руху іншого судна в період спостережень, рекомендується збільшувати число спостережень. Знаходження трьох послідовно нанесених через однаковий інтервал часу розташування цілі (A1, А2, А3) на одній прямій і рівність відстаней А1А2 \u003d А2А3 свідчать як про відсутність промахів в спостереженнях, так і про незмінність елементів руху мети в період від T1 до Т3.
До переваг способу істинної прокладки слід віднести його наочність. Недоліком є \u200b\u200bвідносна трудомісткість графічних побудов, необхідних для визначення головних причин зустрічі: дистанції найкоротшого зближення і часу до нього.
2. Відносна прокладка.
Ця прокладка набула широкого поширення, тому що цим способом швидко і легко вирішуються головні питання: на якому найкоротшій відстані розійдуться суду і через якийсь час. При відносній прокладці визначають обставини зустрічі і елементи руху цілі в рухомий системі координат, початок якої приймають в місці знаходження судна-спостерігача. Це відповідає дійсній картині, яку спостерігає судоводитель на екрані індикатора відносного руху.
З точки О, прийнятої за місце свого судна, прокладають спостережені пеленги П1 і П2 і по ним відстані D1 і D2 (рис. 2), Через отримані точки А1, і А2 проводять ЛОД. Довжина перпендикуляра ОС, опущеного з точки О на лінію відносного руху, являє собою в обраному масштабі дистанцію найкоротшого зближення dкр. Час зближення на найкоротшу відстань


При відносній прокладці також швидко визначається і відстань, на якому мета перетне курс нашого судна. Для цього достатньо виміряти відстань ОП. (Якщо ЛОД проходить у нас по носі, визначають точку перетину метою нашого курсу, а якщо ЛОД проходить у нас по кормі - точку перетину нашим судном курсу мети, для чого з центру планшета проводять лінію, паралельну до перетину з ЛОД). Час перетину Тпер визначиться шляхом додавання до показань суднових годин на момент знаходження місця розташування луна-сигналу в точці А2 проміжку часу tпер:

Необхідно нагадати, що в першу чергу судоводитель повинен визначити основні обставини зустрічі, т. Е. Dкр і tкр, а потім вже визначати елементи руху мети.
Істинне переміщення мети є сумою двох переміщень - відносного
І судна-спостерігача або
З огляду на коммутативность суми векторів ![]() можна знаходити
можна знаходити
Двома способами.
Побудова векторного трикутника (див. Рис. 2), показане суцільними лініями, називається прямим. При ньому почала векторів швидкостей (ліній шляхів), прокладених в сторону руху суден, знаходяться в одній точці.
Застосовується іноді також зворотне побудова, при якому вектори, відкладені в сторону руху суден, сходяться своїми кінцями в загальну точку (показані пунктиром).
Надалі ми будемо в основному користуватися прямим побудовою, так як воно більш зручно при вирішенні завдань розбіжності.
Довжина вектора руху судна-спостерігача повинна дорівнювати в обраному масштабі плавання свого судна за час між спостереженнями, прийнятими для побудови векторного трикутника. Довжина отриманого вектора руху мети відповідає плавання мети за час між спостереженнями.
3. Маневрений планшет.
Маневрений планшет є сіткою полярних координат. Для прискорення розрахунків, пов'язаних з плаванням судна за час між спостереженнями, на маневреному планшеті поміщена логарифмічна шкала. Вона побудована в такий спосіб: на прямий від початкової точки в деякому масштабі відкладені відрізки, рівні десятковим логарифмам чисел від 0,1 до 60 і оцифровані в значеннях цих чисел. Оскільки в межах 60 одиниць дії з хвилинами аналогічні діям з числами в десятковій системі, будь-якого відліку на шкалі можна привласнити найменування «Час», «Дистанція» або «Швидкість» та за відомими значеннями двох з них знайти Третє вирішуючи пропорцію
https://pandia.ru/text/80/090/images/image012_74.gif "width \u003d" 331 "height \u003d" 26 "\u003e
При користуванні логарифмічною шкалою слід пам'ятати, що "верхня" ніжка циркуля (встановлюється на великі відліки) завжди показує час, а "нижня" (що встановлюється на менші відліки) - швидкість і дистанцію.
