En utilisant un radar pour la divergence. Un algorithme d'action exemplaire de manœuvre lorsque vous travaillez avec une tablette manœuvrable de comprimé de tablette pour mesurer la vitesse
Type de document: Boîte à outils | Doc.
Popularité: 0,23%
Pages: 16.
Langue: Ukrainien russe.
Année de publication: 2005.
Methodichn à la vkazіvki Traca à Vincanya Roboti RLOB З DISCILIPLIN "Expérience de Tacher і ZARP" pour StudentIV 4ème cours en Autentia en Ukraine invitale
Chaque élève selon son option effectue 5 tâches sur la forme d'une tablette maniable et répond à 2 questions sur une feuille séparée. Les formes de comprimés maniables avec des tâches résolues et une liste avec des réponses sont introduites dans un dossier séparé.
La version du travail de test est sélectionnée en fonction du dernier chiffre du chiffre personnel.
N ° d'option № Tâches Nombre de problèmes
1 1, 11, 21, 31, 41 1, 11
2 2, 12, 22, 32, 42 2, 12
3 3, 13, 23, 33, 43 3, 13
4 4, 14, 24, 34, 44 4, 14
5 5, 15, 25, 35, 45 5, 15
6 6, 16, 26, 36, 46 6, 16
7 7, 17, 27, 37, 47 7, 17
8 8, 18, 28, 38, 48 8,18
9 9, 19, 29, 39, 49 9, 19
10 10, 20, 30, 40, 50 10, 20
Pour l'exécution compétente des travaux de test, il est nécessaire d'explorer les règles n ° 5, 6, 7, 8, 9, 10 des MPPS-72, ainsi que de brèves instructions méthodiques sur la solution graphique de tâches sur la tablette maniable.
Sur la page Titre du dossier de test, spécifiez le nom, prénom, Pratiqueymic d'un étudiant, numéro de chiffrement personnel, nom de discipline, cours, numéro d'option, spécialité.
Le travail effectué dans la période prescrite est transmis pour vérifier l'enseignant.
Un étudiant est autorisé à tester, qui a effectué des travaux de contrôle et de laboratoire.
Brèves instructions méthodiques sur la solution graphique de tâches sur la tablette manœuvrable.
La procédure de résolution du problème des divergences avec un navire
sur une tablette maniable
(Voir Annexes 1, 2)
Les conditions de visibilité limitée sont les conditions particulières de natation, donc la discipline "Simulator radar" et le "SARP Simulator" suggèrent qu'il y a d'abord de nager dans ces conditions.
Lors de la baignade avec une visibilité limitée à la mer ouverte, une vue d'ensemble des environs à l'aide de radar est fabriquée principalement sur des échelles d'échelle 12 à 16 milles, et cette distance est probablement une distance de la détection de la plupart des navires.
Bonne pratique maritime pour résoudre le problème des divergences avec les tribunaux de la mer ouverte, recommande de scinder l'écran RLS en trois zones:
1) la zone d'évaluation de la situation de 12 à 8 milles, où le degré de risque de collision, les paires de mouvements du mouvement des navires venant en sens inverse sont déterminés et la manœuvre perd;
2) Zone de manœuvre de 8 à 4 milles. Les actions pour les divergences sont recommandées pour prendre le plus tôt possible après la mise en place du risque de collision;
3) Zone de rapprochement excessif à partir de 4 miles. Avant l'entrée de l'écho du navire dans cette zone, la manœuvre de divergence à la mer ouverte devrait être terminée de manière à ce que, lors de la modification de la situation à la suite de manœuvres incorrectes des navires, il y avait du temps et de l'espace pour éliminer le risque de collision.
Lors de la nageant dans les conditions de visibilité limitée des tribunaux privilégiés, il n'existe aucun devoir de prévenir la collision et la priorité suivante des manœuvres est attribuée à chaque navire avec RLS.
1. Tournez à droite;
2. réduire la vitesse;
3. Arrêt du navire;
4. Tournez à gauche.
La principale hypothèse de résolution du problème des divergences sur une tablette maniable (tablette situationnelle) et à l'aide de SARP est l'immuabilité des paramètres de mouvement (cours et vitesses) de son propre navire et d'autres navires pour la période d'ensemble des informations et résolvez le problème.
Le moment a commencé à résoudre le problème - le moment du début de la divergence, le "point zéro" est le moment de supprimer la première référence de la direction de la direction et de la distance au premier objectif.
Le temps de retour aux paramètres initiaux du mouvement de leur propre navire est le moment de la fin de la différence.
Lorsque le radar est allumé, il est nécessaire de régler correctement la luminosité et l'amélioration du récepteur, et si nécessaire, réduire les effets de l'interférence de l'excitation et des précipitations.
La procédure de résolution du problème des divergences sur une tablette maniable:
1) Du centre de la tablette, tenez le vecteur de déplacer votre propre navire en 6 minutes, vn.
2) Faites des entrées dans la table de traitement des informations radar sur le cours (CN) et la vitesse (VN) de votre propre navire.
3) Du centre de la tablette par le rayon de Dzad. Cercle. Recommandé avec une visibilité limitée à prendre dans les conditions de la mer ouverte DZAD. \u003d 1,5 ÷ 2 miles et dans les eaux à crampes des DVD. \u003d 0,5 miles.
4) Regarder la situation sur l'écran RLS pour sélectionner sur la modification des coordonnées polaires relatifs (ΔP ≈ 0 et ΔD 5) de l'écran RLS pour éliminer les références du roulement et la distance du navire dangereux d'écho, lancez le chronomètre, Notez l'heure du navire, apportez des enregistrements dans les informations de radar de la table de traitement pour le point de temps zéro 0 ا, porteur et distance du navire A.
6) Selon ces données, mettez la situation initiale sur la tablette manœuvrable, faisant référence au numéro de point zéro 0 ا et à la grande lettre A.
7) En utilisant la règle parallèle pour envoyer (bâton) le vecteur de déplacer le propre navire en 6 minutes VN dans le point zéro et a commencé à désigner la lettre F (fixe), le vecteur désignait la lettre VN.
8) effectuer une partie du cercle dans la zone du point zéro, à droite et à gauche de celui-ci (ou de cercle) avec un rayon de VN du centre F, qui accélérera la solution graphique du problème.
9) À la 6e minute, retirez les références du roulement et de la distance d'écho du même navire et de les écrire dans la table de traitement des informations radar.
10) Selon les données obtenues, appliquez un point de 6 minutes sur une tablette maniable, ce qui l'indique avec un nombre 6 ا.
11) Connectez le point zéro et de 6 minutes directement pour déterminer le vecteur de mouvement de la cible relatif en 6 minutes. La flèche Vector est destinée à un point de 6 minutes. Dénote ce vecteur vo.
12) Étendez le VOPE VOON au centre de la tablette, nous obtenons une trajectoire de log - une trajectoire qui déplacera l'écho du navire et avec l'immuabilité des cours et des tarifs de votre propre et de votre propre cycle.
13) Du centre de la tablette sur le journal, omettez perpendiculairement et retirez la valeur DCR.
14) Déterminez le vecteur graphique VO du point zéro à la base de la ligne perpendiculaire de la ligne DCR la convergence la plus courte des navires de TKR.
15) Les valeurs résultantes des enregistrements DCR et TKR sur la tablette maniable.
16) Connectez le point F avec un point de 6 minutes directement, nous obtenons une cible de 6 minutes VC VC, dirigée dans un point de 6 minutes, désignez VC VC.
17) en utilisant une règle parallèle et un mètre pour déterminer le parcours véritable et la vitesse de l'objectif de navire A, faisant des enregistrements sur une tablette maniable;
18) Appliquer le point préventif (12 minutes est recommandé, en tenant compte de l'heure définie sur le temps (TN.I. \u003d 6 min., Résoudre le problème de TR.Z. \u003d 3 min. Et effectuer une manœuvre TM \u003d 3 min) et passer des lignes pointillées de Tangents au cercle du rayon du Dzad. Nous obtenons des villages pour lesquels les échos du navire devraient se déplacer lors d'une manœuvre. Sur le dessus, le latéral sera laissé du navire et inversement.
19) À partir d'un point de 6 minutes pour dépenser la ligne parallèle à des années dans la direction opposée pour déterminer le secteur des cours dangereux (jus), au-delà de laquelle vous devez retirer la fin du vecteur VN pour résoudre le problème de la différence. Si le point F est dans le jus, il est impossible de résoudre le problème de la divergence avec une diminution de la vitesse.
20) Sélectionnez une manœuvre de divergence efficace à une distance de sécurité et la variation du cours et / ou de la vitesse doit être assez grande afin qu'elle soit remarquée par le navire venant en sens inverse. Tourner la manœuvre, en général, à droite, devrait être d'au moins 30 à 45º et la réduction de la vitesse doit être d'au moins la moitié.
La manœuvre combinée change dans le cours et la vitesse dans la pratique est rarement appliquée en raison de la détérioration de la gestion de la récipient lorsque la vitesse est réduite.
