Az eltéréshez vezető radar használata. Egy példamutató akció algoritmus manőverezésre, amikor egy manőverezhető tabletta manőverezhető tabletta, hogyan kell mérni a sebességet
Dokumentum típus: Eszközkit | Doc.
Népszerűség: 0,23%
Oldalak: 16.
Nyelv: Orosz ukrán.
A közzétételi év: 2005.
Módszert a Vkazіvki Traca Vincannya Roboti RLOB З Disciliplin "Trapher Experience і Zarp" a hallgatók 4. tanfolyama a távollétében Ukrajnában Intionary specimlіst 7.100301
Minden hallgató az opció szerint 5 feladatot végez manőverezhető tabletta formájában, és két kérdésre válaszol egy külön lapon. Formájának mozgékony tabletta megoldott feladatok és megtalálja a választ, tápláljuk egy külön mappába.
A tesztmunka verziója a személyes titkosítás utolsó számjegyének megfelelően van kiválasztva.
Lehetőség A kérdések száma
1 1, 11, 21, 31, 41 1, 11
2 2, 12, 22, 32, 42 2, 12
3 3, 13, 23, 33, 43 3, 13
4 4, 14, 24, 34, 44 4, 14
5 5, 15, 25, 35, 45 5, 15
6 6, 16, 26, 36, 46 6, 16
7 7, 17, 27, 37, 47 7, 17
8 8, 18, 28, 38, 48 8,18
9 9, 19, 29, 39, 49 9, 19
10 10, 20, 30, 40, 50 10, 20
A vizsgálati munkák illetékes végrehajtása érdekében meg kell vizsgálni az MPPS-72 5., 6., 7., 8., 9., 10. szabályait, valamint rövid módszertani utasításokat a manőverezhető tabletták grafikai megoldására.
A Test Munka mappa címlapján adja meg a hallgató nevét, keresztnevét, patronizmust, személyes titkosítási számot, fegyelmi nevet, tanfolyamot, opciós számot, specialitást.
Az előírt időszakban végzett munkát továbbítják a tanár ellenőrzéséhez.
A hallgató megengedett, hogy tesztelje az ellenőrzést és a laboratóriumi munkát.
Rövid módszertani utasítások a manőverezhető tabletta feladatai grafikai megoldására.
Az eltérés problémájának megoldására szolgáló eljárás egy hajóval
mozgatható tabletta
(Lásd: 1. függelékek, 2)
A korlátozott láthatóság feltételei az úszás különleges feltételei, ezért a "Radar szimulátor" fegyelem és a "SARP szimulátor" azt sugallják, hogy ezekben a körülmények között első úszás van.
Amikor a nyílt tengeren korlátozott láthatóságú úszás, a radarok áttekintése elsősorban a skála mérlegeken történik, és ez a távolság valószínűleg a legtöbb edény kimutatásának távolsága.
Jó tengeri gyakorlat, hogy megoldja az eltérések problémáját a nyílt tenger bíróságával, azt ajánlja, hogy az RLS-képernyőt három zónába osztja:
1) A helyzet értékelő övezete 12-8 mérföldre, ahol az ütközés kockázatának mértéke, a közeledő hajók mozgásának párosítása meghatározza, és a manőver elveszíti;
2) manőverező zóna 8 és 4 mérföld között. Az eltérésekre vonatkozó intézkedések ajánlottak a lehető leghamarabb az ütközés kockázatának megteremtése után;
3) A túlzott közeledés zóna 4 mérföldre. A hajó visszhangja előtt e zónában a nyílt tengeren való eltérés manőverét el kell fejezni, hogy a hajók helytelen manővereinek eredményeképpen megváltoztassák a helyzetet, az ütközés kockázatának megszüntetése érdekében idő és tér volt.
Amikor a kiváltságos bíróságok korlátozott láthatóságának feltételei mellett úszás, nincs kötelessége megakadályozni az ütközést, és az alábbi prioritásokat minden edényre vonatkozóan RLS-vel kell megadni.
1. Forgatás jobbra;
2. A sebesség csökkentése;
3. Hajómegálló;
4. Forgassa balra.
A manőverezhető tabletta (szituációs tabletta) és a SARP használatával kapcsolatos eltérések megoldásának fő feltételezése a saját hajó és más hajók mozgásának paramétereinek (tanfolyamok és sebességek) változhatatlansága az információkészlet időtartamára és a probléma megoldására.
A pillanat elkezdte megoldani a problémát - az eltérés kezdetének pillanatát, a "nulla pont" az idő, hogy eltávolítja az első hivatkozás az irányt, és az első célt.
Visszatérési idő a saját hajó mozgásának kezdeti paramétereihez az eltérés vége.
Amikor a radar be van kapcsolva, helyesen módosítani kell a vevő fényerejét és javítását, és szükség esetén csökkenteni kell az izgalom és a csapadék interferenciájának hatásait.
Az eltérés problémájának megoldására irányuló eljárás egy manőverezhető tabletta:
1) A tabletta közepétől tartsa a vektorát a saját hajójának 6 perc alatt, Vn.
2) Bejegyzéseket készítsen a radarinformáció feldolgozóasztalában a saját hajó tanfolyamáról (Cn) és sebesség (VN) révén.
3) A tabletta közepétől Dzad sugárral. Kör. Ajánlott korlátozott láthatósággal, hogy vegye figyelembe a nyílt tengeri Dzad körülményeit. \u003d 1,5 ÷ 2 mérföld, és a DVD-k szűk vizein. \u003d 0,5 mérföld.
4) Az RLS képernyőn való helyzet figyelése a relatív poláris koordináták (Δp ≈ 0 és ΔD 5) változása az RLS képernyőn, hogy eltávolítsa az ECHO veszélyes edényének csapágyát és távollétét, indítsa el a stopperóra, Figyelje meg a hajó idejét, jegyezze fel a rekordokat a feldolgozóasztal radarinformációban a nulla időpontban 0 ا, hordozó és távolság az A. hajó számára.
6) Ezeknek az adatoknak megfelelően helyezték el a kezdeti helyzetet a manőverezhető tablettára, hivatkozva a 0 oszlop nulla pontszámára és az A nagy betűre.
7) A párhuzamos vonalzó használata a saját hajó mozgatásának vektorát 6 percen belül a nulla pontba, és elkezdte kijelölni az F betűt (fix), a vektor kijelöli a VN betűt.
8) Végezze el a kör egy részét a nulla pont területén, jobbra és balra (vagy körbe) a VN sugarával az F középpontból, amely felgyorsítja a probléma grafikus megoldását.
9) A 6. percben távolítsa el a csapágyra és az ugyanazon edény visszhangját, és írja be őket a radarinformációk feldolgozásának táblázatába.
10) A kapott adatok szerint 6 perces pontot kell alkalmazni egy manőverezhető tablettára, jelezve, hogy egy 6-os számmal.
11) Csatlakoztassa a nulla és 6 perces pontot, hogy 6 perc alatt meghatározza a relatív célmozgásválasztást. A vektor nyíl egy 6 perces pontra irányul. Jelzi ezt a vo.
12) Húzza ki a vektor vo-t a tabletta központjához, kapunk egy log - egy olyan pályát, amely a hajó visszhangját és a tanfolyamok és a saját és ellencsévek arányát mozgatja.
13) A naplón lévő tabletta középpontjából távolítsa el a merőleges és távolítsa el a DCR értéket.
14) Határozza meg a vo grafikus vektort a nulla ponttól a DCR vonal merőleges vonalának alapjához a TKR hajók legrövidebb konvergenciájához.
15) A DCR és a TKR rekordjának eredménye a manőverezhető tabletta.
16) Csatlakoztassa az F pontot egy 6 perces ponttal közvetlenül, 6 perces célvektor VC-t kapunk, 6 perces ponton irányítva, jelölje ki vc.
17) párhuzamos vonalzóval és mérővel, hogy meghatározzák az igazi pályát és a hajó-cél sebességét, felvételeket készítve manőverezhető tabletta;
18) Alkalmazza a preemptatív pontot (12 percet ajánlott, figyelembe véve az időállomási időt (TN.I. \u003d 6 perc, a tr.z. \u003d 3 perc problémájának megoldása) és 3 perc. És töltsön be pontozott vonalakat a dzad sugarának köréből. Szerezzünk olyan falvakat, amelyekhez a hajó visszhangjainak mozognak, amikor manővert végeznek. Az ölében az oldalirányú az edényből marad, és fordítva.
19) egy 6 perces pontot költeni a párhuzamos egyenes évvel az ellenkező irányba, hogy meghatározza a veszélyes tanfolyamok szektor (lé), amelyen túl kell visszavonja a végén a VN vektor, hogy megoldja a problémát a különbség. Ha az F pont a gyümölcsléen belül van, lehetetlen megoldani a probléma problémáját a sebesség csökkenésével.
20) Válassza ki a hatékony eltérés manővert biztonságos távolságban, és a tanfolyam és / vagy sebességváltozás meglehetősen nagynak kell lennie ahhoz, hogy a közeledő hajó észrevegye. Az esztergálás manőver, általában jobbra, legalább 30-45 ° -nak kell lennie, és a sebesség csökkentése legalább félig kell lennie.
A pályán és a gyakorlatban bekövetkező kombinált manővereket ritkán alkalmazzák a hajó kezelhetőségének romlása miatt, amikor a sebesség csökken.
