Folosind un radar pentru discrepanță. Un algoritm de acțiune exemplar pentru manevrarea atunci când lucrați cu un tabletă de manevrabilitate manevrabilă Cum se măsoară viteza
Tipul documentului: Toolkit. | Doc.
Popularitate: 0,23%
Pagini: 16.
Limba: Rusă ucraineană.
Anul publicării: 2005.
Metodichn la Vkazіvki Traca la Vincannya Roboti Rlob з Disciliplin "Trapher Experience і zarp" pentru cursivul 4-a în absență în Ucraina involuționară
Fiecare elev în funcție de opțiunea sa efectuează 5 sarcini pe forma unei tablete manevrabile și răspunde la 2 întrebări pe o foaie separată. Forme de tablete manevrabile cu sarcini rezolvate și o listă cu răspunsuri sunt hrănite într-un dosar separat.
Versiunea lucrării de testare este selectată în funcție de ultima cifră a cifrului personal.
Opțiunea №№ Sarcinile Număr de probleme
1 1, 11, 21, 31, 41 1, 11
2 2, 12, 22, 32, 42 2, 12
3 3, 13, 23, 33, 43 3, 13
4 4, 14, 24, 34, 44 4, 14
5 5, 15, 25, 35, 45 5, 15
6 6, 16, 26, 36, 46 6, 16
7 7, 17, 27, 37, 47 7, 17
8 8, 18, 28, 38, 48 8,18
9 9, 19, 29, 39, 49 9, 19
10 10, 20, 30, 40, 50 10, 20
Pentru execuția competentă a lucrărilor de testare, este necesar să se exploreze regulile nr. 5, 6, 7, 8, 9, 10 din MPP-72, precum și instrucțiuni metodice scurte privind soluția grafică a sarcinilor pe tableta manevrabilă.
În pagina de titlu a dosarului de lucru de testare, specificați numele, prenumele, patronimic al unui student, număr de cifru personal, nume de disciplină, curs, număr de opțiuni, specialitate.
Lucrarea efectuată în perioada prescrisă este transmisă pentru a verifica profesorul.
Un student este permis să testeze, care a efectuat controlul și munca de laborator.
Scurt instrucțiuni metodice privind soluționarea grafică a sarcinilor pe tableta manevrabilă.
Procedura de rezolvare a problemei discrepanțelor cu o singură navă
pe o tabletă manevrabilă
(A se vedea apendicele 1, 2)
Condițiile de vizibilitate limitată sunt condițiile speciale de înot, prin urmare disciplina "radar simulator" și "Simulatorul SARP" sugerează că există mai întâi înot în aceste condiții.
Atunci când înotați cu vizibilitate limitată în Marea Deschisă, prezentarea generală a împrejurimilor care utilizează radar se face în principal pe scale de scară de 12-16 mile, iar această distanță este probabil o distanță de detectarea majorității navelor.
Bună practică maritimă pentru a rezolva problema discrepanțelor cu instanțele din Marea Deschisă, recomandă divizarea ecranului RLS în trei zone:
1) Zona de evaluare a situației de la 12 la 8 mile, în cazul în care gradul de risc de coliziune, perechile de mișcare a mișcării vaselor care se apropie sunt determinate și manevra pierde;
2) Zona de manevră de la 8 la 4 mile. Acțiunile pentru discrepanțe sunt recomandate să ia cât mai curând posibil după stabilirea riscului de coliziune;
3) Zona de apropiere excesivă de la 4 mile. Înainte de intrarea ecoului navei în această zonă, manevra de discrepanță din Marea Deschisă trebuie completată astfel încât atunci când schimbați situația ca urmare a manevrelor incorecte ale navelor, a existat timp și spațiu pentru a elimina riscul de coliziune.
Atunci când înotați în condițiile vizibilității limitate a instanțelor privilegiate, nu există obligația de a preveni coliziunea, iar următoarea prioritate a manevrelor este atribuită fiecărui vas cu RLS.
1. Rotiți spre dreapta;
2. reducerea vitezei;
3. Oprirea navei;
4. Rotiți spre stânga.
Presupunerea principală în rezolvarea problemei discrepanțelor pe o tabletă de manevrabilă (tabletă situațională) și utilizarea SARP este imuabilitatea parametrilor de mișcare (cursuri și viteze) a propriei sale nave și alte nave pentru perioada de set de informații și rezolvarea problemei.
Momentul a început să rezolve problema - momentul începutului discrepanței, "punctul zero" este momentul eliminării primei referințe a direcției și distanța până la primul gol.
Timpul de întoarcere la parametrii inițiali ai mișcării navei lor este momentul sfârșitului discrepanței.
Când radarul este pornit, este necesar să reglați corect luminozitatea și îmbunătățirea receptorului și, dacă este necesar, să reduceți efectele interferenței de emoție și precipitații.
Procedura de rezolvare a problemei discrepanțelor pe o tabletă manevrabilă:
1) Din centrul tabletei, țineți vectorul de a vă deplasa propria navă în 6 minute, VN.
2) Faceți intrări în tabelul de procesare a informațiilor radar despre cursul (CN) și viteza (VN) a navei dvs.
3) din centrul tabletei de către raza Dzad. Cerc. Recomandat cu vizibilitate limitată de a lua în condițiile marii deschise Dzad. \u003d 1,5 ÷ 2 mile, și în apele înghesuite ale DVD-urilor. \u003d 0,5 mile.
4) vizionarea situației de pe ecranul RLS pentru a selecta la modificarea coordonatelor polare relative (Δp ≈ 0 și ΔD 5) de pe ecranul RLS pentru a elimina referințele lagărului și distanța vasului de ecou periculos, porniți cronometrul, Observați timpul navei, efectuați înregistrări în tabelul de procesare Informații radar pentru punctul zero 0 ا, purtător și distanța pentru navă A.
6) În conformitate cu aceste date, puneți situația inițială pe tableta manevrabilă, referindu-se la numărul zero 0 ا și la litera mare A.
7) Folosind conducătorul paralel pentru a trimite (stick) vectorul de deplasare a navei proprii în 6 minute VN în punctul zero și a început să desemneze litera F (fixă), vectorul desemnează litera Vn.
8) Desfășurați o parte a cercului în zona punctului zero, spre dreapta și spre stânga din ea (sau cerc) cu o rază de VN din centrul F, care va accelera soluția grafică a problemei.
9) În minutul 6, scoateți referințele lagărului și distanța ecoului aceluiași vas a și le scrie în tabelul de prelucrare a informațiilor radarului.
10) Conform datelor obținute, aplicați un punct de 6 minute pe o tabletă manevrabilă, indicând-o cu un număr de 6 ا.
11) Conectați punctul zero și 6 minute direct pentru a determina vectorul de mișcare țintă relativ în 6 minute. Săgeata vectorială vizează un punct de 6 minute. Denotă acest vector vo.
12) Extindeți vectorul VO în centrul tabletei, primim un jurnal - o traiectorie care va muta ecoul navei și cu imutabilitatea cursurilor și ratele proprii și contracade.
13) Din centrul tabletei de pe jurnal, omiteți perpendicular și eliminați valoarea DCR.
14) Determinați vectorul grafic VO de la punctul zero la baza liniei perpendiculare a liniei DCR cea mai scurtă convergență a vaselor TKR.
15) Valorile rezultate ale înregistrării DCR și TKR pe tableta manevrabilă.
16) Conectați punctul F cu un punct direct de 6 minute, obținem un vector de 6 minute VC, îndreptat într-un punct de 6 minute, desemnați-l VC.
17) Folosind o conducător paralelă și un contor pentru a determina cursul adevărat și viteza țelului de navă a, făcând înregistrări pe o tabletă manevrabilă;
18) Aplicați punctul de preemptiv (se recomandă 12 minute, luând în considerare ora setată de timp (tn.i. \u003d 6 min., Rezolvarea problemei lui Tr.z. \u003d 3 min. Și efectuarea unei manevre TM \u003d 3 min) Și petreceți linii punctate de la ea tangenți în cercul razei Dzad. Obținem sate pentru care ecourile navei ar trebui să se miște atunci când efectuează o manevră. În poală, laterale va fi lăsată din vas și viceversa.
19) De la un punct de 6 minute pentru a petrece linia paralelă cu anii în direcția opusă pentru a determina sectorul cursurilor periculoase (suc), dincolo de care trebuie să retrageți sfârșitul vectorului VN pentru a rezolva problema discrepanței. Dacă punctul F este în interiorul sucului, este imposibil să se rezolve problema discrepanței cu o scădere a vitezei.
20) Selectați o manevră eficientă de discrepanță la o distanță sigură, iar schimbarea cursului și / sau viteza trebuie să fie destul de mare, astfel încât să se observe de către nava viitoare. Manevrarea de rotire, în general, spre dreapta, ar trebui să fie de cel puțin 30-45 °, iar reducerea vitezei ar trebui să fie de cel puțin jumătate.