Selon les exigences de la règle 19 MPPSS-72 "... autant que possible à éviter:
- changements à gauche, si un autre navire est en avance sur la traverse et n'est pas dépassé;
- changements dans la direction du navire situé sur la traversée ou derrière la traverse ";
- Il convient également de prendre en compte les restrictions sur le radar en raison de laquelle l'écho du navire à gauche peut ne pas être observé à l'écran.
Méthode de bande graphique
Le joint graphique donne des informations plus précises sur la situation des tribunaux et est effectuée sur une tablette maniable M-78 (Fig. 212)
La discordance consiste en: 1) l'application de la situation initiale sur la tablette et la construction de triangles de vitesses de vecteurs de vitesse relatives;
2) estimations de la situation d'un rapprochement dangereux (collision) avec des tribunaux, dont les échos sont observés sur l'écran RLS, en calculant le temps des plus courtes convergence / kr, intersection / "EP, la distance de la convergence la plus courte de la DPR et identifier leurs dangers réels et potentiels;
3) le choix et la justification de la manœuvre, l'allocation de navires avec laquelle il est nécessaire de se disperser;
4) Calcul de la manœuvre sélectionnée en utilisant la reconstruction graphique des triangles de vecteur de la situation initiale;
5) Calcul de l'heure du début de la manœuvre (en tenant compte des éléments manitionnels
Le navire), le temps préventif (3 ou 6 minutes) est sélectionné, la distance de divergence, le temps des divergences et la distance de son cours initial lors de la manœuvre;
6) appliquer la ligne attendue de mouvement relatif (ancien) et un contrôle ultérieur sur le mouvement de l'objectif (navire observable).
Considérez en détail le processus de résolution du problème de la divergence avec l'aide de graphique (radar) posant sur une tablette manœuvrable.
1. Pour la commodité des calculs, l'intervalle de temps prend 3 ou 6 minutes, t. 1/20 ou 1/10 h.
2. Construisez sur la tablette de son vecteur central bien sûr et la vitesse de VL de notre navire.
![]()
Figure. 213. Solution du problème de divergence avec la ponte graphique
![]()
Figure 214 Détermination du danger potentiel et de l'emplacement du navire, pour des divergences avec lesquelles il est nécessaire de faire une manœuvre
3. Avec l'apparence de l'écran RLS des signaux d'écho, nous déterminons leurs delers et leurs distances et s'appliquons à la tablette.
4. À intervalles de temps égaux (3 ou 6 minutes) dans la séquence précédente, nous appliquons les points suivants et après leur composé, nous obtenons les vecteurs de vitesse relative.
5. Avec ces vecteurs, nous construisons des triangles de vecteur, pour lesquels la VC de votre navire du centre de la tablette est transférée au premier point L en connectant le début de son vecteur VC avec le deuxième point 2, nous obtenons le vecteur de vitesse du navire observé w
6. Les points de connexion de ligne 1 et 2 seront vendus pour le centre de la tablette, nous allons obtenir LOD.
L'évaluation de la situation est de déterminer le degré de danger de la collision des tribunaux. Nous trouvons le DKP de distance la plus courte, abaissant perpendiculairement du centre de la tablette à LOD et le point d'intersection du cours du cours cible DNEP, pour lequel nous effectuons une ligne du centre de la tablette, parallèlement au vecteur de vitesse du "Cour-sur-objectif de traverser
L'identification de la vitesse potentielle des navires peut être effectuée de deux manières:
1) Nous perdons la manœuvre de notre navire (VC) ou de notre navire-but (V ") et de déterminer en changeant la transition de LOD et VO après un danger potentiel en réel. Changer le cours, la vitesse ou la manœuvre combinée de notre navire à droite aggrave la situation avec le navire "B". Dans ce cas, la manœuvre est nécessaire avec le navire "B" (Fig. 214);
2) Utilisation des caractéristiques du mouvement des signaux d'écho dans le mouvement relatif de l'écran RLS, qui a été démonté en détail avec la méthode d'évaluation visuelle.
Pour sélectionner et justifier le type de manœuvre, toutes les options possibles sont perdantes: modification du cours, de la vitesse ou autre en même temps, tous les facteurs associés à la natation en une visibilité limitée, les fonctionnalités de navigation de la zone de plongée, les MPSS-72 et la capacités maniables de leur vaisseau et un éventuel objectif de manœuvre. Le navire doit s'efforcer d'une divergence sûre avec une option acceptable de calculer la manœuvre à l'aide d'une palette et d'une règle. Il minimise le travail graphique sur un ou deux navires. En figue. 215 Calculer la manœuvre pour une divergence sûre en changeant son cours vers la droite. La position des points préemptés n'affecte pas la méthode de calcul à l'aide des triangles de vecteur de la situation initiale. Il faut toujours oublier que le moment du point préventif est le moment convenu de la fin de la manœuvre.
Le moment du début de la manœuvre de son navire est calculé en tenant compte des éléments manitionnels du navire (inertie, freinage, tournage, etc.).
![]()
Figure. 215 Calcul de la manœuvre pour des divergences pour changer le cours vers la droite; Le calcul est fait avec le navire "B"
Dans le triangle de vecteur du vecteur "A" Vector de notre vitesse, tournez à droite à l'angle calculé. Nous obtenons un nouveau vecteur de Velocity Vo Relatif et connectez le point _2 avec la fin du vecteur VQ en rotation. En parallèle, les vecteurs de la vélocité relative V "O du point préventif que nous effectuons le" A ". Le point préventif est pris dans le même intervalle de temps. Après cela, il est possible de déterminer le temps de divergence des navires TICPX et la distance de déchets D0TX du cours de notre vaisseau (voir Fig. 215).
Pour calculer, nous utilisons le nouveau vecteur de vélocité relative w la distance de déchets est calculée sur la tablette. Pour ce faire, sur la ligne de notre nouveau parcours, déposé du centre de la tablette, nous repoussons la distance que notre navire passera pendant la divergence. Ensuite, du point qui en résulte, omettez perpendiculairement à la ligne du cours initial. Le segment de cette perpendiculaire sera la distance entre le parcours de l'échelle de la tablette.
Le résultat de la manœuvre est contrôlé par un exploratoire. Non seulement le navire est appliqué à la tablette, par rapport à la manœuvre, mais également d'autres navires, qui représentent un danger potentiel. Ces lignes du mouvement relatif attendu sont effectuées pour contrôler la situation en développement après la manœuvre, afin de détecter la manœuvre d'autres navires de manière opportune, ainsi que dans le cas d'erreurs dans les calculs et les bâtiments graphiques.
De ce qui précède, nous constatons que les deux méthodes sont interdépendantes et se complètent mutuellement, garantissent des problèmes de résolution de la divergence sûre des tribunaux utilisant des radar dans des conditions de visibilité limitée.
Sur certains navires au-dessus de l'écran RLS, une tablette miroir est installée. Il s'agit d'un dispositif auxiliaire qui est un système optique non paraxus. L'avantage de la tablette miroir est qu'il permet de mener un joint graphique sans interrompre les observations sur l'écran RLS.
Améliorer périodiquement les qualifications, les propriétaires de navires de la flotte marine transmettent des enseignements pour résoudre des problèmes de simulateurs radar.
En raison de l'impossibilité des actions convenues des navires (navires) dans des conditions de visibilité limitée, le nombre de divergences est donné dans l'IPTSU non sous forme catégorique, mais sous la forme de recommandations. Conformément à la règle 19 p. Le navire qui a trouvé un autre navire avec un radar doit d'abord déterminer s'il existe un risque de collision. "S'il y a des doutes sur le danger de la collision, il convient de supposer qu'il existe" (règle 7 p. "A").
Choisir une manœuvre pour éviter un rapprochement excessif dépend de la situation. La manœuvre peut fournir un changement dans le cours, la vitesse, ainsi que l'autre en même temps. Changer le cours et la vitesse devrait être significatif. De petits changements cohérents dans le cours et la vitesse créent des difficultés pour interpréter des informations radar sur un navire de compétition. Sous le changement de vitesse, il convient de comprendre pour réduire ou arrêter les machines, car l'augmentation de la vitesse dans les conditions de visibilité limitée est contraire aux règles.
Tableau 18.2. Données tactiques et techniques de certains radar de navigation