Az MPPSS-72 szabály követelményeinek megfelelően ... amennyire csak lehetséges, hogy elkerülje:
- A bal oldali változtatások, ha egy másik hajó a keresztirányban van, és nem túlzott;
- az áthaladáson vagy a haladás mögött található hajó irányába változik ";
- Figyelembe kell venni a radar korlátozását is, mivel a bal oldali hajó visszhangja nem figyelhető meg a képernyőn.
A grafikus csík módszere
A grafikus tömítés pontosabb információkat ad a bíróságok helyzetéről, és M-78 manőverezhető tablettán (212. Ábra) történik.
Az eltérés feladata: 1) a kezdeti helyzet alkalmazása a tabletta és a relatív sebességvektorok sebességének háromszögei építése;
2) A veszélyes közelítés (ütközés) büntetőeljárásának becslései, amelyek visszhangjait az RLS képernyőn megfigyelik, a legrövidebb konvergencia / kr, metszéspont / "EP, a DPR legrövidebb konvergenciájának távolságának kiszámításával azonosítsa valódi és potenciális veszélyt;
3) a manőver választása és igazolása, a hajók elosztása, amellyel eloszlatni kell;
4) A kiválasztott manőver kiszámítása a kezdeti helyzet vektor háromszögeinek grafikai újjáépítésével;
5) A manőver kezdetének időpontjának kiszámítása (figyelembe véve a manőverezhető elemeket
A hajó), a preemptati idő (3 vagy 6 perc) van kiválasztva, az eltérés távolság, az eltérések időpontja és a kezdeti folyamatok közötti távolság a manőverezés során;
6) A relatív mozgalom (régi) várt vonalának (régi) várt vonalának alkalmazása (megfigyelhető hajó).
Tekintsük részletesen az eltérés problémájának megoldásának folyamata grafikus (radar) segítségével, amely mozgatható tabletta.
1. A számítások kényelme érdekében az időintervallum 3 vagy 6 percet vesz igénybe, t e. 1/20 vagy 1/10 óra.
2. Építsen a táblagépre a központi vektorból természetesen és a hajónk VL sebességét.
![]()
Ábra. 213. A diszkrét probléma megoldása grafikus fekvéssel
![]()
214. ábra A hajó potenciális veszélyének és helyének meghatározása, az eltérésekhez, amellyel manővert kell végeznie
3. A visszhangjelek RLS-képernyőjén megjelenő megjelenéssel meghatározzuk a kikapcsolódásukat és távolságukat, és alkalmazzuk a tablettát.
4. Az előző sorrendben egyenlő időközönként (3 vagy 6 perc) a következő pontokat alkalmazzuk, és a vegyületük után a relatív sebességvektorokat kapjuk.
5. Ezekkel a vektorokkal vektoros háromszögeket építünk, amelyeknél a tabletta középpontjából származó VC-t az L első pontra továbbítjuk, ha a VC vektor kezdetét összekapcsolja a második 2. ponttal, megkapjuk a sebességválasztást a megfigyelt hajó w
6. Az 1. és 2. pontos vonalat a tabletta központjára értékesítik, majd meg fogjuk kapni.
A helyzet értékelése a bíróságok ütközésének veszélyének meghatározása. Megtaláljuk a legrövidebb távolságot a DKP, a Tabletta közepétől a Tabletta központjától és a DNEP TARGET Pályájának kereszteződésének pontjáról, amelyhez egy vonalat végezzünk a tabletta közepétől, párhuzamosan a sebességvektorral párhuzamosan a "bírósági cél)
A hajók potenciális sebességének azonosítása kétféleképpen hajtható végre:
1) Elvesztjük a hajónk (VC) vagy a hajó-cél (V ") manőverét (V"), és meghatározzuk a LOD-ot és a lehetséges veszélyt a potenciális veszélyektől való áttéréssel. A pályánkat, a sebességünk sebességét vagy kombinált manőverét jobbra változtatja Ragasztja a "B" edény helyzetét. Ebben az esetben a "B" edényhez szükséges manőver szükséges (214. Ábra);
2) A visszhangjelek mozgásának jellemzői az RLS képernyő relatív mozgásában, amelyet részletesen szétszereltek a vizuális értékelési módszerrel.
A manőver típusának kiválasztásához és indokolásához minden lehetséges lehetőség elveszíti: változtassa meg a kurzust, a sebességet vagy másokat egyidejűleg, az összes olyan tényező, amely a korlátozott láthatóság, a búvártér navigációs jellemzői, az MPPSS-72 és a a hajójuk manőverezhető képességei és egy lehetséges manőverhajó cél. A hajónak törekednie kell a biztonságos eltérésre elfogadható lehetőséggel, hogy kiszámítsa a palettát és az uralkodót használó manővert. Minimálisra csökkenti a grafikus munkát egy vagy két hajón. Ábrán. 215 Számítsa ki a manővert a biztonságos eltéréshez a kurzus jobb oldalára történő megváltoztatásával. A preempted pontok helyzete nem befolyásolja a számítási módszert a kezdeti helyzet vektor háromszögeinek használatával. Mindig emlékezni kell arra, hogy a megelőző pont pillanata a manőver végének feltétele.
A hajó manőverének kezdetének pillanatát figyelembe veszik, figyelembe véve a hajó manőverező elemeit (tehetetlenség, fékezés, esztergálás stb.).
![]()
Ábra. 215 A manőver kiszámítása az eltérésekhez, hogy megváltoztassa a kurzust jobbra; A számítás a "B" edényrel történik
Az edény vektor háromszögében a "A" Vektor a sebességünk jobbra a kiszámított szöghez. Kapunk egy új vektort relatív sebesség VO és Csatlakoztassa a _2 pontot a forgatott VQ vektor végével. Ezzel párhuzamosan a relatív sebesség vektorai V "O a preemptati pontból az" A "-t végezzük. A preempív pontot ugyanabban az időintervallumban veszik figyelembe. Ezután meghatározhatja a TPICX edények eltérésének meghatározását és A D0TX hulladék távolsága a hajónk során (lásd a 215. ábrát).
A kiszámításhoz a relatív sebesség új vektorát használjuk W A hulladék távolságát a tablettán kell kiszámítani. Ehhez új kurzusunk sorában a tabletta központjától helyeztük el, elhalasztjuk azt a távolságot, amelyet a hajónk áthalad az eltérés során. Ezután a kapott ponttól kezdve, hogy merőleges legyen a kezdeti tanfolyam vonalára. A merőleges szegmenst a tabletta skálán a tanfolyam távolságától függ.
A manőverezés eredményét feltáró vezérli. Nem csak a hajót alkalmazzák a tabletta, amelyhez képest a manőver, hanem más hajók is, amelyek potenciális veszélyt jelentenek. A várt relatív mozgalom ezen vonalait a manőverezés után a fejlődő helyzet szabályozására irányítják annak érdekében, hogy időben felismerjék más hajók manőverét, valamint a számítások és grafikai épületek hibáinak esetét.
A fentiekből látjuk, hogy mindkét módszer összefügg, és kiegészíti egymást, biztosítva az egymással kapcsolatos problémák megoldását a bíróságok biztonságos megkülönböztetésének megoldására a korlátozott láthatóság feltételeiben.
Az RLS képernyő feletti hajókon egy tükör tabletta van telepítve. Ez egy segédeszköz, amely egy nemparax optikai rendszer. A tükör tabletta előnye, hogy lehetővé teszi egy grafikus tömítés elvégzését anélkül, hogy megszakítaná a megfigyeléseket az RLS képernyőn.
A képesítések rendszeres időközönként javítása, a tengeri flotta hajózója átirányítja a tanításokat, hogy megoldja a radar szimulátorokat.
A hajók (hajók) megegyezhető fellépéseinek lehetetlensége miatt a korlátozott láthatóság feltételeiben az IPTSU-ban az eltérések száma nem kategorikus formában, de ajánlások formájában adódik. A 19. cikknek megfelelően. A hajó, aki egy másik hajót talált egy radarral, először is meg kell határoznia, hogy fennáll-e az ütközés veszélye. "Ha kétségek merülnek fel az ütközés veszélyével kapcsolatban, feltételezni kell, hogy létezik" (7. szabály. "A").
A túlzott közeledés elkerülése érdekében a manőver kiválasztása a helyzet függvénye. A manőver egyidejűleg változhat a tanfolyamon, a sebességben, a másik pedig a másikban. A tanfolyam és a sebesség megváltoztatása jelentősnek kell lennie. Kicsi következetes változások a tanfolyamon és a sebességben nehézségekbe ütközik a radarinformációk értelmezésében egy versenyen. A sebességváltozás alatt meg kell érteni a gépek csökkentését vagy leállítását, mivel a korlátozott láthatóságú sebesség növekedése ellentétes a szabályokkal.
18.2. Táblázat. Taktikai és műszaki adatai valamilyen navigációs radarról