Зі спостережень встановлено відносне переміщення позначки - 2,2 милі за 8 хв. Знайти відносну швидкість.
Ставимо нижню ніжку циркуля на розподіл 2,2, а верхню - на поділку шкали "8";
не змінюючи розчину циркуля, переміщаємо верхню ніжку циркуля на поділку шкали "60". Нижня ніжка циркуля покаже відносну швидкість Vo \u003d 16.5 уз.
t \u003d 17 хв, V \u003d 15 уз. Знайти відстань S.
Ставимо верхню ніжку циркуля на розподіл "60", нижню - на "15";
не змінюючи розчину циркуля, переміщаємо верхню ніжку циркуля на поділку шкали "17". Нижня ніжка циркуля покаже відстань S \u003d 4.3 милі.
При V \u003d 17 уз судно пройшло S \u003d 8,7 милі. Визначити час, за яке судно проходить цю відстань.
Ставимо верхню ніжку циркуля на розподіл "60", а нижню - на поділку шкали "17";
не змінюючи розчину циркуля, ставимо нижню ніжку циркуля на поділку шкали "8,7". Верхня ніжка циркуля покаже час t \u003d 31 хв.
4. Вибір і обгрунтування маневру для розбіжності в заданій дистанції.
якщо dкр< Dзадто необходимо предпринять маневр для расхождения с судном-целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию и выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя tкр, VO и Dзад, выбирает время начала маневра. Последующая графическая прокладка служит для проверки безопасности выбранного маневра и уточнения его величины.
Графічна прокладка для обґрунтування маневру розбіжності в заданій дистанції показана на рис. 3. Вона здійснюється в наступній послідовності:
на ЛОД по передбачуваному часу маневру або по передбачуваної дистанції маневру наноситься точка М розташування цілі в момент початку маневру розбіжності;
уявним розворотом вектора або зміною його довжини відповідно до обраним видом маневру визначають сторону розвороту ЛОД при цьому маневрі;
з точки М проводять по дотичній до Dзад ОЛОД, при цьому з двох можливих дотичних до Dзад проводиться та, яка відповідає стороні розвороту ЛОД при обраному виді маневру;
через кінець вектора паралельно ОЛОД в напрямку, протилежному напрямку ОЛОД, проводиться лінія вектора нової відносної швидкості;
якщо обраний маневр зміною курсу, то новий напрямок вектора швидкості судна-спостерігача знаходять розворотом вектора навколо точки O1 до перетину з лінією вектора нової відносної швидкості; кут між векторами і визначить необхідний кут одвороту;
якщо обраний маневр швидкістю, то новий вектор швидкості судки-спостерігача дорівнює відрізку вектора від точки O1 до лінії нової відносної швидкості;
якщо обраний комбінований маневр курсом і швидкістю, то для знаходження нового курсу судна-спостерігача навколо точки O1 розгортається зменшений відповідно до передбачуваного сбавленіем ходу вектор судна-спостерігача.

5. Облік інерції судна.
При вирішенні завдань в попередніх розділах передбачалося, що судно миттєво змінює свої елементи руху і ЛОД при маневрі різко змінює свій напрямок на ОЛОД. в дійсності це, звичайно, не так, і інерційність судна необхідно враховувати.
Облік циркуляції.
Відповідно до НШС-82 елементи повороткості представлені в таблиці маневрених елементів у вигляді графіка і таблиці при циркуляції з повного переднього ходу на правий і лівий борт в вантажу і в баласті з положенням керма "" на борт "" (\u003d 35 °) і " на полборта "(\u003d 15 ÷ 20 °). При вирішенні завдань цієї глави передбачається, що будуть використані діаграми циркуляції, наведені на рис. 4 для перекладки керма \u003d 20 °. Слід мати на увазі, що параметри фактичної циркуляції судна можуть істотно відрізнятися від табличній в залежності від швидкості судна, його посадки (крену і диференту), співвідношення опади і глибини, напряму і сили вітру і хвилювання.