La manœuvre n'est qu'un changement dans le cours est efficace si le changement de cours est effectué à l'avance lorsqu'il y a suffisamment d'espace d'eau et lorsque cette manœuvre ne provoque pas de convergence excessive avec d'autres navires. Le choix du cours du cours du cours est fourni au commandant du navire, cependant, les règles recommandent d'éviter:
Changements à gauche lorsque l'autre navire est devant la traverse, si ce navire n'est pas dépassé;
Changements dans la direction du navire situé sur la traverse ou derrière la traverse.
Analyse de la situation et la définition des éléments du mouvement de la cible (EDC)
Une analyse de la situation à l'aide d'une tablette maniable est effectuée comme suit (Fig. 18.1):Le lieu de son navire est considéré dans le centre de la tablette;
Sur les roulements et les distances, mesurés par un radar après 1-2 minutes, sont appliqués à la tablette au moins deux endroits de la cible;
À travers les points obtenus M1, m2, m3 maintient la ligne de mouvement relatif de LOP1;
Du centre de la tablette à Lod1, la perpendiculaire de la COP1 est abaissée, dont la longueur est la différence la plus courte de DKV.
Si DKP est plus de doses, la menace de rapprochement excessivement (dangereux) n'est pas. Des calculs et des manœuvres supplémentaires ne seront pas nécessaires avant que la cible change le cours ou la vitesse.
Si DKP est moins de doses, la définition de l'EDC est déterminée:
Du point au vecteur de la vitesse de son véhicule vk;