A manőver csak a tanfolyam változása hatékony, ha a tanfolyamváltozás előre történik, ha elegendő vízterület van, és ha ez a manőver nem okoz túlzott konvergenciát más hajókkal. A kurzus folyamatainak megválasztását a hajóparancsnoknak nyújtják, azonban a szabályok azt javasolják, hogy elkerüljék:
Balra változik, ha a másik hajó a hajtás előtt van, ha ez a hajó nem túlzott;
Változások a hajón vagy a kereszteződés mögött található edény irányában.
A helyzet elemzése és a cél elemeinek meghatározása (EDC)
A helyzet egy manőverezhető tabletta alkalmazásával történik (18.1 ábra):A hajó helyét a tabletta közepén tartják;
A csapágyakon és távolságokon, amelyet egy radar 1-2 perc elteltével mérnek, a táblagépre a cél legalább két helyére vonatkoznak;
Az M1, M2, M3 pontokon keresztül tartsa a LOP1 relatív mozgását;
A tabletta központjától a LOD1-hez, a COP1 merőleges leengedése, amelynek hossza a legrövidebb különbség a DKV-ben.
Ha a DKP több adag, akkor a túlzott (veszélyes) közeledés fenyegetése nem. További számítások és manőverek nem szükségesek, amíg a cél megváltoztatja a kurzust vagy a sebességet.
Ha a DKP kevesebb adag, akkor meghatározzák az EDC meghatározását:
A vektortól a járművétől a vk;