Modificările combinate de manevră în curs și viteza în practică sunt rareori aplicate datorită deteriorării gestionabilității vasului atunci când viteza este redusă.
Conform cerințelor regulii 19 MPPSS-72 "... pe cât posibil pentru a evita:
- modificări la stânga, dacă o altă navă este înaintea traversei și nu este depășită;
- schimbări în direcția navei situată pe traversage sau în spatele traversei ";
- De asemenea, ar trebui să se țină seama de restricțiile privind radarul, din cauza cărora ecoul navei din stânga nu poate fi observată pe ecran.
Metodă de bandă grafică
Garnitura grafică oferă informații mai precise despre situația instanțelor și se efectuează pe o tabletă manevrabilă M-78 (figura 212)
Sarcina discrepanței constă în: 1) aplicarea situației inițiale pe tableta și construirea triunghiurilor de viteze de vectori de viteză relativă;
2) estimări ale situației unei apropieri periculoase (coliziune) cu instanțele, ale căror ecouri sunt observate pe ecranul RLS, calculând timpul cel mai scurt convergenței / KR, intersecția / "EP, distanța dintre cele mai scurte convergențe de DPR și identifica pericolele lor reale și potențiale;
3) alegerea și justificarea manevrei, alocarea navelor cu care este necesar să se disperseze;
4) Calcularea manevrei selectate utilizând reconstrucția grafică a triunghiurilor vectoriale ale situației inițiale;
5) Calculul timpului de începere a manevrei (luând în considerare elementele de manevră
Vasul) este selectat timpul preventiv (3 sau 6 minute), distanța discrepanței, timpul discrepanțelor și distanța de la cursul său inițial în timpul manevrării;
6) Aplicarea liniei așteptate de mișcare relativă (vechi) și controlul ulterior asupra mișcării obiectivului (navă observabilă).
Luați în considerare în detaliu procesul de rezolvare a problemei discrepanței cu ajutorul graficului (radar) care se află pe o tabletă manevrabilă.
1. Pentru confortul calculelor, intervalul de timp durează 3 sau 6 minute, T e. 1/20 sau 1/10 h.
2. Construiți pe tabletă din vectorul său de centru, desigur, și viteza VL a vasului nostru.
![]()
Smochin. 213. Soluția problemei discrepanței cu stabilirea grafică
![]()
Figura 214 Determinarea potențialului pericol și localizarea navei, pentru discrepanțele cu care este obligat să facă o manevră
3. Cu aspectul pe ecranul RLS al semnalelor ECHO, determinăm documentele și distanțele lor și se aplică tabletei.
4. Prin intervale egale de timp (3 sau 6 minute) în secvența anterioară, aplicăm următoarele puncte și după compusul obținem vectorii de viteză relativă.
5. Cu acești vectori, construim triunghiuri vectoriale, pentru care VC-ul navei dvs. din centrul tabletei este transferat în primul punct L prin conectarea începutului vectorului VC cu al doilea punct 2, obținem vectorul de viteză a vasului observat w
6. Punctele de conectare a liniei 1 și 2 vor fi vândute pentru centrul tabletei, vom obține Lod.
Evaluarea situației este de a determina gradul de pericol al coliziunii instanțelor. Noi găsim cea mai scurtă distanță DKP, coborând perpendicular din centrul tabletei la Lod și punctul de intersecție a cursului Dnep țintă, pentru care realizăm o linie din centrul tabletei, paralel cu vectorul de viteză a "obiectivului de judecată de a trece
Identificarea potențialei viteze a navelor poate fi efectuată în două moduri:
1) pierdem manevra navei noastre (VC) sau a vaselor-gol (v ") și determinăm prin schimbarea lodului și a puterii de tranziție a potențialului de la potențialul pericol în realitate. Schimbarea cursului, vitezei sau manevra combinată a vasului nostru spre dreapta agravează situația cu nava "B". În acest caz, manevra este necesară cu vasul "B" (fig.254);
2) Folosind caracteristicile mișcării semnalelor ECHO în mișcarea relativă pe ecranul RLS, care a fost dezasamblat în detaliu cu metoda de evaluare vizuală.
Pentru a selecta și a justifica tipul de manevră, toate opțiunile posibile pierd: Schimbarea cursului, viteza sau altele în același timp, toți factorii asociați cu înotul vizibilității limitate, caracteristicile de navigare ale zonei de scufundări, MPPSS-72 și Capacitățile manevrabile ale navei lor și un posibil gol de manevră. Nava trebuie să se străduiască pentru o discrepanță sigură, cu o opțiune acceptabilă de a calcula manevra folosind o paletă și un conducător. El minimizează munca grafică pe una sau două nave. În fig. 215 Calculați manevra pentru o discrepanță sigură prin schimbarea cursului său spre dreapta. Poziția punctelor preemptate nu afectează metoda de calcul folosind triunghiurile vectoriale ale situației inițiale. Trebuie întotdeauna să vă amintiți că momentul punctului preemptiv este momentul condițional al sfârșitului manevrei.
Momentul de începere a manevrei navei sale este calculat ținând cont de elementele manevrabile ale navei (inerția, frânarea, întoarcerea etc.).
![]()
Smochin. 215 Calcularea manevrei pentru discrepanțe pentru a schimba cursul spre dreapta; Calculul se face cu vasul "B"
În triunghiul vectorial al navei "A" vector al vitezei noastre se întoarce spre dreapta la unghiul calculat. Avem un nou vector de vopsea relativă vO și conectați punctul _2 cu capătul vectorului VQ rotativ. În paralel, vectorii vitezei relative v "o din punctul de preemptiv realizăm" A ". Punctul preventiv este luat în același interval de timp. După aceea, este posibil să se determine timpul de discrepanță al vaselor TPICX și Distanța deșeurilor D0TX de la cursul navei noastre (a se vedea figura 215).
Pentru a calcula, folosim noul vector al vitezei relative W Distanța de deșeuri este calculată pe tabletă. Pentru a face acest lucru, pe linia noului nostru curs, așezat din centrul tabletei, amânăm distanța pe care o va trece nava noastră în timpul discrepanței. Apoi, din punctul rezultat, omiteți perpendicular pe linia cursului inițial. Segmentul acestei perpendiculare va fi distanța de la cursul de pe scara tabletei.
Rezultatul manevrelor este controlat de un explorator. Nu numai vasul este aplicat în tabletă, în raport cu care manevra, dar și alte nave, care reprezintă un potențial pericol. Aceste linii ale mișcării relative preconizate sunt efectuate pentru a controla situația în curs de dezvoltare după manevră, pentru a detecta în timp util manevra altor nave, precum și în cazul unor greșeli în calcule și clădiri grafice.
Din cele de mai sus, vedem că ambele metode sunt interdependente și completează reciproc, asigură rezolvarea problemelor privind discrepanța în siguranță a instanțelor care utilizează radar în condiții de vizibilitate limitată.
Pe unele nave deasupra ecranului RLS, este instalată o tabletă de oglindă. Acesta este un dispozitiv auxiliar care este un sistem optic nonparaxus. Avantajul comprimatului oglindă este că face posibilă efectuarea unei garnituri grafice fără întreruperea observațiilor pe ecranul RLS.
Îmbunătățirea periodică a calificărilor, expeditorii flotei marine permit instrucțiuni de formare pentru a rezolva problemele asupra simulatoarelor radarului.
Datorită imposibilității acțiunilor convenite ale navelor (navelor) în condiții de vizibilitate limitată, numărul discrepanțelor este prezentat în formularul categoric, ci sub formă de recomandări. În conformitate cu regula 19 p. Nava care a găsit o altă navă cu un radar, trebuie să determine, în primul rând, dacă există un risc de coliziune. "Dacă există îndoieli cu privire la pericolul coliziunii, ar trebui să se presupună că există" (Regula 7 p. "A").
Alegerea unei manevre pentru a evita apropierea excesivă depinde de situație. Manevra poate oferi o schimbare în cursul, viteza, precum și cealaltă în același timp. Schimbarea cursului și viteza trebuie să fie semnificativă. Schimbările mici coerente în curs și viteza creează dificultăți în interpretarea informațiilor radar pe o navă concurență. Sub schimbarea vitezei, trebuie să se înțeleagă să reducă sau să oprească mașinile, deoarece creșterea vitezei în condiții de vizibilitate limitată este contrară regulilor.
Tabelul 18.2. Date tactice și tehnice ale unui radar de navigație