Figure. 18.1. Une analyse de la situation, la définition de l'EDC et le calcul de la manœuvre des divergences avec un seul objectif sur la tablette maniable
- à partir de la fin du vecteur VK, une ligne est effectuée, parallèle LOD1 sur cette ligne, le vecteur de la vitesse relative du VP dont est calculé par la formule

- Connecter le point à l'extrémité du vecteur VR, le vecteur de vitesse VM est obtenu;
Temps rapide avec vue sur la distance la plus courte

Pour analyser la situation et définir l'EDC sur une tablette manœuvrable à l'aide de la carte "Palma", les étapes suivantes sont effectuées:
La tablette maniable est placée sur la table et coordonne l'échelle des gammes fixes de gamme (NKD) avec des comprimés;
Sur les cercles de la tablette, les distances inscrivent et éteignent la NKD;
Passez une ligne du cours du navire sur la tablette (comptant votre navire au centre) et combinez-la avec un cours de marquage de l'image;
Fixer la tablette et appliquer les premiers endroits des objectifs observés;
Après 1-2 minutes, ils sont appliqués à la tablette au moins deux à trois endroits de chaque objectif;
Mener des lignes de mouvement relatif de chaque cible.
En localisation de la LOD et de la taille du DKP, les objectifs avec lesquels une convergence excessive est possible. Le traitement ultérieur des informations pour le calcul de l'EDC peut être effectué, comme indiqué ci-dessus. Pour accélérer la réception de l'EDC, la réception suivante est poussée:
Comprimé avec des buts imprimés a reculé sur le taux de la quantité passée par le navire pendant l'observation de la distance;
Appliquez de nouvelles cibles, déplaçant la tablette à chaque fois la tablette au taux de la distance parcourue;
En connectant le bon endroit des objectifs, les vecteurs de la véritable vitesse de chacun d'entre eux sont dirigés par les points précédents des points suivants;
La magnitude des vecteurs vigeurs véritables est calculée, comme d'habitude, à travers la distance et l'heure des observations.
La méthode spécifiée est moins précise que la précédente, mais vous permet d'apprécier rapidement la situation lors de la rencontre avec plusieurs navires.
S'il y a un véritable mouvement en mode radar, il est possible de recevoir l'EDC directement à partir de l'indicateur et de détecter rapidement leur changement. Toutefois, sur l'indicateur en cours d'exécution en mode VRAI Motion, la définition de DKP et de TKR est donc difficile, donc de déterminer avec précision ces valeurs, il est nécessaire de passer au mode de déplacement relatif.
La définition de l'EDC sur une grande carte de (1: 50 000; 1: 25 000) est produite dans les relations de navigation, où le calcul de la manœuvre de divergence ne peut conduire à un parcours dangereux. Dans ce cas, le navigateur a la possibilité de placer le joint pour lui-même et pour la cible en mouvement absolu sans se séparer de la situation de navigation. Dans le cas de l'utilisation de l'auto-supporter, il est possible de disposer des coordonnées actuelles de son navire pour conserver un joint à plusieurs fins et observer clairement la situation.
Les principaux inconvénients de la méthode: l'incapacité de déterminer rapidement le risque de collision; La distance la plus courte du but DKP directement à partir du joint ne peut être obtenue; Sur la carte, vous ne pouvez appliquer que le point d'intersection des vrais cours. Par conséquent, simultanément avec le joint dans le mouvement absolu, l'analyse de la situation et des calculs à la différence est recommandée pour produire sur une tablette manœuvrable par le préfixe "Palma" avec la vérification des écarts sur la carte.
Calcul et contrôle de la manœuvre de divergence avec un seul objectif sur une tablette maniable
S'il y a une menace de rapprochement excessivement, c'est-à-dire lorsque DKP est inférieur à DOS, vous devez modifier le cours ou la vitesse de votre navire afin que le but passe du centre de la tablette (points K) à une distance de plus que D03. Pour calculer la manœuvre sur la tablette, les actions suivantes produisent (Fig. 18.1):Calculer et appliquer à Lod1 la position préventive de l'objectif de VC; La magnitude de m3mc \u003d VRTC, où TZ \u003d 2-4 min, en fonction de la formation de l'opérateur;
Du point de vue du MC, la tangente à la circonférence de la tablette, correspondant à la distance prédéterminée D03 et au tableau de discordance; recevoir une nouvelle gamme de mouvements relatifs de l'objectif de LOD2;
Deux nouveaux triangles à grande vitesse sont construits, pour lesquels, à partir de la fin du vecteur VM, la ligne est effectuée dans la direction opposée, Lod2 parallèle (sur la figure 18.1 est indiquée par une ligne pointillée), jusqu'à l'intersection avec un cercle d'une tablette correspondant à VK;
Des deux vecteurs du QC "et KK" choisissent celui dans lequel le vecteur de vélocité relatif vecteur sera plus important en valeur absolue et le taux de CC "conduira rapidement à une divergence avec l'objectif.
De même, la manœuvre est calculée en changeant la vitesse du cours. Après avoir tourné vers le cours calculé (changement de vitesse) des observations, l'objectif se poursuit et la commande de manœuvre est contrôlée en appliquant des endroits cibles sur la tablette. Si le lieu de but tombe sur la ligne Lod2, la manœuvre est effectuée correctement. Si le lieu de la cible M5, M6, M7 repose sur la ligne Lod3, parallèle Lod2, cela signifie que le virage a commencé plus tôt que l'heure calculée et que la différence se produira à distance, supérieure D03. Changez la direction de LOD, c'est-à-dire le déplacement du lieu de but dans une direction, indique une modification de l'EDC, qui nécessitera de nouveaux calculs.
Caractéristiques de l'utilisation de Hollc "Ocean"
Comprend le radar "océan", il existe un dispositif informatique qui permet (après la capture manuelle de l'écho cible) de déterminer DKP, TKR et EDC. La précision de la calculatrice est caractérisée par les valeurs suivantes:DKP est déterminé avec une précision de 2-3 cabine;
TCR est déterminé avec une précision d'environ 2 minutes;
Le cours du navire venant en sens inverse est déterminé avec une précision de 5 à 10 °, un trait de 0,5 à 1 tonnes.
Calcul, une manœuvre divergente est faite sur une tablette maniable, comme indiqué ci-dessus. Le dispositif informatique vous permet d'imiter la manœuvre sélectionnée (à «perdre» à l'avance) et d'estimer les résultats possibles, tandis que LOD est mis en surbrillance sur l'écran Indicateur.
Les principales options pour les divergences avec un seul objectif sont données au § 23.11.
Calcul sur la tablette maniable de la manœuvre de divergence avec plusieurs objectifs en même temps
Une manœuvre de divergence avec plusieurs contre-navires est simultanément la plus difficile, mais la nécessité de cela se produit de plus en plus, en particulier dans les zones d'expédition animée. Jusqu'à présent, les méthodes de calcul de cette manœuvre sont basées sur l'utilisation de palettes spéciales, cachées de l'opérateur la signification physique de la manœuvre et ne sont donc pas vaccinées sur la flotte.Le plus rationnel est le calcul avec la construction des secteurs de cours relatifs dangereux proposés par O. G. Morava. Le calcul de la manœuvre dans la méthode proposée est effectué comme suit (Fig. 18.2):
Avec la détection sur l'écran des contre-films (objets n ° 1, 2, 3), ils mènent à chacun d'eux un joint relatif sur une tablette maniable;
Après avoir effectué le LOD2 et LOD3, pour révéler le risque de rapprochement excessif avec un ou plusieurs objectifs, déterminez leur EDC (VM1, VM2_ et VM3);
Pour la cible avec la vitesse maximale relative (rapprochement avec lequel le DCR se produira plus tôt) Attribuez le moment de son arrivée en position préventive et est appliqué à ce moment-là des positions de chaque cible de 1 mc, 2 MC, HP;
De la position de prétexte de chaque objectif, les tangentes sont effectuées par la circonférence du DOS, déterminant le secteur dangereux (OS) de chaque cible;
À la fin de chaque vecteur de la véritable vitesse de la cible VM1, VM2, VM3 construisent un secteur de cours relatifs dangereux;
Pour une divergence sûre avec tous les objectifs, changez simultanément leur cours ou la vitesse de sorte que la fin de son vecteur de vitesse vk soit hors de la cuisson.