Ábra. 18.1. A helyzet elemzése, az EDC meghatározása és az eltérések manőverének kiszámítása a manőverezhető tabletta egyetlen céljával
- A VK vektor végétől egy vonalat hajtanak végre, párhuzamos LOD1 ezen a sorban, a VP relatív sebességének vektorát a képlet kiszámítja

- a lényeg csatlakoztatása a VR vektor végével, a VM sebességvektorát kapjuk;
Gyors idő a legrövidebb távolságra

A helyzet elemzéséhez és az EDC-t a "Palma" kártyával történő manőverezhető táblagépen, a következő lépéseket hajtjuk végre:
A manőverezhető tablettát az asztalra helyezzük, és koordinálják a rögzített tartományok (NKD) tartományainak skáláját tabletta körökkel;
A tabletta körében a távolságok írják be és kikapcsolják az NKD-t;
Töltsön el egy vonalat a hajón a tabletta (a hajó a központban), és egyesítse a kép jelölésével;
Rögzítse a tablettát, és alkalmazza a megfigyelt célok kezdeti helyeit;
1-2 perc elteltével az egyes célok legalább két-három helyére vonatkoznak a tablettára;
Az egyes célok relatív mozgásának vezetői.
A LOD elhelyezkedésével és a DKP méretével a túlzott konvergencia célja. Az EDC kiszámításának további feldolgozása a fentiek szerint történhet. Az EDC átvételének felgyorsítása érdekében a következő vételre kerül:
A nyomtatott célokkal rendelkező tabletta visszaállt a hajó megfigyelése során a hajó által átadott mennyiségben;
Alkalmazzon új célokat, a tablettát minden alkalommal, amikor a tabletta az utazott távolság sebessége visszaáll;
A megfelelő célok helyének összekapcsolásával az egyesek valódi sebességének vektorai az előző pontokról a következőkre irányulnak;
Az igazi sebességvektorok nagyságát a szokásos módon számolják ki, a megfigyelések távolsága és időpontja révén.
A megadott módszer kevésbé pontos, mint az előző, de lehetővé teszi, hogy gyorsan értékeljük a helyzetet, amikor több hajóval találkozik.
Ha valódi mozgást mutat a radar módban, lehetséges, hogy az EDC közvetlenül megkapja a mutatót, és gyorsan észleli a változást. A valódi mozgásmódban futó indikátoron azonban a DKP és a TKR meghatározása nehéz, ezért pontosan meghatározhatja ezeket az értékeket, szükség van a relatív mozgási módra.
Az EDC meghatározása (1: 50 000, 1: 25 000) nagytéri térképen a navigációs kapcsolatokban készült, ahol az eltérés manőverének kiszámítása csak veszélyes pályához vezethet. Ebben az esetben a navigátornak lehetősége nyílik arra, hogy a tömítést önmagára és a célra abszolút mozgásra helyezze anélkül, hogy elválasztaná a navigációs helyzetet. Az auto-támogató használata esetén lehetőség van arra, hogy a hajó jelenlegi koordinátái több célból tartsák a tömítést, és egyértelműen megfigyeljék a helyzetet.
A módszer fő hátrányai: az ütközés kockázatának gyors meghatározása; A legrövidebb távolság a DKP célt közvetlenül a tömítésből nem lehet beszerezni; A térképen csak az igazi kurzusok metszéspontját alkalmazhatja. Ezért a tömítéssel az abszolút mozgásban egyidejűleg a helyzet analízise és számításai az eltéréshez ajánlottak a "Palma" előtaggal rendelkező manőverezhető tabletta előállítására a térképen lévő eltéréssel.
Az eltérés manőverének kiszámítása és ellenőrzése egyetlen céllal egy manőverezhető tabletta
Ha a túlzott közelgő fenyegetést fenyegeti, azaz ha a DKP kisebb, mint a DOS, akkor meg kell változtatnia a hajó tanfolyamát vagy sebességét, hogy a cél a tabletta középpontjából (K pontok) több mint D03. A tabletta manőverének kiszámításához a következő műveletek (18.1 ábra):Kiszámítja és alkalmazza a LOD1-re a VC céljának preemptatív helyzetét; Az M3MC \u003d VRTC nagysága, ahol TZ \u003d 2-4 perc, az üzemeltető képzésétől függően;
Az MC pontjától, a tabletta kerületének érintője, amely megfelel a D03 előre meghatározott távolságnak és az eltérésnek az eltérésnek; a LOD2 céljának új relatív mozgása;
Két új nagysebességű háromszög épül, amelyhez a VM vektor végétől a vonalat az ellenkező irányba hajtják végre, a párhuzamos LOD2 (a 18.1 ábrán a pontozott vonal), a a VK-nek megfelelő tabletta köre;
A QC "és KK" két vektorából válassza ki azt, amelyben a relatív sebesség VP vektora nagyobb lesz az abszolút értékben, és a CC-sebesség "gyorsan vezet a célhoz való eltéréshez.
Hasonlóképpen, a manővert a kurzus sebességének megváltoztatásával számítják ki. A megfigyelések számított kurzusának (változó sebességének) bekapcsolása után a cél folytatódik, és a manőver vezérlést a táblagépen lévő célhelyek alkalmazásával szabályozzák. Ha a célpont a LOD2 vonalon esik, a manővert helyesen hajtják végre. Ha a hely a cél M5, M6, M7 feküdt a vonalon Lod3 párhuzamosan LOD2, ez azt jelenti, hogy a fordulat már korábban megkezdődött, mint a számított idő és, hogy az eltérés bekövetkezik a parttól nagyobb D03. Változtassa meg a LOD irányát, azaz az egyik irányba történő elmozdulását egy irányba, jelzi az EDC változását, amely új számításokat igényel.
Az Hollc "Ocean" használatának jellemzői
Tartalmazza az "óceán" radarot, van egy számítástechnikai eszköz, amely lehetővé teszi (a cél visszhangoló kézi rögzítését követően) a DKP, a TKR és az EDC meghatározásához. A számológép pontosságát a következő értékek jellemzik:A DKP-t 2-3 fülke pontosságával határozzák meg;
A TCR-t körülbelül 2 perc pontossággal határozzák meg;
A közeledő hajó menetét 5-10 °, stroke - 0,5 és 1 tonna pontossággal határozzák meg.
Számítás, eltérő manővert készítenek egy manőverezhető tabletta, amint azt fent jeleztük. A számítástechnikai eszköz lehetővé teszi, hogy utánozza a kiválasztott manővert ("elveszítse" előre), és becsülje meg a lehetséges eredményeket, míg a LOD kiemelve van a mutató képernyőn.
Az egyetlen céllal rendelkező eltérések főbb lehetőségeit a 23.11.
Kiszámítása az eltérés nélküli manőver mozgatható tabletta több gólt egyszerre
A legnehezebb, de a szükséges szükségesség egyre nehezebb, de a szükségesség egyre inkább, különösen az élénk szállítás területén. Eddig a manőver kiszámításának módszerei a speciális palackok használatán alapulnak, az üzemeltetőből elrejtve a manőver fizikai jelentését, ezért nem szabad vakcinázni a flotta.A legreatívabb a számítás az O. G. Morava által javasolt veszélyes relatív tanfolyamok (szakács) szektorainak kialakításával. A javasolt módszerben szereplő manőver kiszámítása a következőképpen történik (18.2. Ábra):
Az ellenfelek képernyőjén (1., 2., 3. objektumok) észlelésével mindegyikük egy relatív tömítést vezetnek egy manőverezhető tablettán;
Miután elvégezte a LOD2 és a LOD3, hogy feltárja a túlzott közeledés kockázatát egy vagy több gólt, határozza meg EDC (VM1, VM2_ és VM3);
A cél elérése érdekében a maximális relatív sebességgel (amely a DCR korábban előfordul, hogy a DCR-nek korábban bekövetkezik) az érkezés pillanatát adja meg a preemptatív helyzetbe, és ebben az időben alkalmazzák az egyes 1MC, 2 MC, HP;
Az egyes célok elpusztult helyzetétől a tangenseket a DOS kerülete, az egyes célok veszélyes ágazatának (OS) meghatározása;
A TARGET VM1, VM2, VM3 igazi sebességének végén a VM1, VM2, veszélyes relatív tanfolyamok szektor;
Az összes célkitűzéssel ellátott biztonságos eltéréshez, egyidejűleg megváltoztatja a tanfolyamukat, vagy a sebességet, hogy a VK sebességének vége a szakácsból van-e.

Ábra. 18.2. Egy eltérés manőver kiszámítása több gólt egyidejűleg egy manőverezhető tabletta
Ábrán. 18.2 Látható, hogy a V "K értékének sebességének csökkenése lehetővé teszi, hogy szétszórja a DKP több gólt. Ha a VV VV-ek vége a COP-1 határon fekszik, akkor a Az 1. számú célkitűzés a Dow távolságától és másokkal való távolságban fordul elő, nagyobb távolságra. Ha a V "V" V "V" "vége a SOK oldalának metszéspontjában lesz -2 és COP-3, akkor a Dow-on lévő eltérés a két gólnal történik, és az 1-es célszámmal - nagyobb távolságra kerül sor. A hajóparancsnok által jelentett eltérések számított lehetőségei, amelyeket a hajóparancsnok jelent meg, hogy kiválasztja és jóváhagyja az egyiket . Az eltérések manőverének vége az összes célhoz tekinthető az utolsó számuknak a relatív áthaladásának pillanatának.
* Az automatikus működés módjában a csapágy meghatározásának pontossága és az RLS "óceán" távolságának mérete 16 mérföld távolságban 0,5-0,7 ° és 30-40 m.
Előre
Tartalomjegyzék
Vissza
Tömítés egy manőverezhető tabletta.
1. Igaz tömítés.
Az ilyen tömítés közvetlenül egy nagyméretű utazási navigációs térképen vagy papírlapon végezhető el. A módszer lényege a következő. Miután megtalálta a jelzőfényű egy másik edény visszhangjelét, azt a P1 csapágya és a D1 távolság határozza meg, lehetővé téve a stopperóra, észreveheti a hajó T1-et, a CN-je keresztmetszetét és a Laga OL1 visszaszámlálását. Az ECHO A1 helyét a csapágy és a távolság mentén helyezzük el, miután kiválasztotta a kívánt skálát (1. ábra). Egy bizonyos idő elteltével (számítások esetén a 3 vagy 6 perces intervallumot) megismételjük (P2, D2, T2, OL2) és a 02 tartályuk helyszínei és az A2 megfigyelt edényt okozzák. Az A2-es pontok és az A2 pontok átadása után egyenes vonalat kapunk a CC céljának valódi mozgása.
Az A 1 és A2 pont és a T1 és T2 időtartama közötti távolság meghatározhatja a cél VC sebességét, és kiszámíthatja, hogy mikor és milyen távolságon áthalad a hajó terén és a DBER-ben.
A DKR és az idő legrövidebb konvergenciájának távolságának meghatározásához az A2 pontból származó TCR-t az első és a második megfigyelések során az A2F \u003d O1O2 megfigyelések során elhalasztja. Az O1C szegmens az A1 pontokon áthaladó vonalon merőleges, és az F pontok a legrövidebb konvergencia távolsága lesz. A bírók helyét a legrövidebb konvergencia idején (O1 és A4 pont) az O1C szegmensének párhuzamos mozgásában találja meg az O4A4. Gyors idő a legrövidebb távolságra