При зміні курсу судном-спостерігачем (рис. 5) щодо розташування цілі буде переміщатися по криволінійній траєкторії від точки М1 на ЛОД (в момент початку маневру судна-спостерігача) до точки F на ОЛОД (в момент закінчення маневру). Надалі мета переміщається по ОЛОД, зміщеною на расстояніe Реальне відносне переміщення мети буде складніше. Внаслідок падіння швидкості судна-спостерігача на циркуляції ОЛОД НЕ буде паралельна вектору V01 до тих пір, поки наше судно знову не набере на прямому курсі первісну швидкість ходу. В даному випадку падіння швидкості ходу на циркуляції частково компенсує. У багатьох випадках (наприклад, при розбіжності із зустрічною метою) внаслідок падіння швидкості судна-наблюдатедя на повороті https://pandia.ru/text/80/090/images/image016_68.gif "width \u003d" 600 "height \u003d" 369 " \u003e
1. Спосіб відносного проміжного курсу.
З графічної прокладки знаходять необхідний кут зміни курсу; з таблиці маневрених елементів по куту одвороту знаходять час, що витрачається судном на поворот, tман; кут проміжного курсу і проміжне плавання S пр; з точки М1 позиції мети в момент початку повороту відкладають за час повороту; з кінця вектора в бік, протилежний проміжного курсу, відкладається проміжне плавання S пр; через початок вектора S пр проводиться ОЛОД паралельно.
Спосіб точний, але трудомісткий. При вирішенні завдань розбіжності на містку судна не застосовується. Застосовується при розборі аварій і в якості еталонного при оцінці точності наближених способів.
2. Спосіб умовної попередження точки.
ОЛОД проводиться не з точки М1 розташування цілі в момент початку маневру, а з умовної попередження точки М, віднесеної за ЛОД вперед на час попередження tупр. У першому наближенні як tупр приймають половину часу повороту. Таким чином, при цьому способі обліку циркуляції поворот судна-спостерігача починається на tупр ~ 0,5 tман раніше, ніж судно-мета прийде в точку, з якої проведено ОЛОД.
Спосіб найбільш часто застосовується на практиці. Більш точний для зустрічних цілей і менш точний для цілей, що йдуть сходяться курсами. Непридатний при повороті під корму судна-сателіта, так як в цьому випадку V0 \u003d 0 і при будь-якому tупр точки М і М1 збігаються.
3. Спосіб введення поправки в Dзад.
Як показують розрахунки, при зміні курсу судна-спостерігача на кут до 90 ° помилки в Dзад внаслідок інерційності повороту не перевищують тактичні радіусу циркуляції. При великих кутах повороту досягають діаметра циркуляції. У цьому способі Dзадназначается з запасом на максимально можливу помилку від неврахування циркуляції. Цей спосіб є основним при повороті під корму потенційно небезпечного судна, що йде паралельним або майже паралельним курсом.
Облік інерції при маневрі швидкістю.
Інерційні характеристик і судна відповідно до НШС-82 представляються у вигляді графіка, побудованих в постійному масштабі відстаней і мають шкалу значень часу і швидкості. При вирішенні завдань цієї глави передбачається, що буде використана інформація про інерційно-гальмівних характеристик судна водотоннажністю близько 10000 т (судно I) і судна водотоннажністю близько 60 000 т (судно II), наведена в Додатку I.
При зміні швидкості судном-спостерігачем відносне розташування цілі буде переміщатися по криволінійній траєкторії, кривизна якої поступово зменшується в міру виходу свого судна на нову сталу швидкість. Помилки від неврахування інерції при маневрі швидкістю можуть досягати декількох миль звідси важливість врахування інерції. При маневрі швидкістю на великотоннажному судні нова швидкість судна-спостерігача встановлюється через десятки хвилин і весь цей час мета переміщається по кривій ЛОД - звідси складність обліку інерції.
Облік інерції можливий наступними способами.
1. Спосіб побудови кривої ОЛОД.