Manevra este doar o schimbare în curs este eficientă dacă schimbarea cursului este făcută în avans atunci când există suficient spațiu de apă și când această manevră nu provoacă convergență excesivă cu alte nave. Alegerea cursului cursului este oferită comandantului navei, cu toate acestea, regulile recomandă evitarea:
Se schimbă spre stânga când celălalt vas este în fața traversei, dacă acest vas nu este depășit;
Se schimbă în direcția navei situată pe traversă sau în spatele traversei.
Analiza situației și definirea elementelor de mișcare a țintei (ECD)
O analiză a situației care utilizează o tabletă manevrabilă se face după cum urmează (fig.18.1):Locul navei sale este considerat în centrul tabletei;
La rulmenți și distanțe, măsurate cu un radar după 1-2 minute, se aplică tabletei cel puțin două locuri ale țintă;
Prin punctele obținute M1, M2, M3 ține linia de mișcare relativă a LOP1;
Din centrul tabletei la Lod1, perpendicularul COP1 este redus, lungimea cărora este cea mai scurtă diferență în DKV.
Dacă DKP este mai mult doze, amenințarea cu apropierea excesivă (periculoasă) nu este. Alte calcule și manevre nu vor fi necesare până când țintă nu modifică cursul sau viteza.
Dacă DKP este mai mic doze, definiția EDC este determinată:
De la punctul de la vectorul vitezei vehiculului său VK;