Az ülés körülményeinek és egy másik hajó mozgásának elemeinek meghatározása érdekében két megfigyelés elegendő. Azonban annak érdekében, hogy kizárják a hiányosságokat a megfigyelésekben, és győződjön meg róla, hogy a megfigyelési időszakban a másik hajómozgás elemei érvénytelenek, ajánlott növelni a megfigyelések számát. Az A1A2 \u003d A2A3 távolságok egyidejűleg (A1, A2, A3) időtartama (A1, A2, A3) időintervallum (A1, A2, A3) időtartama (A1, A2, A3) az A1A2 \u003d A2a3 távolságok egy közvetlen és egyenlőségét mutatja, mind a megfigyelések hiánya, mind a a célmozgás elemei a T1-t t3-ra.
Az igazi tömítés módszerének előnyeit a láthatóságának tulajdonítják. A hátrány az ülés fő körülményeinek meghatározásához szükséges grafikai konstrukciók relatív összetettsége: a legrövidebb közeledés és az idő.
2. Relatív tömítés.
Ez a tömítés széles körben elterjedt, mivel a fő kérdések gyorsan és egyszerűen és könnyen megoldhatók: a legrövidebb távolság a tárgyalás és milyen idő után. A relatív fektetéssel, az ülés körülményei és a célmozgás elemei a mozgatható koordináta rendszerben, amelynek kezdete a megfigyelő hajó helyén kerül. Ez megfelel a tényleges képnek, hogy a tartály megfigyelhető a relatív mozgásjelző képernyőjén.
A hajó helyének helyétől a tartály helyének helyétől helyezzük el a megfigyelt P1 és P2 és P2-et, és a D1 és D2 távolságot (2. Ábra) a kapott A1 és A2-en keresztül a LOD-t végezzük. Az operációs rendszer merőleges hossza, a relatív mozgás pontjától csökkentve a DKR legrövidebb konvergenciájának kiválasztott távolságát jelenti. Gyors idő a legrövidebb távolságra


A relatív fekvéssel szintén meghatározzák a tartályunkat, amelyben a cél a hajónk áthaladása lesz. Ehhez elegendő az OP távolságának mérése. (Ha a LOD áthalad az orrán, határozza meg a kurzusunk céljának metszéspontját, és ha a LOD áthalad a takarmányunkban - a hajóink kereszteződésének pontjáról, amelyre a tabletta középpontját végzik egy vonal, amely párhuzamos a LOD metszéspontjával). A TPER metszéspontját a hajóórák bizonyságának hozzáadásával határozzák meg, amikor megtalálják a visszhangjelek helyét az időintervallum A2 pontján:

Emlékeztetni kell arra, hogy először a vesfodentnek meg kell határoznia az ülés fő körülményeit, azaz DKR és TKR, majd meghatározza a célmozgás elemeit.
A cél valódi mozgása a két mozgás összege - relatív
És megfigyelő hajó vagy
Tekintettel a vektorok összegének kommutativitására ![]() található
található
Két út.
Vektoros háromszög kiépítése (lásd a 2. ábrát), amelyet szilárd vonalak jeleznek, egyenesen hívják. Az alatta lévő sebességvektorok (utak vonalak) kezdete a hajók mozgásának irányába helyezve egy ponton.
Az inverz konstrukciót is használják, amelyben a bíróságok mozgása felé haladó vektorok a közös pont (a pontozott vonal által mutatott) végeivel konvergálnak.
A jövőben elsősorban közvetlen konstrukciót használunk, mivel kényelmesebb az eltéréssel kapcsolatos feladatok megoldása során.
A hossza a hajó mozgás vektor egyenlőnek kell lennie a kiválasztott skálán úszás hajójának a megfigyelés során tett, hogy építsenek egy vektor háromszög. A kapott célvektor hossza megfelel a célnak a megfigyelések során történő úszásnak.
3. Vezethető tabletta.
A manőverezhető tabletta a poláris koordináták rácsja. Az úszáshoz kapcsolódó települések felgyorsítása A megfigyelések során egy logaritmikus skálát helyeznek egy manőverezhető tablettára. A következőképpen épül fel: Egyenes kezdetén a kiindulási ponttól néhány skálán a szegmenseket a 0,1-60-as számok tizedes logaritmusaikal kell elhalasztani, és ezeknek a számoknak az értékeiben digitalizálják. Mivel a percen belüli 60 egységnyi cselekvési egységnél hasonló a decimális rendszer számával rendelkező cselekvésekhez hasonlóan, a skála bármely minta hozzárendelhető az "idő", a "távoli" vagy a "sebesség" néven és a jól ismert értékekben kettő, hogy megtalálják a harmadikat, megoldja az arányt
https://pandia.ru/text/80/090/images/image012_74.gif "width \u003d" 331 "Magasság \u003d" 26 "\u003e
Ha logaritmikus skálát használ, akkor emlékezni kell arra, hogy a keringés "felső" lábai (a nagy számokra telepítve) mindig megmutatják az időt, és az "alacsonyabb" (kisebb számokra telepítve) - sebesség és távolság.
A megfigyelésekből a jel relatív mozgása - 8,2 mérföld 8 perc alatt. Keressen egy relatív sebességet.
A 2.2-es körzet alsó lábát, a felső - a "8" méretarány felosztását helyeztük el;
a keringési megoldás megváltoztatása nélkül mozgatjuk a forgalom felső lábát, hogy megoszthassuk a "60" méretet. A keringés alsó lábát a relatív sebesség VO \u003d 16,5 UZ.
t \u003d 17 perc, v \u003d 15 UZ. Keresse meg az S. távolságot.
A kerület felső lábát a "60" osztályra, az alsó - 15 "-re helyeztük;
a körkörös megoldás megváltoztatása nélkül mozgatjuk a keringés felső lábát, hogy megosztjuk a "17" méretet. A keringés alsó lábának megmutatja a távolságot S \u003d 4,3 mérföld.
V \u003d 17, az edény átment S \u003d 8,7 mérföld. Határozza meg azt az időt, amelyre a hajó átadja ezt a távolságot.
A kerület felső lábát a "60" divízióra és az alsó részre helyeztük, a "17" skála megosztására;
a circule megoldás megváltoztatása nélkül a keringés alsó lábát a "8.7" méretre osztjuk. A keringés felső lábai t \u003d 31 percet mutatnak.
4. Az eltérések kezelése és igazolása egy adott távolságban.
Ha DKR< Dзадто необходимо предпринять маневр для расхождения с судном-целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию и выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя tкр, VO и Dзад, выбирает время начала маневра. Последующая графическая прокладка служит для проверки безопасности выбранного маневра и уточнения его величины.
A grafikus tömítés az eltérés nélküli manőver indokolásához egy adott távolságban az 1. ábrán látható. 3. A következő sorrendben történik:
a manőver becsült időpontjára vagy a manőver tervezett távolságára, a célhely pontjáról a megkülönböztetési manőver kezdete idején;
a vektor mentális csavarja, vagy hossza változása a manőver kiválasztott nézetével összhangban határozza meg a manőver életének megfordításának oldalát;
az Olod Dzad dzadának érintőjére költözött, míg a DVAD két lehetséges érintőjéből az egyik elvégzendő, amely megfelel a LOD visszafordításának oldalának, a manőver kiválasztott formájával;
a vektor vége, párhuzamosan a régebbi irányban, az idősebb irányával ellentétes irányban, az új relatív sebesség vektorát elvégzik;
ha a manővert a tanfolyam megváltoztatásával választják ki, akkor a megfigyelő sebességi sebességvektorának új iránya az O1 pont körül fordul elő, mielőtt az új relatív sebességvektor vektorának metszéspontja van; a vektorok közötti szög, és meghatározza a hullámhossz kívánt szögét;
ha a manőver kiválasztása sebesség, akkor a megfigyelő új sebességvektorja megegyezik a vektor vektorával az O1 ponttól az új relatív sebesség vonalig;
ha egy polgári és sebességgel kombinált manővert választanak ki, akkor az O1 pont körüli megfigyelő edény új kurzusa megtalálása, a megfigyelő edény vektorának vektorja a becsült löketnek megfelelően csökken.