Відносна траєкторія руху судна може бути знайдена побудовою колійних трикутників за послідовні інтервали часу t1, t2, ..., tn, після маневру So (ti) \u003d Sц (ti) - S н (ti)
Для побудови кривої ОЛОД необхідно (рис. 6):
з точки М розташування поділи в момент початку маневру нашого судна провести лінію курсу цілі і відзначити на ній відрізки, прохідні метою через певні інтервали часу, наприклад, через кожні три хвилини (точки В1, В2, ..., Вn); з точок Вi провести лінії в сторону, зворотну курсу судна-спостерігача, і відкласти по ним відрізки, пройдені судном-спостерігачем за відповідний час після маневру (точки C1, C2, ..., Cn); через точки Сi провести криву ЛОД і визначити dкр як найкоротша відстань від центру планшета до кривої.

Спосіб точний і наочний, але трудомісткий. Цим способом вирішується тільки завдання передбачення dкр no заданої маневру, але не вирішується завдання по знаходженню необхідного зміни швидкості для розбіжності в заданій дистанції. Для вирішення завдань в умовах містка не застосовується. Використовується при розборі аварій, а також в якості еталонного для оцінки точності наближених способів обліку інерції.
2. Спосіб введення поправки в Dзад.
Якщо в якості запобіжного інерційності судна прийняти характеристику tv (Інерційна характеристика tv чисельно дорівнює часу падіння швидкості наполовину при меневра СТОП..gif "width \u003d" 106 "height \u003d" 24 src \u003d "\u003e. Gif" width \u003d "67" height \u003d " 22 "\u003e. gif" width \u003d "34" height \u003d "22 src \u003d"\u003e не перевищує 3 кб. У цьому випадку Dзад може призначатися з запасом на максимально можливу помилку. Цей спосіб може бути основним для суден водотоннажністю до 1000 т.
3. Спосіб умовної попередження точки (рис. 7)
При цьому способі обліку інерції в трикутнику швидкостей відкладається нова стала швидкість судна-спостерігача, але ОЛОД проводиться не з точки M1 розташування цілі в момент початку маневру, а з умовної попередження точки М, віднесеної за ЛОД вперед на час попередження tупр. У першому наближенні як tупр приймають половину часу, за яке встановлюється нова швидкість свого судна. Таким чином, при цьому способі обліку інерції команда на сбавленіе ходу дається на tупр ~ 0,5 tман раніше, ніж судно-мета прийде в точку, з якої проведено ОЛОД. При правильному виборі часу попередження ОЛОД пройде по дотичній до фактичної траєкторії луна-сигналу.

При цьому способі обліку інерції умовно вважається, що протягом tупр зберігається колишня швидкість судна-спостерігача Vн (при цьому завищується пройдений шлях), а після миттєво встановлюється нова швидкість Vн1 (при цьому пройдений шлях знижується). Як видно з рис. 8, оптимальним буде такий час попередження, при якому завищення пройденого шляху за час tупр, компенсується наступним заниженням. Це відповідає рівності заштрихованих площ на рис. 8.

На рис. 9 приведена інформація щодо вибору оптимального часу попередження в залежності від обраного маневру (Vн1 / Vн \u003d 0 - СТОП, Vн1 / Vн \u003d 0,5 - МПХ і т. Д.) І характеристики інерційності tv. На оснооаніі цієї інформації на початку рейсу може бути складена робоча таблиця часупопередження.

Судно має інерційну характеристику tv \u003d 4 і має наступну градацію швидкостей ППХ 14 уз, СПГ 10 уз, МПХ 8 уз, СМПХ 5 уз. Скласти робочу таблицю часупопередження.
ППХ - СПГ. Vн1 / Vн \u003d 10: 14 \u003d 0,71. З графіка на рис.9 tупр / tv \u003d 0.8; tупр \u003d 0,8 * 4 \u003d 3,2 ~ 3 хв. Розрахувавши аналогічно для Vн1 / Vн \u003d 0,57; 0,3; 0, отримаємо для маневру сбавленія швидкості з повного ходу.
СМПХ, СТОП |
|||
4. Спосіб середньої швидкості.