Smochin. 18.1. O analiză a situației, definiția ECD și calculul manevrei discrepanțelor cu un singur scop pe tableta manevrabilă
- de la capătul vectorului VK, se efectuează o linie, o lodură paralelă pe această linie, vectorul vitezei relative ale VP a cărei a căror este calculat prin formula

- Conectarea punctului la capătul vectorului VR, se obține vectorul vitezei VM;
Timp rapid, cu vedere la cea mai scurtă distanță

Pentru a analiza situația și pentru a defini EDC pe o tabletă manevrabilă utilizând cardul "Palma", se efectuează următorii pași:
Tableta manevrabilă este plasată pe masă și coordonează amploarea intervalelor fixe de interval (NKD) cu cercurile de tablete;
Pe cercurile tabletei, distanțele inscriu și dezvăluie NKD;
Petreceți o linie a cursului navei pe tabletă (numărați nava în centru) și combinați-o cu un curs de marcare a imaginii;
Fixați tableta și aplicați locurile inițiale ale obiectivelor observate;
După 1-2 minute se aplică tabletei cel puțin două până la trei locuri din fiecare scop;
Conduce linii de mișcare relativă a fiecărui țintă.
Prin amplasarea lodului și a dimensiunii DKP, obiectivele cu care este posibilă o convergență excesivă. Prelucrarea ulterioară a informațiilor pentru calcularea EDC poate fi făcută, așa cum este indicat mai sus. Pentru a accelera primirea EDC, următoarea recepție este împinsă:
Tabletă cu obiective tipărite s-au mutat înapoi la rata de pe suma adoptată de navă în timpul observării distanței;
Aplicați obiective noi, schimbarea tabletei de fiecare dată tableta înapoi la rata distanței parcurse;
Prin conectarea la locul potrivit a obiectivelor, vectorii adevărata vitezei fiecăruia sunt direcționate din punctele anterioare la următoarele;
Amploarea vectorilor adevărați de viteză este calculată, ca de obicei, prin distanța și timpul observațiilor.
Metoda specificată este mai puțin precisă decât cea precedentă, dar vă permite să apreciați rapid situația la întâlnirea cu mai multe nave.
Dacă există o mișcare adevărată în modul Radar, este posibil să primiți EDC direct de la indicator și să detectați rapid schimbarea acestora. Cu toate acestea, pe indicatorul care rulează în modul adevărat de mișcare, definiția DKP și TKR este dificilă, prin urmare, pentru a determina cu exactitate aceste valori, este necesar să se deplaseze în modul de mișcare relativă.
Definiția ECD pe o hartă mare de (1: 50.000, 1: 25.000) este produsă în relațiile de navigație, unde calculul manevrei discrepanței poate duce doar la un curs periculos. În acest caz, navigatorul are ocazia să pună garnitura pentru sine și pentru țintă în mișcare absolută fără a se separa de situația de navigație. În cazul utilizării automatelor, există o oportunitate de a avea coordonatele actuale ale navei sale să păstreze o garnitură în mai multe scopuri și să respecte în mod clar situația.
Principalele dezavantaje ale metodei: incapacitatea de a determina rapid riscul de coliziune; Cea mai scurtă distanță față de obiectivul DKP direct de la garnitură nu poate fi obținută; Pe hartă puteți aplica doar punctul de intersecție a cursurilor adevărate. Prin urmare, simultan cu garnitura în mișcarea absolută, se recomandă analiza situației și calculelor la discrepanță pentru a produce pe o tabletă manevrabilă prin prefixul "Palma" cu verificarea discrepanței pe hartă.
Calculul și controlul manevrei discrepanței cu un singur scop pe o tabletă manevrabilă
Dacă există o amenințare de apropiere excesivă, adică atunci când DKP este mai mic decât DOS, trebuie să schimbați cursul sau viteza navei dvs., astfel încât obiectivul să meargă din centrul tabletei (punctele K) la o distanță mai mare de D03. Pentru a calcula manevra pe tabletă, se produc următoarele acțiuni (fig.18.1):Calculați și aplicați la LOD1 poziția preemptivă a scopului VC; Magnitudinea M3MC \u003d VRTC, unde tz \u003d 2--4 min, în funcție de antrenamentul operatorului;
Din punctul MC, tangenta la circumferința tabletei, corespunzătoare distanței predeterminate D03 și consiliului discrepanței; primiți o nouă linie de mișcare relativă a scopului LOD2;
Două triunghiuri noi de mare viteză sunt construite, pentru care, de la capătul vectorului VM, linia este efectuată în direcția opusă, lodul paralel2 (în figura 18.1 este arătat prin linia punctată), până la intersecția cu a cercul unei tablete care corespunde VK;
Din cei doi vectori ai QC "și KK" alegeți cea în care vectorul vitezei relative VP va fi mai mare în valoare absolută, iar rata CC "va duce rapid la o discrepanță cu scopul.
În mod similar, manevra se calculează prin schimbarea vitezei cursului. După întoarcerea la cursul calculat (viteza de schimbare) a observațiilor, obiectivul continuă și controlul manevrelor este controlat prin aplicarea locurilor țintă pe tabletă. Dacă locul de amplasare cade pe linia LOD2, manevra se efectuează corect. Dacă locul țintă M5, M6, M7 se afla pe linia Lod3, Lod2 paralel, aceasta înseamnă că rândul său a început mai devreme decât timpul calculat și că discrepanța va avea loc la distanță, mai mare D03. Schimbați direcția Lod, adică deplasarea locului de scop într-o singură direcție, indică o schimbare a EDC, care va necesita noi calcule.
Caracteristicile utilizării Hollc "Ocean"
Include radarul "ocean", există un dispozitiv de calcul care permite (după capturarea manuală a ecoului țintă) pentru a determina DKP, TKR și EDC. Precizia calculatorului se caracterizează prin următoarele valori:DKP este determinat cu o precizie de 2-3 cabină;
TCR este determinată cu o precizie de aproximativ 2 minute;
Cursul navei apropiate este determinat cu o precizie de 5-10 °, accident vascular cerebral - de la 0,5 la 1 tone.
Calculul, manevra de divergență se face pe o tabletă manevrabilă, așa cum este indicat mai sus. Dispozitivul de calcul vă permite să imitați manevra selectată (să-l "pierdeți în avans) și să estimați rezultatele posibile, în timp ce Lod este evidențiat pe ecranul Indicator.
Opțiunile principale pentru discrepanțe cu un singur scop sunt prezentate în § 23.11.
Calculul pe tableta manevrabilă a manevrei discrepanței cu mai multe goluri în același timp
O manevră discrepanță cu mai multe contra-nave este simultan cea mai dificilă, dar nevoia de a avea loc din ce în ce mai mult, în special în zonele de transport maritim viu. Până în prezent, metodele de calcul al acestei manevre se bazează pe utilizarea paletelor speciale, se ascund de operator semnificația fizică a manevrei și, prin urmare, nu sunt vaccinate pe flotă.Cel mai rațional este calculul cu construcția sectoarelor de cursuri relative periculoase (bucătar) propus de O. G. Morava. Calculul manevrei în metoda propusă se face după cum urmează (fig.18.2):
Cu detectarea pe ecranul de contracades (Obiectele nr. 1, 2, 3), acestea conduc pentru fiecare dintre ele o garnitură relativă pe o tabletă manevrabilă;
După efectuarea Lod2 și Lod3, pentru a dezvălui riscul de apropiere excesivă cu unul sau mai multe goluri, determină EDC (VM1, VM2_ și VM3);
Pentru țintă cu viteza maximă maximă (apropierea cu care DCR va avea loc mai devreme) Atribuiți momentul sosirii sale în poziția preemptivă și se aplică în acest moment poziții prezise ale fiecărei ținte de 1 mc, 2 mc, HP;
Din poziția pretenție a fiecărui scop, tangenții sunt efectuați de circumferința DOS, determinând sectorul periculos (OS) din fiecare țintă;
La sfârșitul fiecărui vector al vitezei adevărate a țintei VM1, VM2, VM3 construind un sector de cursuri relative periculoase;
Pentru o discrepanare sigură cu toate obiectivele, schimbați simultan cursul sau viteza, astfel încât capătul vectorului său de viteză VK să iasă din bucătar.

Smochin. 18.2. Calcularea unei manevre discrepanță cu mai multe goluri simultan pe o tabletă manevrabilă
În fig. 18.2 Se poate observa că o scădere a vitezei la valoarea V "K vă permite să vă dispersați cu toate obiectivele pe DKP mai mult Dow. Dacă sfârșitul vectorului său de viteză VV va fi pe frontiera COP-1, atunci discrepanța cu scopul nr. 1 va avea loc la distanța Dow și cu alții - la o distanță mai mare. Dacă sfârșitul vectorului său de viteză V "" K va fi în punctul de intersecție a laturilor Sok -2 și COP-3, apoi discrepanța de pe Dow va avea loc cu aceste două goluri și cu numărul de țintă 1 - la o distanță mai mare. Opțiunile calculate pentru discrepanțe sunt raportate de comandantul navei pentru a selecta și a aproba unul dintre ele . Sfârșitul manevrei de discrepanțe cu toate obiectivele poate fi considerat momentul de a veni ultimul la traversă relativă.
* În modul de funcționare automată, exactitatea definiției rulmentului și distanța dintre "oceanul" RLS la distanțe de până la 16 mile este de 0,5-0,7 ° și, respectiv, 30-40 m.
Redirecţiona
Cuprins
Înapoi
Garnitură pe o tabletă manevrabilă.
1. Garnitură adevărată.
O astfel de garnitură poate fi efectuată direct pe o hartă de navigație de călătorie pe scară largă sau o foaie de hârtie. Esența metodei este după cum urmează. După ce a găsit un semnal de ecou al unui alt vas de pe ecranul Indicator, acesta este determinat de rulmentul P1 și distanța D1, au lăsat cronometrul, au observat că nava T1, cursul joncțiunii sale de CN și numărătoarea inversă a lui Laga OL1. Localizarea ECHO A1 se aplică de-a lungul rulmentului și distanței față de locația sa, după selectarea scalei dorite (figura 1). După o anumită perioadă de timp (pentru calcule, intervalul în 3 sau 6 minute) se repetă observații (P2, D2, T2, OL2) și locațiile vasului lor 02 și vasul observat A2 sunt cauzate. După ce ați petrecut peste punctele A2 și A2, o linie dreaptă, obținem o linie de mișcare adevărată a scopului CC.
Prin distanța dintre punctele A 1 și A2 și timpul de T1 și T2, puteți determina viteza VC țintă și puteți calcula când și la ce distanță traversează cursul navei noastre și dpher.
Pentru a determina distanța dintre cele mai scurte convergențe a DKR și a timpului, TCR din punctul A2 este amânată la partea opusă cursului său, navigând vasul în timpul primei și celei de-a doua observații A2F \u003d O1O2. Segmentul O1C efectuat perpendicular pe linia care trece prin punctele A1, iar F va fi distanța dintre cele mai scurte convergențe. Localizarea instanțelor la momentul convergenței celei mai scurte (Punctele O1 și A4) poate fi găsită în mișcarea paralelă a segmentului de O1C la O4A4. Timp rapid pentru cea mai scurtă distanță