Figure. 18.2. Calcul d'une manœuvre de divergence avec plusieurs objectifs simultanément sur une tablette maniable
En figue. 18.2 On peut voir qu'une diminution de la vitesse à la valeur de V "K vous permet de se disperser avec tous les objectifs sur DKP plus dow. Si la fin de son vecteur vecteur vv allumera sur la frontière COP-1, puis le divergence dans le but de n ° 1 se produira à la distance de la DOW et avec d'autres - à une distance plus grande. Si la fin de son vecteur de vitesse V "" K sera au point d'intersection des côtés de la SOK -2 et la COP-3, puis la divergence sur le DOW aura lieu avec ces deux buts et avec le numéro cible 1 - à une distance supérieure. Options calculées pour les divergences qu'elles sont signalées par le commandant de navire pour sélectionner et approuver l'un d'eux . La fin de la manœuvre des divergences avec tous les objectifs peut être considérée comme le moment de venir le dernier d'entre eux à une traverse relative.
* En mode de fonctionnement automatique, la précision de la définition de la roulement et de la distance de la RLS "océan" à des distances allant jusqu'à 16 milles est respectivement de 0,5 à 0,7 ° et 30 à 40 m, respectivement.
Avant
Table des matières
Dos
Joint d'étanchéité sur une tablette maniable.
1. VRAI Joint.
Un tel joint peut être effectué directement sur une carte de navigation de voyage à grande échelle ou une feuille de papier. L'essence de la méthode est la suivante. Après avoir trouvé un signal d'écho d'un autre récipient sur l'écran de l'indicateur, il est déterminé par son roulement P1 et la distance D1, ils laissent le chronomètre, remarquez le T1 du navire, le cours de sa jonction du CN et le compte à rebours de Laga OL1. L'emplacement de l'écho A1 est appliqué le long du roulement et de la distance par rapport à son emplacement, après avoir sélectionné l'échelle souhaitée (Fig. 1). Après une certaine période de temps (pour les calculs, l'intervalle dans 3 ou 6 minutes) Les observations sont répétées (P2, D2, T2, OL2) et les emplacements de leur navire 02 et le récipient observé A2 sont causés. Après avoir dépensé à travers les points A2, et A2, une ligne droite, nous obtenons une ligne de véritable mouvement de l'objectif du CC.
Par la distance entre les points A 1 et A2 et l'heure de T1 et T2, vous pouvez déterminer la vitesse de la VC cible et calculer quand et à quelle distance il traverse le cours de notre navire et de la DDP.
Pour déterminer la distance de la convergence la plus courte de DKR et de temps, le TCR du point A2 est reporté sur le côté opposé à son parcours, naviguant sur le navire lors des première et seconde observations A2F \u003d O1O2. Le segment O1C effectué perpendiculaire à la ligne passant à travers les points A1, et F sera la distance de la convergence la plus courte. L'emplacement des tribunaux au moment de la convergence la plus courte (points O1 et A4) peut être trouvé dans le mouvement parallèle du segment de O1C à O4A4. Temps rapide pour la distance la plus courte

Pour déterminer les circonstances de la réunion et des éléments du mouvement d'un autre navire, deux observations suffisent. Cependant, afin d'exclure les victimes des observations et de s'assurer que les éléments de l'autre mouvement de navire dans la période d'observation sont invalides, il est recommandé d'augmenter le nombre d'observations. Trouver les trois cibles appliquées de temps en même temps (A1, A2, A3) Intervalle de temps (A1, A2, A3) sur une directe et égalité des distances A1A2 \u003d A2A3 indiquent à la fois l'absence de manquences dans les observations et l'inadéquade de les éléments du mouvement cible pendant T1 à T3.
Les avantages de la méthode de véritable joint doivent être attribués à sa visibilité. L'inconvénient est la complexité relative des constructions graphiques nécessaires pour déterminer les principales circonstances de la réunion: la distance du rapprochement le plus court et du temps.
2. Joint relatif.
Ce joint a gagné généralisé, car les principales questions sont rapidement et facilement résolues: la distance la plus courte est l'essai et après quelle heure. Avec une pose relative, les circonstances de la réunion et les éléments du mouvement d'objectif dans le système de coordonnées mobiles, dont le début est pris à l'emplacement du navire d'observateur. Cela correspond à la photo réelle que le navire est observé sur l'écran de l'indicateur de mouvement relatif.
Du point de vue de la place de son vaisseau, posez les observés P1 et P2 et P2, et la distance D1 et D2 (Fig. 2), à travers les points obtenus A1 et A2 sont effectués par LOD. La longueur de la perpendiculaire du système d'exploitation, abaissée du point du mouvement relatif, est dans la distance d'échelle sélectionnée de la convergence la plus courte de DKR. Temps rapide pour la distance la plus courte


Avec la pose relative, la distance dans laquelle l'objectif traversera le cours de notre navire est également déterminé rapidement. Pour ce faire, il suffit de mesurer la distance de l'OP. (Si LOD passe dans notre nez, déterminez le point d'intersection du but de notre cours, et si le LOD passe dans notre alimentation - le point de l'intersection de notre objectif de navire, pour lequel le centre de la tablette est effectué avec une ligne parallèle à l'intersection avec LOD). L'heure d'intersection du TPER sera déterminée en ajoutant au témoignage des montres de navire au moment de la recherche de l'emplacement du signal d'écho au point A2 de l'intervalle de temps:

Il est nécessaire de rappeler que, tout d'abord, le vésphodent doit déterminer les principales circonstances de la réunion, c'est-à-dire DKR et TKR, puis définissez les éléments du mouvement des objectifs.
Le véritable mouvement de la cible est la somme de deux mouvements - relative
Et navire d'observateur ou
Compte tenu de la commutativité de la somme des vecteurs ![]() peut être trouvé
peut être trouvé
Deux façons.
Construire un triangle vecteur (voir Fig. 2), montré par des lignes solides, est appelé droit. Sous, le début des vecteurs de vitesse (lignes de chemins) déposés dans la direction du mouvement des vaisseaux sont à un moment donné.
Une construction inverse est également utilisée, dans laquelle les vecteurs qui sont reportés vers le mouvement des tribunaux sont convergés avec leurs extrémités au point commun (montré par la ligne pointillée).
À l'avenir, nous utiliserons principalement une construction directe, car il est plus pratique lorsque vous résolvez les tâches de discordance.
La longueur du vecteur de mouvement du navire doit être égale à l'échelle sélectionnée de nager son navire lors des observations prises pour construire un triangle vecteur. La longueur du vecteur cible obtenu correspond à nager la cible pendant les observations.
3. Tablette maniable.
Une tablette maniable est une grille de coordonnées polaires. Pour accélérer les colonies associées à la natation, le navire au cours des observations, une balance logarithmique est placée sur une tablette manœuvrable. Il est construit comme suit: Démarrage droit du point de départ de certaines échelles, les segments sont reportés égaux à des logarithmes décimaux de nombres de 0,1 à 60 et numérisés dans les valeurs de ces chiffres. Étant donné que dans les 60 unités d'action avec des minutes sont similaires aux actions avec des chiffres dans un système décimal, tout échantillon sur l'échelle peut être attribué le nom "temps", "distance" ou "vitesse" et dans les valeurs bien connues de deux d'entre eux pour trouver le troisième, résoudre la proportion
https://pandia.ru/text/80/090/Images/image012_74.gif "largeur \u003d" 331 "hauteur \u003d" 26 "\u003e
Lors de l'utilisation d'une échelle logarithmique, il convient de rappeler que les pieds "haut" de la circulation (installé sur les grands comptes) affichent toujours l'heure et le "inférieur" (installé sur des nombres plus petits) - vitesse et distance.
Depuis les observations, il y a un mouvement relatif de la marque - 2,2 milles en 8 minutes. Trouver une vitesse relative.
Nous mettons la jambe inférieure de la circulation de la division 2.2 et la section supérieure de l'échelle "8";
sans modifier la solution de circulation, nous déplacons la jambe supérieure de la circulation pour diviser la balance "60". La jambe inférieure de la circulation montrera la vitesse relative vo \u003d 16,5 uz.
t \u003d 17 min, v \u003d 15 uz. Trouver la distance S.
Nous mettons les pieds supérieurs de la Circula sur la division "60", le "15" inférieur sur "15";
sans changer la solution circulaire, nous déplacons les pieds supérieurs de la circulation pour diviser la balance "17". La jambe inférieure de la circulation montrera la distance s \u003d 4,3 miles.
Avec V \u003d 17, le navire a passé S \u003d 8,7 miles. Déterminez le temps pour lequel le navire passe cette distance.
Nous mettons les pieds supérieurs de la Circula sur la division "60" et le fond - sur la division de l'échelle "17";
sans modifier la solution de zircule, nous mettons la jambe inférieure de la circulation pour diviser la balance "8.7". Les pieds supérieurs de la circulation montreront l'heure T \u003d 31 min.
4. Choix et justification de la manœuvre pour des divergences dans une distance donnée.
Si DKR< Dзадто необходимо предпринять маневр для расхождения с судном-целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию и выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя tкр, VO и Dзад, выбирает время начала маневра. Последующая графическая прокладка служит для проверки безопасности выбранного маневра и уточнения его величины.
Le joint graphique pour justifier la manœuvre de divergence d'une distance donnée est illustré à la Fig. 3. Il est effectué dans la séquence suivante:
sur LOD pour la durée estimée de la manœuvre ou sur la distance voulue de la manœuvre, le point de l'emplacement cible au moment du début de la manœuvre de divergence;
une torsion mentale du vecteur ou du changement de sa longueur conformément à la vue sélectionnée de la manœuvre déterminer le côté de l'inversion de la durée de vie de la manœuvre;
du point m passionne sur la tangente du dzad de l'OLOD, tandis que des deux tangentes possibles au DVAD, celle qui correspond à celle correspond au bord de l'inversion de LOD avec la forme choisie de la manœuvre;
À travers la fin du vecteur, parallèlement à l'ancienne dans la direction opposée à la direction de l'ancienne, le vecteur de la nouvelle vitesse relative est effectué;
si la manœuvre est sélectionnée en modifiant le cours, la nouvelle direction du vecteur de vitesse de vitesse de l'observateur est inversée autour du point O1 avant l'intersection avec le vecteur du nouveau vecteur de vitesse relative; l'angle entre les vecteurs et déterminera l'angle souhaité de la longueur d'onde;
si la manœuvre est sélectionnée de la vitesse, le nouveau vecteur de vitesse de l'observateur est égal au vecteur du vecteur du point O1 à la nouvelle ligne de vitesse relative;
si une manœuvre combinée est sélectionnée par un cours et une vitesse, puis de trouver un nouveau parcours de la cuve d'observateur autour du point O1, le vecteur du vecteur du navire d'observateur est réduit conformément à l'AVC estimé.

5. Comptabilisation de l'inertie du navire.
Lors de la résolution de problèmes lors des chapitres précédents, il a été supposé que le navire modifie instantanément ses éléments du mouvement et de la LOD pendant la manœuvre, change fortement sa direction à la graine. En fait, c'est bien sûr pas le cas et l'inertie du navire doit être envisagée.
Comptabilité de la circulation.
Conformément au NSHP-82, les éléments de rotation sont présentés dans la table des éléments manieubles sous la forme d'un graphique et d'une table lors de la circulation d'un tournant avant complet sur le côté droit et gauche des marchandises et dans le ballast avec la position de le volant "" à bord "" (\u003d 35 °) et "sur le diplômé" (\u003d 15 ÷ 20 °). Lors de la résolution des tâches de ce chapitre, on suppose que les diagrammes de circulation représentés sur la figure seront utilisés. 4 pour manipuler le volant \u003d 20 °. Il convient de garder à l'esprit que les paramètres de la circulation réelle du navire peuvent différer de manière significative de la table en fonction de la vitesse de vitesse, de son atterrissage (rouleau et différentiel), rapport de précipitation et de profondeur, de direction et de force du vent et de la résistance du vent et de l'excitation.