5. Számvitel a hajó tehetetlenségéről.
A korábbi fejezetek problémáinak megoldása során feltételezték, hogy a hajó azonnal megváltoztatja a mozgás és a LOD elemeit a manőver során, élesen megváltoztatja irányát a mag felé. Valójában természetesen nem így van, és a hajó tehetetlenségét figyelembe kell venni.
Cirkulációs számvitel.
Az NSHP-82 szerint a forgatási elemek a manőverezhető elemek táblázatában mutatkoznak be grafikon és asztal formájában, amikor egy teljes elülső részből keringnek az áruk jobb oldali és bal oldalán és a ballasztban A kormánykerék "" a fedélzeten "" (\u003d 35 °) és "a diplomáson" (\u003d 15 ÷ 20 °). A fejezet feladatainak megoldásakor feltételezzük, hogy az ábrán látható keringési diagramokat használják. 4 A kormánykerék kezeléséhez \u003d 20 °. Emlékeztetni kell arra, hogy a hajó tényleges keringésének paraméterei jelentősen eltérhetnek a táblázatból a sebesség sebességétől függően, a leszállás (tekercs és differenciálmű), a csapadék és a mélység aránya, a szél és a szél és az izgalom erőssége.

Ha a kurzust a hajó megfigyelője változtatja meg (5. ábra), a célhelyzet helyéhez viszonyítva a Curvilinear pálya mentén kerül az M1 pontra a LOD-ből (a varázsló hajó manőverének kezdete idején) az F pont a régi (a manőver végén). A jövőben a célt egy kihasználta egy kihasznált, hogy a cél a cél a cél lesz nehezebb lesz. A hajó-megfigyelő sebességének csökkenése miatt az ügynök forgalomba hozatala nem lesz párhuzamos a V01 vektorral, amíg a hajóink tárcsázzák a stroke kezdeti sebességét. Ebben az esetben a keringés sebességének csökkenése részben kompenzálja. Sok esetben (például, ha az ellentételezéssel rendelkező eltérések), a hajó-megfigyelés sebességének csökkenése miatt a https://pandia.ru/text/80/090/images/image016_68.gif "Szélesség \u003d" 600 "magasság \u003d" 369 "\u003e
1. A relatív köztes tanfolyam módszere.
A grafikus lefekvésből a kurzus szükséges sarkát találják; A szálas sarkában lévő manőverező elemek táblázatából, a hajó által a fordulóban töltött idő, TMAN; a köztes tanfolyam és a köztes SPR úszás szöge; A célpont M1 pozíciójától a forgás kezdete idején a fordulat során elhalasztják; A vektor végétől az oldalra, az inverz közbenső kurzus, az SPR intermedier vitorlázását elhalasztják; A SPR vektor elején egy feltáró párhuzamosan történik.
A módszer pontos, de időigényes. A hajó hídján lévő eltérések megoldásakor nem vonatkozik. A balesetek paramétálása és referenciaként szolgál, amikor értékeli a közelítő módszerek pontosságát.
2. A feltételes pre-pont pont.
Az OLODA-t nem a célpont M1 pontjából végzik el a manőver kezdete idején, és az M kondicionált megelőző ponttól a TPER eszközének időpontjára utal. Az első közelítésben a forgás ideje fele az időtartama. Így a keringés figyelembe vételének módszerével a megfigyelő hajójának forgása a TPER ~ 0,5 TMAN-ra kezdődik, mint az edény célpontja, amelyből az idősebbet végezték.
A módszert leggyakrabban a gyakorlatban alkalmazzák. Pontosabb az ellenállóképek és kevésbé pontos a konvergáló tanfolyamokon. Nem alkalmazható, ha a műholdas edényt táplálja, mivel ebben az esetben a v0 \u003d 0 és az M és M1 TPR ponttal egybeesik.
3. A DZAD módosítások bevezetésének módja.
Mivel a számítások azt mutatják, amikor a megfigyelő hajó folyamata megváltozik, a forgás tehetetlensége miatt legfeljebb 90 ° -os hibák szöge nem haladja meg a taktikai keringési sugarat. Nagy szögben a fordulás eléri a keringési átmérőt. Ebben a módszerben a Dzadnakovates egy margót a lehető legnagyobb hibára az elfogadhatatlan keringés miatt. Ez a módszer a fő, ha a potenciálisan veszélyes edény szigorúan fordul elő, ami párhuzamos vagy szinte párhuzamos tanfolyam.
Számviteli tehetetlenség, amikor manőverezési sebesség.
Az NSHS-82 szerinti inerciális jellemzők és edények egy állandó távolságra épülő ütemterv formájában kerülnek benyújtásra, és az idő- és sebességértékek skálájára vonatkoznak. E fejezet feladatainak megoldása során feltételezzük, hogy a hajó tehetetlenségi fékjellemzőire vonatkozó információk körülbelül 10 000 tonna (I. hajó) és a hajó elmozdulásával rendelkező edényt (II. Határ), az I. függelékben .
Ha a sebességet az edény megváltoztatja, a cél relatív elhelyezkedése egy görbületi pályán mozog, amelynek görbülete fokozatosan csökken, mivel a hajója új állandó sebességgel jár. Hibák az elfogadhatatlan tehetetlenségtől, amikor a manőver sebessége több mérföldre érheti el a tehetetlenségi számvitel fontosságát. Ha manővert, a nagy tonnáns edény sebességét, a megfigyelő hajó új sebességét több tucat percen keresztül telepítik, és ezúttal a célpont a görbe mentén mozog - innen a tehetetlenségi számvitel komplexitásától.
A tehetetlenségi számvitel a következő módon lehetséges.
1. A feltáró görbe megépítésére szolgáló eljárás.
Az edény mozgása relatív pályája az utazási háromszögek építésével megtalálható a T1, T2, ..., TN szekvenciális időintervallumokhoz, a manőver után, így (TI) \u003d SZ (TI) - SN (TI)
Almoor görbe kialakítása (6. ábra):
delhi helyének pontjától a hajó manőverének kezdete idején, hogy a kurzus menetének célját töltsék, és vegye figyelembe a szegmenseket bizonyos időintervallumokon keresztül, például három percenként ( B1, B2, ..., BN pontok); A BI pontjaitól a vonalak oldalára, a megfigyelő hajó fordított menetéig tartására, valamint a hajó megfigyelő által lefedett szegmensek elhalasztása a manőver után (C1, C2, ..., CN) ); Keresztül a Ci pontok elvégzésére a görbe Lod és meghatározza DKR legrövidebb távolság a központtól, a tablettát a görbe.

Az ok pontos és vizuális, de munkaerő-intenzív. Ez a módszer csak a DKR NO a kiválasztott manőverre való előrejelzésének feladata, de a probléma nem oldódik meg, hogy megtalálja a szükséges sebességváltozást az adott távolságban. A híd körülményei szerinti problémák megoldása nem vonatkozik. A balesetek parátájában, valamint a hozzávetőleges tehetetlenségi pontosságának becslésére hivatkozva.
2. A DZAD módosítások bevezetésének módja.
Ha a hajó tehetetlenségi intézkedéseként fogadja el a televíziós jellemzőt (az inerciális jellegzetes TV numerikusan megegyezik a Menevra STOP..GIF "WIDTH \u003d" 106 "Height \u003d" 24 src \u003d "\u003e . GIF "szélesség \u003d" 67 "magasság \u003d" 22 "\u003e. GIF" szélesség \u003d "34" magasság \u003d "22 src \u003d"\u003e Nem haladja meg a 3 Kb-ot. Ebben az esetben a DVAD egy tartalékhoz rendelhető a maximális hiba. Ez a módszer lehet a fő a hajók az elmozdulás 1000 tonna.
3. A feltételes előfeltételi pont módja (7. ábra)
Ugyanakkor egy új bevált sebességsebességet a sebesség háromszögében halasztanak el a sebességi háromszögben, de az OLODA a célpont M1 helyétől a manőver kezdete idején és a kondicionált pre -MP pont m, hivatkozott a naplóra a vöder korai idejére. Az első közelítésben a hajó új sebességének felét állapítja meg. Így a tehetetlenség figyelembe vételének módjával a TUPR ~ 0,5 TMAN-nál történik, mint a hajó, a cél a cél elérése, ahonnan az idősebbek elvégezték. A megfelelő előrelépés helyes választásával az előrehaladást a tényleges visszhangjelzési pályán tartják.