Pentru a determina circumstanțele întâlnirii și a elementelor mișcării unei alte nave, sunt suficiente două observații. Cu toate acestea, pentru a exclude ratele din observații și a se asigura că elementele celeilalte mișcări ale navei din perioada de observație sunt nevalabile, se recomandă creșterea numărului de observații. Găsirea celor trei ținte aplicate în timp în același timp (A1, A2, A3) Intervalul de timp (A1, A2, A3) pe o singură direcție și egalitate a distanțelor A1A2 \u003d A2A3 indică atât absența razei în observații, cât și nepulgarea Elementele mișcării țintă în timpul T1 până la T3.
Avantajele metodei de garnitură adevărată ar trebui să fie atribuite vizibilității sale. Dezavantajul este complexitatea relativă a construcțiilor grafice necesare pentru a determina principalele circumstanțe ale întâlnirii: distanța celei mai scurte apropiere și timp la el.
2. Garnitură relativă.
Această garnitură a câștigat pe scară largă, deoarece întrebările principale sunt rapid și ușor de rezolvat: cea mai scurtă distanță este procesul și după ce oră. Cu o stabilire relativă, circumstanțele întâlnirii și elementele mișcării țintă în sistemul de coordonate mobile, începutul cărora se ia în locația navei de observator. Aceasta corespunde imaginii reale pe care nava este observată pe ecranul indicatorului de mișcare relativă.
Din punctul de vedere al locului pentru locul navei sale, puneți-l pe P1 și P2 și P2 observat și distanța D1 și D2 (fig.2), prin punctele obținute A1 și A2 sunt conduse de Lod. Lungimea perpendiculară a sistemului de operare, coborât din punctul de mișcare relativă, este în distanța de scară selectată a celei mai scurte convergențe a DKR. Timp rapid pentru cea mai scurtă distanță


Cu o întindere relativă, distanța în care scopul va trece cursul navei noastre, de asemenea, determinat rapid. Pentru a face acest lucru, este suficient să măsurați distanța de op. (Dacă lod-ul trece în nasul nostru, determină punctul de intersecție a scopului cursului nostru și dacă lotul trece în feedul nostru - punctul intersecției vasului nostru, pentru care se desfășoară centrul tabletei cu o linie paralelă cu intersecția cu Lod). Timpul de intersecție al TPER va fi determinat prin adăugarea la mărturia ceasurilor navei la momentul găsirii locației semnalului de ecou la punctul A2 din intervalul de timp:

Este necesar să reamintim că, în primul rând, vesfodentul trebuie să determine principalele circumstanțe ale întâlnirii, adică DKR și TKR, și apoi definesc elementele mișcării țintă.
Adevărata mișcare a țintei este suma a două mișcări - rudă
Și vasul de observator sau
Având în vedere comutativitatea sumei vectorilor ![]() poate fi găsit
poate fi găsit
Doua feluri.
Construirea unui triunghi vector (vezi figura 2), indicat prin linii solide, este numit drept. Sub aceasta, începutul vectorilor de viteză (liniile de căi) așezate în direcția mișcării navelor este la un moment dat.
Se utilizează, de asemenea, o construcție inversă, în care vectorii care sunt amânați spre mișcarea instanțelor sunt convergați cu capetele lor la punctul comun (prezentat de linia punctată).
În viitor, vom folosi în principal construcția directă, deoarece este mai convenabilă atunci când se rezolvă sarcinile discrepanței.
Lungimea vectorului de mișcare a vasului trebuie să fie egală cu scala selectată de înot în timpul observațiilor luate pentru a construi un triunghi vectorial. Lungimea vectorului țintă obținută corespunde înotului țintă în timpul observațiilor.
3. Tabletă manevrabilă.
O tabletă manevrabilă este o grilă de coordonate polare. Pentru a accelera așezările asociate cu înotul vasului în timpul observațiilor, o scară logaritmică este plasată pe o tabletă manevrabilă. Este construit după cum urmează: Pe o pornire dreaptă de la punctul de plecare pe o scară, segmentele sunt amânate egale cu logaritmii zecimal ai numerelor de la 0,1 la 60 și digitizate în valorile acestor numere. Deoarece în termen de 60 de unități de acțiune cu minute sunt similare cu acțiunile cu numere într-un sistem zecimal, orice eșantion pe scară poate fi atribuit numele "timp", "distanța" sau "viteza" și în valorile bine cunoscute ale doi dintre ei să găsească al treilea, rezolvând proporția
https://pandia.ru/text/80/090/images/image012_74.gif "width \u003d" 331 "înălțime \u003d" 26 "\u003e
Atunci când se utilizează o scală logaritmică, trebuie să vă amintiți că picioarele "de sus" ale circulației (instalate pe numere mari) arată întotdeauna timpul și "inferior" (instalat pe numărul mai mic) - viteza și distanța.
Din observațiile există o mișcare relativă a mărcii - 2,2 km în 8 minute. Găsiți o viteză relativă.
Am pus piciorul de jos al circulației pentru diviziunea 2.2, iar partea superioară - pe diviziunea scalei "8";
fără a schimba soluția circulației, deplasați piciorul de sus al circulației pentru a împărți scara "60". Piciorul inferior al circulației va arăta viteza relativă VO \u003d 16,5 UZ.
t \u003d 17 min, v \u003d 15 uz. Găsiți distanța S.
Am pus picioarele superioare ale circulației pe diviziunea "60", cu atât mai mică - pe "15";
fără a schimba soluția circulară, mutăm picioarele superioare ale circulației pentru a împărți scara "17". Piciorul inferior al circulației va arăta distanța S \u003d 4,3 km.
Cu V \u003d 17, vasul a trecut S \u003d 8,7 mile. Determinați timpul pentru care nava trece această distanță.
Am pus picioarele superioare ale circulației pe diviziunea "60", iar partea de jos - pe diviziunea scalei "17";
fără a schimba soluția Zircule, punem piciorul de jos al circulației pentru împărțirea scalei "8.7". Picioarele superioare ale circulației vor afișa timpul t \u003d 31 min.
4. Alegerea și justificarea manevrei pentru discrepanțe într-o anumită distanță.
Dacă DKR.< Dзадто необходимо предпринять маневр для расхождения с судном-целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию и выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя tкр, VO и Dзад, выбирает время начала маневра. Последующая графическая прокладка служит для проверки безопасности выбранного маневра и уточнения его величины.
Garnitura grafică pentru justificarea manevrei discrepanței într-o anumită distanță este prezentată în fig. 3. Se efectuează în următoarea secvență:
pe LoD pentru timpul estimat al manevrei sau pe distanța dorită a manevrei, punctul locației țintă în momentul începerii manevrei discrepanței;
o răsucire mentală a vectorului sau schimbarea lungimii sale în conformitate cu vizualizarea selectată a manevrei determină partea de inversare a duratei de viață a manevrei;
de la punctul M cheltuiesc pe tangentul Dzad-ului Olod, în timp ce dintre cele două posibile tangente la DVAD, se desfășoară cea care corespunde părții inversării lodului cu forma aleasă a manevrei;
prin capătul vectorului, paralel cu cei mai în vârstă în direcția opusă direcției celor mai în vârstă, se efectuează vectorul noii viteze relative;
dacă manevra este selectată prin schimbarea cursului, noua direcție a vectorului de viteză a velocitiei este inversată în jurul punctului O1 înainte de intersecția cu vectorul noului vector de viteză relativ; unghiul dintre vectori și va determina unghiul dorit al lungimii de undă;
dacă manevra este selectată viteza, noul vector de viteză al observatorului este egal cu vectorul vectorului din punctul O1 la noua linie de viteză nouă;
dacă o manevră combinată este selectată printr-un curs și viteză, apoi găsiți un nou curs al vasului de observator din jurul punctului O1, vectorul vectorului vasului de observator este redus în conformitate cu accidentul vascular cerebral estimat.