При цьому способі обліку інерції в трикутнику швидкостей фільм Не нова швидкість судна-спостерігача, а деяка середня (еквівалентна) швидкість за час від початку маневру до моменту найкоротшого зближення  Через кінці векторів Vcp і Vц проводиться вектор середньої відносної швидкості і паралельно йому з точки М проводиться ОЛОДср (рис.10). Фактично луна-сигнал буде переміщатися по кривій лінії, розташованої між ЛОД і ОЛОДср опуклістю в бік ЛОД, і в точці найкоротшого зближення перетинів ОЛОДср.
Через кінці векторів Vcp і Vц проводиться вектор середньої відносної швидкості і паралельно йому з точки М проводиться ОЛОДср (рис.10). Фактично луна-сигнал буде переміщатися по кривій лінії, розташованої між ЛОД і ОЛОДср опуклістю в бік ЛОД, і в точці найкоротшого зближення перетинів ОЛОДср.

У першому наближенні як середньої швидкості може бути прийнята середня арифметична між старою і новою
![]()
При малому часу до найкоротшого зближення () помилка при цьому не перевищить 10% вибігання судна при вільному гальмуванні.
Більш точно величина середньої швидкості може бути знайдена з універсальної таблиці обліку інерції, наведеної в Додатку 2. Використання універсальної таблиці обліку інерції розглянемо на прикладах.
Знайти середню швидкість судна I за час від початку маневру ППХ - МПХ до найкоротшого зближення, якщо tкр \u003d 20 хв.
З графіків гальмівних шляхів судна I (Додаток 1) для швидкості 16 уз знаходимо tv \u003d 4 хв. В універсальній таблиці обліку інерції в колонці tv \u003d 4 знаходимо найближчим tкр \u003d 22 хв і в відповідному рядку для реверсу 0,5 Vн отримуємо Vср / Vн \u003d 0,6. Середню швидкість можна відкласти в трикутнику швидкостей глазомірним виділенням 0,6 відрізка Vн або, при необхідності, перевести в вузли Vср \u003d 0,6 * 16 \u003d 9,6 уз.
За результатами радіолокаційної прокладки отримали, що для розбіжності з метою в Dзад необхідно мати Vср ~ 0,5Vн. За ОЛОДср і Vо ср визначили час від початку маневру до найкоротшого зближення tкр ~ 20 хв. Інерційна характеристика судна tv \u003d 8 хв. Який маневр швидкістю необхідно вжити для розбіжності на Dзад?
В універсальній таблиці обліку інерції в колонці tv \u003d 8 хв знаходимо tкр \u003d 19 хв і в відповідному рядку шукаємо найближче менше значення Vcр. В даному випадку Vcр \u003d 0,5Vн знаходиться в колонці "СТОП". Для розбіжності з метою в Dзад необхідно дати "СТОП". У сусідній колонці бачимо, що Vt / Vн \u003d 0,25, т. Е. Фактично до моменту розбіжності швидкість буде 0,25 Vн.
Додаток 1А.
Судно I водотоннажність близько 10000 т.
https://pandia.ru/text/80/090/images/image033_47.gif "width \u003d" 423 "height \u003d" 442 src \u003d "\u003e
Додаток 2.
маневрений планшет
засіб малої механізації для графічного вирішення завдань прямолінійного маневрування. Використовується як при бойовому маневруванні (заняття позиції для використання зброї, зближення з метою на задану відстань, ухилення від зустрічі та іншої задачі), так і при розбіжності з судами в море.
- - 1) дошка Мензула, що служить столиком для креслення при зйомці; 2) аркуш паперу, наклеєний на мензулу, на к-рий наноситься план знімається місцевості; 3) окремий лист топографічної карти ...
Технічний залізничний словник
- - пристрій зі спеціальної плоскою поверхнею і пристосуванням, що вказує координати зображення для їх введення в ...
Короткий тлумачний словник по поліграфії
- - English: Maneuvred regime Режим роботи електростанції зі змінною потужністю протягом встановленого інтервалу часу Джерело: Терміни та визначення в електроенергетиці ...