Ebben az esetben a tehetetlenségi módszert feltételesen úgy vélik, hogy a TPER alatt az előző hajó edényét fenntartják (míg az utazott út túlértékelt), és az új sebességű VN1 sebességet azonnal telepítve (egyidejűleg) az út elhaladt). Amint az az 1. ábrán látható. 8, az optimális az optimális, hogy hatással van, amelyben az utazott út túlbecslése a TEPR-ben a későbbi alulértékelés ellensúlyozza. Ez megfelel az ábrán látható árnyékolt területek egyenlőségének. nyolc.

Ábrán. A 9. A kiválasztott manővertől függően az optimális végrehajtási idő (VN1 / Vn \u003d 0 - Stop, VN1 / VN \u003d 0,5 - MPH stb.) És a tehetetlenségi tv jellemzői. E tájékoztatás alapján a repülés elején a korai idő munkálkodási táblázata összeállítható.

Az edénynek van egy inerciális jellegzetes tv \u003d 4, és a következő fokozat a PPH 14 UZ, SPK 10 UZ, MPH 8 UZ, SMPH 5 UZ aránya. Tegyen munkát a végrehajtási időről.
PPH - SPX. VN1 / VN \u003d 10: 14 \u003d 0,71. A TUPR / TV \u003d 0,8 ábrán látható grafikonból; TPR \u003d 0,8 * 4 \u003d 3,2 ~ 3 perc. Hasonlóan a VN1 / Vn \u003d 0,57 esetében; 0,3; 0, megkapjuk a sebesség sebességét a teljes löketből.
SMPH, STOP. |
|||
4. Módszer üzemmód.
Ebben az esetben a tehetetlenség beépítésének módját a sebességi háromszögbe való beépítésének módja nem egy új hajó sebességét, és valamilyen átlagos (ekvivalens) sebességet a manőver kezdete során a legrövidebb konvergenciaig  A VCP és a VC vektorok végein keresztül a középső relatív sebesség vektorát elvégezzük, és az OLOodSR az M pontból (10. ábra) történik. Tény, hogy a visszhangjel a LOD és az OLODSR konvex közötti vonal görbe mentén mozog a LOD irányába, és az Olodsr kereszteződéseinek legrövidebb konvergenciáján.
A VCP és a VC vektorok végein keresztül a középső relatív sebesség vektorát elvégezzük, és az OLOodSR az M pontból (10. ábra) történik. Tény, hogy a visszhangjel a LOD és az OLODSR konvex közötti vonal görbe mentén mozog a LOD irányába, és az Olodsr kereszteződéseinek legrövidebb konvergenciáján.