5. Contabilitatea inerției navei.
La rezolvarea problemelor din capitolele anterioare, sa presupus că nava își schimbă instantaneu elementele mișcării și ale lodului în timpul manevrei, își schimbă brusc direcția spre sămânță. De fapt, este, desigur, nu așa, și trebuie luată în considerare inerția navei.
Contabilitate de circulație.
În conformitate cu NSHP-82, elementele de rotire sunt prezentate în tabelul elementelor de manevrabile sub forma unui grafic și a unei mese atunci când circulă dintr-o întoarcere completă din partea dreaptă și din stânga a mărfurilor și în balast cu poziția de Volanul de direcție "" la bord "" (\u003d 35 °) și "pe absolvent" (\u003d 15 ÷ 20 °). La rezolvarea sarcinilor acestui capitol se presupune că se vor folosi diagramele de circulație prezentate în figură. 4 pentru manipularea volanului \u003d 20 °. Ar trebui să se țină cont de faptul că parametrii circulației efective a navei pot diferi semnificativ de la masă, în funcție de viteza de viteză, de aterizare (roll și diferențial), precipitații și raportul de adâncime, direcția și rezistența vântului și entuziasmului.

Când cursul este schimbat de către vasul-observator (fig.5), în raport cu locația țintă va fi deplasată de-a lungul traiectoriei curbilineare de la punctul M1 pe Lod (în momentul începerii manevrei navei vrăjitorului) la punctul F la vechi (la capătul manevrei). În viitor, scopul este mutat de un exploatat la o distanță de o adevărată mișcare relativă a scopului va fi mai dificilă. Datorită scăderii vitezei navei-observator asupra circulației agentului nu va fi paralelă cu vectorul V01 până când vasul nostru apelează viteza inițială a cursei. În acest caz, scăderea vitezei circulației compensează parțial. În multe cazuri (de exemplu, atunci când discrepanțele cu un contract), datorită scăderii vitezei de observare a navei la rândul său de https://pandia.ru/text/80/090/images/image016_68.gif "Width \u003d" 600 "Înălțime \u003d" 369 "\u003e
1. Metoda cursului intermediar relativ.
Din stabilirea grafică, se găsește colțul necesar cursului; Din tabelul elementelor de manevră la colțul Weagle, timpul petrecut de navă la rândul său, TMAN; un unghi al cursului intermediar și înotul intermediar al SPR; Din punctul de poziție a țintei la momentul începerii rotației este amânată în timpul turnului; De la capătul vectorului până la lateral, cursul intermediar invers, navigația intermediară a SPR este amânată; Prin începutul vectorului SPR, un explorator este realizat în paralel.
Metoda este corectă, dar consumatoare de timp. La rezolvarea sarcinilor discrepanțelor pe podul vasului nu se aplică. Se utilizează în pardoselarea accidentelor și ca referință la evaluarea acurateței metodelor aproximative.
2. Metoda punctului condițional pre-dot.
Ooda este realizată din punctul de vedere al țintei M1 la momentul începerii manevrei și de la punctul de prevenire condiționat M, se referea la LOD înainte pentru momentul instrumentului de la Tper. În prima aproximare, jumătate din timpul de rotație durează jumătate din timp. Astfel, cu metoda luării în considerare a circulației, rotația vasului observator începe pe tper ~ 0,5 TMAN mai devreme decât ținta vasului ajunge la punctul din care a fost condusă mai în vârstă.
Metoda este cel mai adesea aplicată în practică. Mai precise pentru contra-obiective și mai puțin exacte pentru obiectivele care merg pe cursuri convergente. Nu se aplică atunci când feed-ul navei prin satelit se rotește, deoarece în acest caz V0 \u003d 0 și cu orice punct TPR și M1 coincid.
3. Metoda de introducere a amendamentelor la DZAD.
Așa cum arată calculele, atunci când cursul navei de observator se schimbă, un unghi de până la 90 ° în erorile Dzad datorită inerției rotației nu depășește raza de circulație tactică. La unghiuri mari, întoarcerea atinge diametrul de circulație. În această metodă, Dzadnakovatează o marjă la o eroare maximă posibilă din circulația inacceptabilă. Această metodă este cea principală atunci când se rotește sub pupa unui vas potențial periculos, care este paralel sau aproape un curs paralel.
Inerția contabilă atunci când viteza de manevră.
Caracteristicile și navele inerțiale în conformitate cu NSHS-82 sunt prezentate sub forma unui program construit pe o scară constantă a distanțelor și având o scară de valori de timp și viteză. La rezolvarea sarcinilor acestui capitol, se presupune că informațiile privind caracteristicile frânei de inerție ale navei cu o deplasare de aproximativ 10.000 de tone (vasul I) și vasul cu deplasare de aproximativ 60.000 de tone (vasul II), administrat în apendicele I .
Atunci când viteza este schimbată de navă, locația relativă a țintei se va deplasa de-a lungul unei traiectorie curbilineară, a căror curbură este treptat scăzând ca vasul său este eliberat la o nouă viteză constantă. Erori de la inerția inectuală atunci când viteza de manevră poate ajunge la câteva mile de aici importanța contabilității inerției. Atunci când manevra, viteza de pe vasul de tonnant mare, noua viteză a vasului de observator este instalată prin zeci de minute și tot timpul țintă se mișcă de-a lungul lodului curbei - de aici complexitatea contabilității inerției.
Contabilitatea inerției este posibilă în următoarele moduri.
1. Metoda de construire a unei curbe exploratorii.
Traiectoria relativă a mișcării navei poate fi găsită prin construirea de triunghiuri de călătorie pentru intervale de timp secvențiale T1, T2, ..., TN, după manevra SO (Ti) \u003d SZ (TI) - SN (TI)
Pentru a construi o curbă aldoor (figura 6):
din punctul de vedere al locației Delhi la momentul începerii manevrei navei noastre, pentru a petrece ținta cursului cursului și a nota segmentele de pe ea permise prin anumite intervale de timp, de exemplu, la fiecare trei minute ( Punctele B1, B2, ..., BN); Din punctele BI pentru a ține liniile spre partea laterală, cursul invers al vasului de observator și pentru amânarea segmentelor acoperite de observatorul vasului în timpul corespunzător după manevră (punctele C1, C2, ..., CN ); Prin punctele CI pentru a efectua lodul curbei și a determina DKR ca cea mai scurtă distanță de centrul tabletei la curbă.

Motivul este corect și vizual, dar intensiv de muncă. Această metodă rezolvă numai sarcina de a previziune DKR nr la manevra selectată, dar problema nu este rezolvată pe găsirea schimbării necesare a vitezei pentru discrepanțe într-o anumită distanță. Pentru a rezolva problemele în condițiile podului nu se aplică. Utilizate în parilația accidentelor, precum și ca o referință pentru a estima acuratețea inerției aproximative.
2. Metoda de introducere a amendamentelor la DZAD.
Dacă, ca măsură a inerției navei, adoptați caracteristica TV (televizorul caracteristic inerțial este numeric egal cu viteza jumătății vitezei la Menvra Stop..gif "Lățime \u003d" 106 "Înălțime \u003d" 24 src \u003d "\u003e . GIF "Width \u003d" 67 "Înălțime \u003d" 22 "\u003e GIF" Lățime \u003d "34" Înălțime \u003d "22 src \u003d"\u003e nu depășește 3 kB. În acest caz, DVAD poate fi atribuit unei rezerve pentru Eroare maximă posibilă. Această metodă poate fi principala navă cu deplasare la 1000 de tone.
3. Metoda punctului de premisă condiționată (figura 7)
În același timp, o nouă viteză de viteză stabilită este amânată în triunghiul vitezei din triunghiul vitezei, dar Ooda se desfășoară din punctul de vedere al țintei la momentul începutului manevrei și de la pre- -MP punctul M, referit la jurnalul înainte pentru timpul prematur al TPER. În prima aproximare, jumătate din timpul pentru care este stabilită noua viteză a navei sale. Astfel, cu metoda de luare a inerției, echipa de progres este dată pe TUPR ~ 0,5 TMAN mai devreme decât vasul este ținta ajunge la punctul de la care a fost realizat mai vechi. Odată cu alegerea corectă a progresului, progresul va avea loc pe traiectoria de semnal efectivă a ecoului.