будівельний словник
- - Маневрена а, е. manoeuvre f. 1. Від. до маневру; призначений для них. Маневрений паровоз. БАС-1. 2. Провідні без довготривалих укріплень. Про військових операціях. Маневрена війна. Маневрена оборона. БАС-1 ...
Історичний словник галліцізмов російської мови
- - маневрений і ...
- - і ...
Орфографічний словник російської мови
- - -а, -е. 1. Провідні із застосуванням маневрів, без довготривалих укріплень. Маневрена війна. 2. Здатний швидко змінювати напрямок руху. М. крейсер. Маневрена тактика. | сущ. маневреність, -і, дружин. ...
Тлумачний словник Ожегова
-
Тлумачний словник Ушакова
- - Маневрена і маневреність, маневрена, маневрене. Що ведеться без довготривалих укріплень; ант. позиційний. Маневрена війна ...
Тлумачний словник Ушакова
- - маневрений маневрений, ман`евренний дод. 1. Провідні із застосуванням маневрів, без довготривалих укріплень. 2. Він володіє здатністю маневрувати 1 ....
Тлумачний словник Єфремової
- - дод. 1. Провідні із застосуванням маневрів, без довготривалих укріплень. 2. Він володіє здатністю маневрувати. // сприяє швидкій зміні напрямку руху. 3. устар. Призначений для маневрів ...
Тлумачний словник Єфремової
- - ая, -е. 1. воєн. Що ведеться з широким застосуванням маневру, без довготривалих укріплень; противоп. позиційний. Маневрена війна ...
Малий академічний словник
- -; коротко. форма ен, -енна і ман "евренний; скор ...
Російський орфографічний словник
- -; маневрена війна ...
Російське словесний наголос
- - ...
форми слова
- - рухливий, мобільний; повороткі, високо, разворотливости ...
Словник синонімів
"Маневрений планшет" в книгах
Маневрений «Філін»
З книги Геній «Фокке-Вульфа». Великий Курт Танк автора Анцеліовіч Леонід ЛіпмановічМаневрений «Філін» Курта Танка переконали дати його розвіднику нове ім'я: «Філін». Філін в природі крупніше сови і набагато більш грізна хижий птах. Розмах його крил перевищує півтора метра. Пугачі літають абсолютно безшумно, а головне, мають унікальну
Планшет жовтої шкіри
З книги «Не плачте за нас ...» автора Качаев Юрій ГригоровичПланшет жовтої шкіри Повернувшись додому, Ніна Елістратовна дізналася, що Юрій разом з Муратом і Лівою Акімовим вирушили в місто. Син залишив на столі записку, вона закінчувалася словами: «З полювання прийдемо пізно. Не хвилюйся ».Легко сказати, не хвилюйся, коли скоро вісім, а з
Кафедра ваннах: Планшет в хмарах
З книги Компьютерра PDA N138 (01.10.2011-07.10.2011) автора Журнал «Компьютерра»Кафедра ваннах: Планшет в хмарах Автор: Ваннах МіхаілОпубліковано 05 жовтня 2011 року самому кінці вересня 2011 року компанія Amazon піднесла всім виробникам планшетів хорошу пігулку, або, точніше, таблетку. (А як ще накажете перевести аглицким слівце Tablet?) В ролі
Комп'ютер і планшет
З книги Сім навичок ефективних батьків: Сімейний тайм-менеджмент, або Як встигати все. Книга-тренінг автора Хайнц МаріяКомп'ютер і планшет Думаємо, ви розумієте, що комп'ютери і планшети увійшли в наше життя всерйоз і надовго. Не потрібно бути віщуном, щоб помітити тенденції заміни старих паперових технологій інтерактивними. Противитися цій тенденції - все одно що противитися
Швидкісний маневрений біплан - літак поля бою
З книги Штурмовики Червоної Армії. Том 1. Формування вигляду автора Перов Володимир ІллічШвидкісний маневрений біплан - літак поля бою Паралельно робіт по модифікації серійних літаків-розвідників в легені штурмовики і створення «військового літака» серед деякої частини фахівців ВВС Червоної армії набула поширення теорія атаки