Az első közelítésnél a régi és az új átlagos aritmetikai átlag közepes sebességként fogadható el.
![]()
Kis idővel a legrövidebb közeledéshez (), a hiba nem haladja meg a hajó kiadásának 10% -át, ha szabad fékezés esetén.
Pontosabban, az átlagos sebesség megtalálható a 2. függelékben megadott univerzális tehetetlenségi számviteli táblázatból. Egy univerzális tehetetlenségi számviteli táblázat használata a példákon.
Keresse meg a hajó átlagos sebességét a PPC-MPH manőverének kezdetétől a legrövidebb közeledésig, ha TKR \u003d 20 perc.
Az I. hajó fékhatásaiból (1. függelék) a 16 sebességgel, a TV \u003d 4 perc. A univerzális táblázatban tehetetlenségi számviteli a TV \u003d 4 oszlop, azt találjuk, a legközelebbi TKR \u003d 22 perc, és a megfelelő sor a fordított 0,5 Vn megkapjuk a VSR / VN \u003d 0,6. Az átlagos sebességet a sebesség háromszögében lehet elhalasztani a 0,6 szegmens VN szemével, vagy ha szükséges, fordítson a csomópontok VC \u003d 0,6 * 16 \u003d 9,6 UZ.
A radar tömítés eredményei szerint azt kaptuk, hogy a DVAD céljával eltérő eltérések esetén VSR ~ 0,5Vn. Az OLOATSR és a VO WED meghatározta az időt a manőver kezdetétől a TKR ~ 20 perc legrövidebb konvergenciájáig. A hajó tv-jének inerciális jellemzői \u003d 8 perc. Milyen manőversebességet kell fordítani a Dzadra való eltérésre?
A tv-ben lévő inertia-számvitelben a TV \u003d 8 perc oszlopban TKR \u003d 19 perc, és a megfelelő sorban keresik a legközelebbi alacsonyabb VCR értéket. Ebben az esetben a VCR \u003d 0,5vn a STOP oszlopban található. A DZAD céljaival kapcsolatos eltérésekre szükség van "stop" -ra. A szomszédos oszlopban látjuk, hogy a vt / vn \u003d 0,25, azaz ténylegesen a sebesség 0,25 VN lesz.
1. függelék.
A hajó mintegy 10 000 tonna elmozdul.
https://pandia.ru/text/80/090/images/image033_47.gif "width \u003d" 423 "magasság \u003d" 442 src \u003d "\u003e
2. függelék.
Manőverezhető tabletta
az egyenes vonalú manőverezési problémák grafikai oldatának kis mechanizálására szolgáló eszközök. Mind a harci manőverezésben használják (a fegyverek használatának elfoglaltsága, a közelítés egy adott távolsággal, az ülésen és egy másik feladatnak való kijátszása miatt), és ha eltér a tengerparti bíróságokkal.
- - 1) Menzula tábla, amely táblázatként szolgál a felvételkészítés során; 2) A menzulura ragasztott papírlap, a cserélhető terület terve a TO-RY-re vonatkozik; 3) külön lapos lapos kártya ...
Műszaki Ragaszány szótár
- - egy speciális sík felületű eszköz és egy eszköz, amely jelzi a kép koordinátáit a bemeneti ...
Rövid magyarázó szótár a nyomtatáshoz
- - Angol: Manualis rezsim A beállított időintervallum alatt változó teljesítményű erőmű működési módja: Feltételek és fogalommeghatározások a villamosenergia-iparágban ...
Építési szótár
- - manőverezhető, ó. Manőver f. 1. rel. manőverezni; szánták őket. Manőverezhető gőzmozdony. BAS-1. 2. Vezető hosszú távú erődítmények nélkül. Katonai műveletekről. Mobilháború. Manőverezhető védelem. Bass-1 ...
A gallicalizmus történelmi szótár orosz nyelv
- - Maswarm és ...
- - és ...
Az orosz nyelv orpográfiai szótárja
- - -d. 1. Készült a manőverek használatával, hosszú távú erődítmények nélkül. Mobilháború. 2. okozható, hogy gyorsan megváltoztassa a mozgás irányát. M. Cruiser. Maswarked taktika. | Sud Meniavrosis, -i, feleségek. ...
Ozhegov magyarázó szótár
-
Magyarázó szótár ushakov
- - manőverezhető, manőverezhető, manőverezhető. Hosszú távú erődítmények nélkül vezetnek; hangya. helyzeti. Mobilháború ...
Magyarázó szótár ushakov
- - manőverezhető manőverezhető, kézi adj. 1. Készült a manőverek használatával, hosszú távú erődítmények nélkül. 2. A manőverezés képessége 1 ....
Magyarázó szótár Efremova
- - Arr. 1. Készült a manőverek használatával, hosszú távú erődítmények nélkül. 2. A manőverezés képessége. // hozzájárul a mozgás irányának gyors változásához. 3. Alkalmazza. Ajánlott: manőverekhez ...
Magyarázó szótár Efremova
- - Aya, egy. 1. katonai. A hosszú távú erődítmények nélkül, hosszú távú erődítmények nélkül végzik; Antip. helyzeti. Mobilháború ...
Kis akadémiai szótár
- -; rövid Forma -en, -nna és mans "Eurahored, rövid ...
Orosz helyesírási szótár
- -; Mobilháború ...
Orosz verbális hangsúly
- - ...
Alak alakú szavak
- - mobil, mobil; Forgatás, magas, frissítő ...
Szinonim szótár
"Manőverezhető tabletta" könyvekben
Manőverezhető "filin"
A "Fokke-Wulf" zseni könyvből. Nagy kurt tartály Szerző Azheliovich Leonid LipmanovichA "Filin" Kurt Tank meggyőződött, hogy az intelligenciájának új nevét adja meg: "filin". A filin a természetben nagyobb, mint a baglyok és sokkal szörnyűbb zsákmány. A szárnyainak hintája meghaladja az egyik és fél métert. A filinok teljesen csendben repülnek, és ami a legfontosabb, egyedülálló
Tabletta sárga bőr
A könyvből "Ne sírjon rólunk ..." Szerző Kachaev Yuri GrigorievichSárga bőr tabletta visszatért haza, Nina Elistratov kiderült, hogy Yuri, Murat és Leva Akimov, elment a városba. A Fiú elhagyta a jegyzetet az asztalon, a szavakban elfogyott: "A vadászat késik. Ne aggódj. Mint mondj, ne aggódj, ha nyolc hamarosan, és
Fürdőszoba Tanszék: Tablet a felhőkben
A számítógép könyvétől PDA N138 (01.10.2011-07.10.10.2011) Szerző "Computerra" kompozícióFürdőkád: Tábla a felhőkben Szerző: fürdő Mikhailopublished október 05. 2011. 2011. szeptember végéig, Amazon bemutatta a tabletták minden gyártója egy jó tablettát, vagy pontosabban egy tablettát. (Hogyan kell másnak lefordítani az Aglitskoe Word tablettát?) A szerepben
Számítógép és tabletta
A hetvenes szülők hét készségeitől: a családi időgazdálkodás, vagy hogyan kell mindent kezelni. Képzési könyv Heinz Maria általÚgy gondolja, hogy a számítógép és a tabletta megérti, hogy a számítógépek és a tabletták komolyan és hosszú ideig léptek be az életünkben. Nem kell egy promeratornak, hogy észrevegye a régi papír technológiák cseréjének trendjeit interaktív. Ellenezzük ezt a tendenciát - nem érdekel, mit kell ellenállni
Nagysebességű manőverezhető Biplane - repülőgép csatatér
A Vörös Hadsereg Storm repülőgépének könyvétől. 1. kötet 1. A megjelenés kialakítása Szerző Perov Vladimir IlyichNagysebességű manőverezhető Biplane - A csatatéren repülőgép párhuzamosan dolgozik a soros hírszerző repülőgépek fényt támadó repülőgépek módosításával és egy "katonai repülőgépek" létrehozása a Vörös Hadsereg légierő szakemberei között a támadási elmélet mértékét megkapta
Az ezredes tabletta
A szerző könyvétőlAz ezredes tabletta előttünk nyilvános és költői kinyilatkoztatások - operatív analitika és vázlatok "természet" ... Szükségünk van rájuk, hogy megértsük múltunkat a mai tapasztalataival. Hogy ne feledje magát a fiatalokkal. És tovább. Érdekelnek a szerző sorsa - katonai
A tabletta
A BIG SOVIET Encyclopedia könyvből (pl) szerző BSE.IFA 2010: egyszer tabletta, két Andrey tabletta írt
A "CULDERR" SZÁMÁRA 33 Szerző "Computerra" kompozícióIFA 2010: egyszer tabletta, két tabletta Andrei írásbeli poszteri író tabletta számítógépek mutattak sokkal az Apple iPad előtt, de megjelenése a világukban Minden megváltozott jelentősen. Most a fejlesztők előtt, úgy tűnik, kijött, hogy a tabletta nem
Válasszon egy modern tablettát
A számítógép könyvétől PDA N148 (12/03 / 2011-09.12.2011) Szerző "Computerra" kompozícióA modern tablettát választjuk ki: Oleg Nechazublished december 06, 2011 Az iPad Tablet piacon megjelenő megjelenése örömmel találkozott, sok meglepően minden más laptop gyártója. Az a tény, hogy az érintőképernyős tabletta soros
Fürdőkád: Tablet és asztali osztály
A Számítógép könyvétől PDA N137 (09/24 / 2011-30.09.2011) Szerző "Computerra" kompozícióFürdőkád: Táblázat: Tablet és asztali Szerző: Fürdők Michaeloplished 2011. szeptember 27-én Nyár nyomtatásban, főleg észak-amerikai, ismét számos előrejelzés volt a klasszikus asztali személyi számítógép sírjára. Emelje fel K.
A szerző könyvétőlVezethető háborús időszak - Műveletek német-osztrák frontban: Galicia csata és kelet-porosz művelet
A szerző könyvétőlVezethető háborús időszak - Műveletek német-osztrák frontban: Galicia csata és kelet-porosz művelet
A szerző könyvétőlVezethető háború - Műveletek német-osztrák frontban: Galicia csata és kelet-porosz művelet az első utazás előtt Kelet-Poroszországba, Nagy herceg Nikolai Nikolayevich kijelentette, hogy készen áll a berlini mozgásokra négy hadseregre: az első kettő
Vezethető háborús időszak - Műveletek német-osztrák frontban: Galicia csata és kelet-porosz művelet
A szerző könyvétőlModell "Tablet"
A könyvből egy könyv-ajándék, a szépség tisztességes királynője Szerző Kriksunova Inna AbramovnaA tabletta modell egy merev táska, amely függőlegesen feszített téglalap formájában. A tabletta a zsák egy repülő szelep, teljesen vagy részlegesen kapaszkodik a zsák, az alján ez a szelep a rögzítőelem zár. Ez a modell táska hosszú
 A váltakozó aktuális LED-eken alapuló világítóberendezések megtalálják a résszel, és meghaladhatják a korlátait.
A váltakozó aktuális LED-eken alapuló világítóberendezések megtalálják a résszel, és meghaladhatják a korlátait.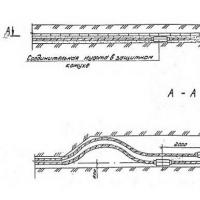 Követelmények és árak a Föld alkalmazási köre, Fogalommeghatározások
Követelmények és árak a Föld alkalmazási köre, Fogalommeghatározások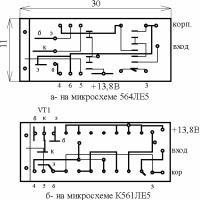 Automobile stroboszkóp lézeres mutatóból
Automobile stroboszkóp lézeres mutatóból Rendelje meg a 20 UAH-t a fiókhoz. Hogyan kell kölcsönzeni az MTS-en. További információk a szolgáltatással kapcsolatban
Rendelje meg a 20 UAH-t a fiókhoz. Hogyan kell kölcsönzeni az MTS-en. További információk a szolgáltatással kapcsolatban Hogyan ellenőrizze a fiók feltöltését
Hogyan ellenőrizze a fiók feltöltését Hogyan lehet kölcsönt a Tele2-en?
Hogyan lehet kölcsönt a Tele2-en? Válaszhatatlan SSD egy miniatűr fórumon, amit SSD meghajtó vásárolni
Válaszhatatlan SSD egy miniatűr fórumon, amit SSD meghajtó vásárolni