În acest caz, metoda de luare a inerției este considerată condiționat că în timpul TPER, vasul vasului anterior este menținut (în timp ce calea călătorită este supraestimată), iar după noua viteză a VN1 este instantaneu instantaneu (în același timp Calea a trecut). După cum se poate vedea din fig. 8, optimă va fi optimă pentru a fi un timp de impact, în care supraestimarea căii călătorite în cadrul TEPR este compensată prin subestimare ulterioară. Aceasta corespunde egalității zonelor umbrite din fig. opt.

În fig. 9 Oferă informații despre alegerea timpului de execuție optim, în funcție de manevra selectată (VN1 / VN \u003d 0 - STOP, VN1 / VN \u003d 0,5 - mph, etc.) și caracteristicile televizorului de inerție. Pe baza acestor informații la începutul zborului, poate fi compilată o masă de lucru a timpului prematur.

Nava are un TV caracteristic inerțial \u003d 4 și are următoarea gradare a ratelor de PPH 14 UZ, SPK 10 UZ, MPH 8 UZ, SMPH 5 UZ. Faceți o masă de lucru a timpului de execuție.
PPH - SPX. Vn1 / vn \u003d 10: 14 \u003d 0,71. Din graficul din Fig.9 TUPR / TV \u003d 0,8; TPR \u003d 0,8 * 4 \u003d 3,2 ~ 3 min. După calcularea în mod similar pentru VN1 / VN \u003d 0,57; 0,3; 0, ajungem pentru manevra ratei de viteză din cursa deplină.
SMPH, opriți-vă. |
|||
4. Modul de metodă.
În acest caz, metoda de încorporare a inerției în triunghiul vitezei este amânată nu o viteză nouă a vasului și o viteză medie (echivalentă) în timpul începerii manevrei până la cea mai scurtă convergență  Prin capetele vectorilor VCP și VC, vectorul vitezei relativi mijlocii se efectuează și OLODSR este efectuat de la punctul M (figura 10). De fapt, semnalul ECHO se va deplasa de-a lungul curbei de linie situată între Lod și Oodsr Convex în direcția LoD și, în punctul de convergență a intersecțiilor Olodsr.
Prin capetele vectorilor VCP și VC, vectorul vitezei relativi mijlocii se efectuează și OLODSR este efectuat de la punctul M (figura 10). De fapt, semnalul ECHO se va deplasa de-a lungul curbei de linie situată între Lod și Oodsr Convex în direcția LoD și, în punctul de convergență a intersecțiilor Olodsr.