Lorsque le cours est modifié par le navire-observateur (figure 5), par rapport à l'emplacement de la cible sera déplacé le long de la trajectoire curviligne du point M1 sur LOD (au moment du début de la manœuvre du navire de l'assistant) à le point f vers l'ancien (à la fin de la manœuvre). À l'avenir, l'objectif est proposé par un exploit à une distance d'un véritable mouvement relatif de l'objectif sera plus difficile. En raison de la baisse de la vitesse de la vitesse de l'observateur de navire sur la circulation de l'agent ne sera pas parallèle au vecteur V01 jusqu'à ce que notre navire compose la vitesse initiale de la course. Dans ce cas, la chute de la vitesse de la circulation compense partiellement. Dans de nombreux cas (par exemple, lorsque des divergences avec un contre-objet), en raison de la chute de la vitesse de l'observation du navire au tournant de https://pandia.ru/text/80/090/Images/Image016_68.gif "Largeur \u003d" 600 "Hauteur \u003d" 369 "\u003e
1. La méthode du cours intermédiaire relatif.
De la ponte graphique, le coin requis du cours est trouvé; De la table des éléments maniables au coin du weagilier, le temps passé par le navire à son tour, TMAN; un angle du cours intermédiaire et de la natation intermédiaire de la SPR; Du point de la position M1 de la cible à l'époque du début de la rotation est reportée au tournant; À partir de la fin du vecteur sur le côté, le parcours intermédiaire inverse, la voile intermédiaire de la SPR est reportée; À travers le début du vecteur SPR, un exploratoire est effectué en parallèle.
La méthode est exacte, mais prend du temps. Lors de la résolution des tâches des divergences sur le pont du navire ne s'applique pas. Il est utilisé dans une palette d'accidents et une référence lors de l'évaluation de l'exactitude des méthodes approximatives.
2. La méthode du point pré-dot conditionnel.
Oloda est effectuée non pas à partir du point M1 Emplacement de la cible à l'époque du début de la manœuvre et du point préventif conditionné M, renvoyé à la LOD en avant pour le moment de l'instrument de TPER. Dans la première approximation, la moitié du temps de rotation prend la moitié du temps. Ainsi, avec la méthode de prise en compte de la circulation, la rotation du récipient de l'observateur commence sur le TPER ~ 0,5 TMAN plus tôt que la cible de navire à partir duquel l'ancien a été effectué.
La méthode est la plus souvent appliquée dans la pratique. Plus précis pour les buts contre les compteurs et moins précis pour les objectifs suivant des cours convergents. Il n'est pas applicable lorsque l'alimentation du navire par satellite tourne, car dans ce cas V0 \u003d 0 et avec tout point TPR M et M1 coïncident.
3. Méthode d'introduction des modifications à DZAD.
Comme le montre les calculs, lorsque le cours du navire d'observateur change, un angle allant jusqu'à 90 ° des erreurs dans le DZAD en raison de l'inertie de la rotation ne dépasse pas le rayon de circulation tactique. À grands angles, la rotation atteint le diamètre de la circulation. Dans cette méthode, Dzadnakovates une marge jusqu'à l'erreur maximale possible de la circulation inacceptable. Cette méthode est la principale lorsque vous tournez sous la poupe d'un navire potentiellement dangereux, qui est parallèle ou presque un cours parallèle.
Inertie comptable lors de la vitesse de manœuvre.
Les caractéristiques et les navires d'inertie conformes aux NSHS-82 sont soumis sous la forme d'une planification construite sur une échelle constante de distances et ayant une échelle de temps et de valeurs de vitesse. Lors de la résolution des tâches de ce chapitre, il est supposé que des informations sur les caractéristiques d'inertie-frein du navire avec un déplacement d'environ 10 000 tonnes (navire I) et un navire avec un déplacement d'environ 60 000 tonnes (navire II), donnée à l'annexe I .
Lorsque la vélocité est modifiée par le navire, l'emplacement relatif de la cible se déplacera le long d'une trajectoire curviligne, dont la courbure diminue progressivement car son navire est libéré à une nouvelle vitesse constante. Des erreurs de l'inacceptation de l'inertie lorsque la vitesse de manœuvre peut atteindre plusieurs kilomètres d'ici l'importance de la comptabilité de l'inertie. Lorsque la manœuvre, la vitesse sur le vaste cutané, la nouvelle vitesse du navire d'observateur est installée à travers des dizaines de minutes et tout ce temps la cible se déplace le long de la courbe LOD - de la complexité de la comptabilité de l'inertie.
La comptabilité d'inertie est possible de la manière suivante.
1. La méthode de construction d'une courbe exploratoire.
La trajectoire relatif du mouvement du navire peut être trouvée par la construction de triangles de voyage pour des intervalles de temps séquentiels T1, T2, ..., TN, après manœuvre (TI) \u003d SZ (TI) - SN (TI)
Construire une courbe d'aldoor (Fig. 6):
du point de vue de l'emplacement de Delhi à l'heure du début de la manœuvre de notre navire, de dépenser la cible du cours du cours et de noter les segments de l'informatique passables à travers certains intervalles de temps, par exemple toutes les trois minutes ( Points B1, B2, ..., BN); Des points de la BI à maintenir les lignes sur le côté, la voie inverse du navire d'observateur, et de reporter les segments couverts par le navire-observateur pendant le temps approprié après la manœuvre (points C1, C2, ..., CN ); À travers les points CI pour effectuer la courbe LOD et déterminer DKR comme la distance la plus courte du centre de la tablette à la courbe.

La raison est précise et visuelle, mais intensive de main-d'œuvre. Cette méthode ne résout que la tâche de prédire le DKR no à la manœuvre sélectionnée, mais le problème n'est pas résolu à la recherche de la vitesse requise de la vitesse pour les divergences dans une distance donnée. Pour résoudre des problèmes dans les conditions du pont ne s'applique pas. Utilisé dans une parselation d'accidents, ainsi que comme une référence pour estimer l'exactitude de l'inertie approximative.
2. La méthode d'introduction de modifications à DZAD.
Si, comme mesure de l'inertie du récipient, adoptez la caractéristique de télévision (la télévision caractéristique inertielle est numériquement égale à la vitesse de la moitié de la vitesse de la vitesse à ménévra stop..gif "largeur \u003d" 106 "hauteur \u003d" 24 src \u003d "\u003e . Gif "largeur \u003d" 67 "hauteur \u003d" 22 "\u003e. Gif" width \u003d "34" hauteur \u003d "22 src \u003d"\u003e ne dépasse pas 3 Ko. Dans ce cas, le DVAD peut être attribué à une réserve pour la Erreur maximale possible. Cette méthode peut être la principale pour les navires avec un déplacement à 1000 tonnes.
3. La méthode du point de prémisse conditionnel (Fig. 7)
Dans le même temps, une nouvelle vitesse de vitesse établie est reportée dans le triangle de vitesse du triangle de vitesse, mais l'Oloda est effectuée à partir de l'emplacement de point M1 de la cible à l'époque du début de la manœuvre et du préavis conditionné -mp point m, a évoqué le journal en avant pour l'heure prématurée du TPER. Dans la première approximation, la moitié du temps pour lequel la nouvelle vitesse de son navire est établie. Ainsi, avec la méthode de prise en compte de l'inertie, l'équipe de progression est donnée sur TUPR ~ 0,5 TMAN plus tôt que le navire est la cible du point à partir duquel l'ancien a été effectué. Avec le choix correct de progrès, les progrès auront lieu sur la trajectoire de signal d'écho.