ПЛАНШЕТ ПОЛКОВНИКА
З книги автораПЛАНШЕТ ПОЛКОВНИКА Перед нами - публіцистичні та поетичні одкровення - оперативна аналітика та замальовки з «натури» ... Вони нам потрібні, щоб з сьогоднішнім досвідом осмислити наше минуле. Щоб згадати себе молодими. І ще. Вони цікаві долею автора - військового
планшет
З книги Велика Радянська Енциклопедія (ПЛ) автора ВікіпедіяIFA 2010: Раз планшет, два планшет Андрій Письмовий
З книги Цифровий журнал «Компьютерра» № 33 автора Журнал «Компьютерра»IFA 2010: Раз планшет, два планшет Андрій Письмовий ОпублікованоАндрей Письмовий Планшетні комп'ютери існували задовго до Apple iPad, але з його появою в їхньому світі все помітно змінилося. Тепер до розробників, здається, дійшло, що планшет не
Вибираємо сучасний планшет
З книги Компьютерра PDA N148 (03.12.2011-09.12.2011) автора Журнал «Компьютерра»Вибираємо сучасний планшет Автор: Олег НечайОпубліковано 06 грудня 2011 годаПоявленіе на ринку планшета iPad було зустрінуте публікою із захопленням, чимало здивував всіх інших виробників портативних комп'ютерів. Справа в тому, що планшети з сенсорним екраном серійно
Кафедра ваннах: Планшет і десктоп
З книги Компьютерра PDA N137 (24.09.2011-30.09.2011) автора Журнал «Компьютерра»Кафедра ваннах: Планшет і десктоп Автор: Ваннах МіхаілОпубліковано 27 вересня 2011 годаОсенью 2011 року в пресі, переважно північноамериканської, знову з'явилися численні прогнози швидкої смерті класичного настільного персонального комп'ютера. привід до
З книги автораМаневрений період війни - операції на германо-австрійському фронті: Галицька битва і Східно-Прусська операція
З книги автораМаневрений період війни - операції на германо-австрійському фронті: Галицька битва і Східно-Прусська операція
З книги автораМаневрений період війни - операції на германо-австрійському фронті: Галицька битва і Східно-Прусська операція Перед першим походом в Східну Пруссію великий князь Микола Миколайович заявляв про готовність почати рух на Берлін чотирма арміями: перші дві
Маневрений період війни - операції на германо-австрійському фронті: Галицька битва і Східно-Прусська операція
З книги автораМодель "планшет"
З книги Книга-подарунок, гідний королеви краси автора Кріксунова Інна АбрамівнаМодель "планшет" Є жорстку сумку у вигляді прямокутника, витягнутого по вертикалі. Сумка-планшет має отлетной клапан, повністю або частково закриває перед сумки, внизу цього клапана розташований замок застібки. Ця модель сумки носиться на довгому
 Освітлювальні прилади на основі світлодіодів змінного струму знаходять свою нішу і, можливо, вийдуть за її межі
Освітлювальні прилади на основі світлодіодів змінного струму знаходять свою нішу і, можливо, вийдуть за її межі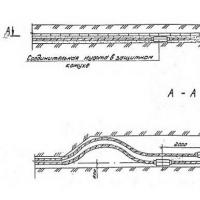 Вимоги і розцінки на прокладку кабелю в землі Область застосування, визначення
Вимоги і розцінки на прокладку кабелю в землі Область застосування, визначення Автомобільний стробоскоп з лазерної указки
Автомобільний стробоскоп з лазерної указки Замовити 20 грн на рахунок. Як взяти в борг на мтс. Додаткова інформація за послугою
Замовити 20 грн на рахунок. Як взяти в борг на мтс. Додаткова інформація за послугою Як перевірити поповнення рахунку
Як перевірити поповнення рахунку Як взяти кредит на Теле2?
Як взяти кредит на Теле2? Чуйність SSD на мініатюрній платі Який SSD-накопичувач купити
Чуйність SSD на мініатюрній платі Який SSD-накопичувач купити