În prima aproximare, media aritmetică medie dintre vechime și cea nouă poate fi acceptată ca viteză medie.
![]()
Cu un timp mic până la cea mai scurtă apropiere (), eroarea nu depășește 10% din eliberarea navei atunci când frânarea liberă.
Mai precis, viteza medie poate fi găsită din tabelul de contabilitate inerție universală dată în Anexa 2. Utilizarea unei mese de contabilitate a inerției universale ia în considerare în exemple.
Găsiți viteza medie a navei I în timpul începutului manevrei PPC - MPH până la cea mai scurtă apropiere dacă TKR \u003d 20 de minute.
Din diagramele căilor de frână ale navei I (apendicele 1) pentru viteza de 16, găsim TV \u003d 4 min. În tabelul universal al inerției Contabilitate în coloana TV \u003d 4, găsim cel mai apropiat TKR \u003d 22 min și în linia corespunzătoare pentru invers 0,5 VN obținem VSR / VN \u003d 0,6. Viteza medie poate fi amânată în triunghiul vitezei de către ochiul de 0,6 segment VN sau, dacă este necesar, traduceți în noduri VC \u003d 0,6 * 16 \u003d 9,6 UZ.
Conform rezultatelor garniturii radar, sa obtinut ca pentru discrepantii cu scopul in DVAD, este necesar ca VSR ~ 0.5VN. Olodsr și Vo Wed au determinat timpul de la începutul manevrei până la cea mai scurtă convergență a TKR ~ 20 min. Caracteristicile inerțiale ale vasului TV \u003d 8 min. Ce viteza de manevră trebuie luată pentru a se diferenția pe Dzad?
În tabelul universal de inerție contabilitate în coloana TV \u003d 8 min, găsim TKR \u003d 19 min și în linia corespunzătoare caută cea mai apropiată valoare VCR mai mică. În acest caz, VCR \u003d 0.5VN este situat în coloana Stop. Pentru discrepanțe cu scopul Dzad, este necesar să se ofere "oprire". În coloana adiacentă vedem că vt / vn \u003d 0,25, adică, de fapt, până când viteza va fi de 0,25 VN.
Apendicele 1a.
Navă am deplasarea de aproximativ 10.000 de tone.
https://pandia.ru/text/80/090/images/image033_47.gif "lățime \u003d" 423 "înălțime \u003d" 442 src \u003d "\u003e
Apendicele 2.
Tablet manevrabil
mijloace pentru mecanizare mică pentru soluționarea grafică a problemelor de manevrare liniară. Se utilizează atât în \u200b\u200bmanevrarea combaterii (ocuparea poziției de utilizare a armelor, apropierea de o anumită distanță, evaziune din ședință și o altă sarcină) și atunci când discrepanțele cu instanțele din mare.
- - 1) Board Menzula, care servește ca tabel pentru tragere la filmare; 2) o foaie de hârtie lipită pe Menzulu, planul zonei detașabile este aplicat la cuptor; 3) o foaie separată de card topografic ...
Dicționarul de cale ferată tehnică.
- - un dispozitiv cu o suprafață plană specială și un dispozitiv care indică coordonatele imaginii pentru intrarea lor în ...
Scurt dicționar explicativ privind imprimarea
- - Engleză: regim manevred Modul de funcționare a unei centrale electrice cu putere variabilă în intervalul de timp setat Sursa: Termeni și definiții în industria energiei electrice ...
Dicționar de construcție
- - manevrabil, oh. Manevra f. 1. Rel. la manevra; destinate lor. Locomotiva de abur manevrabilă. Bas-1. 2. Conducerea fără fortificații pe termen lung. Despre operațiunile militare. Războiul mobil. Apărare manevrabilă. Bass-1 ...
Dicționarul istoric al limbajului rusesc Gallicalism
- - Maswarm și ...
- - Și ...
Dicționarul orfografic al limbii rusești
- - -Th. 1. Făcut cu utilizarea manevrelor, fără fortificații pe termen lung. Războiul mobil. 2. Cauzatibilă pentru a schimba rapid direcția de mișcare. M. CRUISER. Tactic tactic. | Sud. Meniavrosis, -I, soții. ...
Dicționarul explicativ al Ozhegov
-
Dicționar explicativ ushakov.
- - manevrabil și mawed, manevrabil, manevrabil. Conducând fără fortificații pe termen lung; furnică. poziționarea. Mobile Warfare ...
Dicționar explicativ ushakov.
- - manevrabile manevrabile, manual adj. 1. Făcut cu utilizarea manevrelor, fără fortificații pe termen lung. 2. Posedarea capacității de a manevra 1 ....
Efremova dicționar Efremova.
- - Arr. 1. Făcut cu utilizarea manevrelor, fără fortificații pe termen lung. 2. posedând capacitatea de a manevra. // Contribuția la schimbarea rapidă a direcției de mișcare. 3. Constituvați. Proiectat pentru manevre ...
Efremova dicționar Efremova.
- - Aya, una. 1. Armatei. Efectuate cu utilizarea largă a manevrei, fără fortificații pe termen lung; Antip. poziționarea. Mobile Warfare ...
Dicționar academic mic.
- -; scurt Formați -en, -nna și bărbați "Eurahored; scurt ...
Dicționar de ortografie rusă.
- -; Mobile Warfare ...
Accentul verbal rusesc
- - ...
Formați cuvintele
- - mobil, mobil; Întoarcerea, înaltă, răcoritoare ...
Dicționar sinonim.
"Tabletă manevrabilă" în cărți
Manevrabilă "Filin"
Din cartea geniului "Fokke-Wulf". Mare rezervor kurt. Autor Azheliovici Leonid Lipmanovich.Manevrabil "Filin" rezervor Kurt convins să-și dea inteligența un nume nou: "Filin". Philin este în natură mai mare decât bufnițele și o păsări mult mai teribile de pradă. Leagănele aripilor sale depășesc o jumătate de metri. Filus zboară complet în tăcere și, cel mai important, posedă unic
Piele galbene de comprimat
Din carte "Nu plângeți despre noi ..." Autor Kachaev Yuri Grigorieievich.Tableta de piele galbenă sa întors acasă, Nina Elistratov a aflat că Yuri, împreună cu Murat și Leva Akimov, au mers în oraș. Fiul a lăsat o notă pe masă, a fugit în cuvinte: "De la vânătoare va veni târziu. Nu vă faceți griji ", cum ar fi spuneți, nu vă faceți griji când cei opt în curând și cu
Departamentul de Baie: Tablet în nori
Din cartea computerului PDA N138 (01.10.2011-07.10.2011) Autor Compoziția "Computerra"Departamentul de cadă: Tablet în nori Autor: Baie Mikhailopublicat 05 octombrie 2011. La sfârșitul lunii septembrie 2011, Amazon a prezentat tuturor producătorilor de comprimate o pilulă bună, sau, mai precis, o tabletă. (Cum altfel ar trebui să traduci comprimatul de cuvinte Aglitskoe?) În rolul
Calculator și comprimat
Din carte șapte abilități ale părinților efectivi: gestionarea timpului de familie sau cum să gestionați totul. Carte de instruire de Heinz Maria.Credeți că computerul și comprimatul, înțelegeți că computerele și comprimatele au intrat în serios și pentru o lungă perioadă de timp. Nu trebuie să fiți un prunerat pentru a observa tendințele în înlocuirea tehnologiilor vechi de hârtie interactivă. Se opune acestei tendințe - nu-mi pasă ce să rezist
Manevrabile de mare viteză Biplane - câmpul de luptă al avioanelor
Din cartea aeronavei de furtună a Armatei Roșii. Volumul 1. Formarea aspectului Autor Perov Vladimir Ilyich.Manevrabil de mare viteză Biplane - un avion de luptă în paralel care lucrează în paralel la modificarea aeronavei de informații seriale în aeronavele de atac de lumină și crearea unei "aeronave militare" printre o parte din specialiștii Forțelor Aeriene ale Armatei Roșii au primit amploarea teoriei atacului
Colonelul comprimat
Din cartea autoruluiTableta colonelului din fața noastră este revelațiile publiciiste și poetice - analize operaționale și schițe cu "natura" ... avem nevoie de ele să înțeleagă trecutul nostru cu experiența de astăzi. Să vă amintiți cu tinerii. Și mai departe. Ei sunt interesați de soarta autorului - militar
Tableta
De la carte mare enciclopedia sovietică (pl) autor BVB.IFA 2010: Odată comprimat, două tablete Andrey scrise
Din cartea Digital Magazine "Computerr" numărul 33 Autor Compoziția "Computerra"IFA 2010: Odată comprimat, două tablete Andrei scrise publicate Posteri scrie computere tablete expuse cu mult înainte de Apple iPad, dar cu apariția lui în lumea lor totul sa schimbat semnificativ. Acum, înainte de dezvoltatori, se pare că a ieșit că tableta nu este
Alegeți o tabletă modernă
Din cartea calculatorului PDA N148 (12/03 / 2011-09.12.2011) Autor Compoziția "Computerra"Alegem un comprimat modern Postat de: Oleg Nechazublish 6 decembrie 2011 Aspectul pe piața de tablete iPad a fost îndeplinită de publicul cu plăcere, mulți surprinzător toți ceilalți producători de laptopuri. Faptul este că comprimatele touchscreen serial
Departamentul de Cadă: Tablet și Desktop
Din cartea calculatorului PDA N137 (09 / 24/2011-30.09.2011) Autor Compoziția "Computerra"Departamentul de Cadă: Tablet și Desktop Autorul: Baie Michaelopublicată pe 27 septembrie 2011 Vara în Print, în principal America de Nord, din nou au fost numeroase previziuni pentru mormântul calculatorului personal Classic Desktop. Ridicați K.
Din cartea autoruluiPerioada de război manevrabilă - Operațiuni în partea germană-austriacă: Bătălia Galicia și Operațiunea Prusiană de Est
Din cartea autoruluiPerioada de război manevrabilă - Operațiuni în partea germană-austriacă: Bătălia Galicia și Operațiunea Prusiană de Est
Din cartea autoruluiPerioada de război - Operațiuni de război în frontul germano-austriac: Bătălia Galicia și Operațiunea Prusiană de Est Înainte de prima călătorie în Prusia de Est, marele prinț Nikolai Nikolayevich a declarat disponibilitatea de a începe să se deplaseze pe Berlin la patru armate: primele două
Perioada de război manevrabilă - Operațiuni în partea germană-austriacă: Bătălia Galicia și Operațiunea Prusiană de Est
Din cartea autoruluiModel "Tablet"
Din carte un cadou de carte, o regină decentă de frumusețe Autor Kriksunova Inna Abramovna.Modelul tabletei este o pungă rigidă sub forma unui dreptunghi întins vertical. Punga de tabletă are o supapă de zbor, complet sau parțial agățată de sac, în partea de jos a acestei supape este blocarea dispozitivului de fixare. Această pungă de model este purtată pe o lungă perioadă de timp
 Dispozitivele de iluminare bazate pe LED-uri alternative curente își găsesc nișă și pot ieși dincolo de limitele sale.
Dispozitivele de iluminare bazate pe LED-uri alternative curente își găsesc nișă și pot ieși dincolo de limitele sale.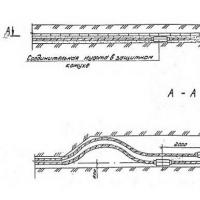 Cerințe și rate pentru stabilirea cablurilor în domeniul de aplicare al Pământului, definiții
Cerințe și rate pentru stabilirea cablurilor în domeniul de aplicare al Pământului, definiții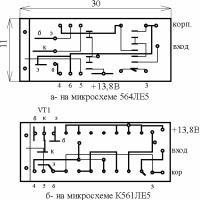 Stroboscopul de automobile din pointerul laser
Stroboscopul de automobile din pointerul laser Comanda 20 UAH la cont. Cum să împrumutați pe MTS. Informații suplimentare despre serviciu
Comanda 20 UAH la cont. Cum să împrumutați pe MTS. Informații suplimentare despre serviciu Cum să verificați reaprovizionarea contului
Cum să verificați reaprovizionarea contului Cum să obțineți un împrumut la Tele2?
Cum să obțineți un împrumut la Tele2? Responsabilitate SSD pe un consiliu miniatural Ce achiziționează SSD
Responsabilitate SSD pe un consiliu miniatural Ce achiziționează SSD