Dans ce cas, la méthode de prise en compte de l'inertie est de croire conditionnellement que lors de la tPER, le récipient de navire précédent est maintenu (tandis que le chemin parcouru est surestimé) et après la nouvelle vitesse de VN1 est instantanément installée (en même temps le chemin passé). Comme on peut le voir de la Fig. 8, l'optimal sera optimale d'être un temps d'impact, dans lequel la surestimation du chemin parcouru au cours de la TEPR est compensée par un euphémisme ultérieur. Cela correspond à l'égalité des zones ombrées de la Fig. huit.

En figue. 9 fournit des informations sur le choix du temps d'exécution optimal en fonction de la manœuvre sélectionnée (VN1 / VN \u003d 0 - STOP, VN1 / VN \u003d 0,5 - MPH, etc.) et les caractéristiques de la télévision à inertie. Sur la base de ces informations au début du vol, une table de travail de l'heure prématurée peut être compilée.

Le navire a une télévision caractéristique inertie \u003d 4 et présente la gradation suivante des taux de PPH 14 UZ, SPK 10 UZ, MPH 8 UZ, SMPH 5 UZ. Faire une table de travail du temps d'exécution.
PPH - SPX. Vn1 / vn \u003d 10: 14 \u003d 0,71. Du graphique à la fig.9 TUPR / TV \u003d 0,8; TPR \u003d 0,8 * 4 \u003d 3,2 ~ 3 min. Ayant calculé de la même manière pour vn1 / vn \u003d 0,57; 0,3; 0, nous obtenons la manœuvre du taux de vitesse de la course totale.
SMPH, arrêtez-vous. |
|||
4. Mode méthode.
Dans ce cas, la méthode consistant à incorporer l'inertie dans le triangle de vitesse est reportée et non une nouvelle vitesse de navire et une vitesse moyenne (équivalente) au début de la manœuvre jusqu'à la convergence la plus courte  À travers les extrémités des vecteurs VCP et VC, le vecteur de la vitesse relative moyenne est effectué et que les oloodsr sont effectuées du point M (figure 10). En fait, le signal d'écho se déplacera le long de la courbe de ligne située entre le LOD et OLODSR convexe dans la direction de LOD, et au point de la convergence la plus courte des intersections d'olodsr.
À travers les extrémités des vecteurs VCP et VC, le vecteur de la vitesse relative moyenne est effectué et que les oloodsr sont effectuées du point M (figure 10). En fait, le signal d'écho se déplacera le long de la courbe de ligne située entre le LOD et OLODSR convexe dans la direction de LOD, et au point de la convergence la plus courte des intersections d'olodsr.

Dans la première approximation, la moyenne arithmétique moyenne entre anciens et nouvelles peut être acceptée comme une vitesse moyenne.
![]()
Avec un petit temps au plus court rapprochement (), l'erreur ne dépasse pas 10% de la libération du navire lors du freinage libre.
Plus précisément, la vitesse moyenne peut être trouvée à partir du tableau de comptabilité de l'inertie universelle indiquée à l'annexe 2. L'utilisation d'un tableau de comptabilité de l'inertie universelle envisage des exemples.
Trouvez la vitesse moyenne du navire I Pendant depuis le début de la manœuvre du PPC - MPH au rapprochement le plus court si TKR \u003d 20 minutes.
Depuis les graphiques des voies de freinage du navire I (Annexe 1) pour la vitesse de 16, nous trouvons la télévision \u003d 4 min. Dans la table universelle de l'inertie compte tenant compte de la colonne TV \u003d 4, nous trouvons le TKR le plus proche \u003d 22 min et dans la ligne appropriée pour l'inverse 0,5 VN, nous obtenons la VSR / Vn \u003d 0,6. La vitesse moyenne peut être reportée dans le triangle de la vitesse par l'œil de 0,6 segment vn ou, si nécessaire, traduire en nœuds VC \u003d 0,6 * 16 \u003d 9,6 uz.
Selon les résultats du joint radar, il a été obtenu que pour des divergences dans le but de DVAD, il est nécessaire d'avoir VSR ~ 0.5vn. OLOODSR et VO WED ont déterminé le temps depuis le début de la manœuvre à la convergence la plus courte de TKR ~ 20 min. Caractéristiques inertielles du navire TV \u003d 8 min. Quelle vitesse de manœuvre doit être prise pour diverger sur Dzad?
Dans la table universelle de l'inertie compte tenant compte de la colonne TV \u003d 8 min, nous trouvons TKR \u003d 19 min et dans la ligne appropriée recherchent la valeur de magnétoscope inférieure la plus proche. Dans ce cas, le magnétoscope \u003d 0,5vn est situé dans la colonne d'arrêt. Pour les divergences dans le but du Dzad, il est nécessaire de donner "stop". Dans la colonne adjacente, nous voyons que vt / vn \u003d 0,25, c'est-à-dire, en fait, au moment où la vitesse sera de 0,25 VN.
Annexe 1A.
Navire I Déplacement d'environ 10 000 tonnes.
https://pandia.ru/text/80/090/images/image033_47.gif "largeur \u003d" 423 "hauteur \u003d" 442 src \u003d "\u003e
Annexe 2.
Tablette maniable
des moyens pour une petite mécanisation pour la solution graphique de problèmes de manœuvre de ligne droite. Il est utilisé à la fois dans la manœuvre de combat (occupation de la position pour utiliser des armes, rapprochement en vue d'une distance donnée, d'une évasion de la réunion et d'une autre tâche) et des divergences avec les tribunaux de la mer.
- - 1) la carte de menzula, qui sert de table pour dessiner lors de la prise de vue; 2) une feuille de papier collée sur la menzulu, le plan de la zone amovible est appliqué à la TO-RY; 3) une feuille séparée de carte topographique ...
Dictionnaire de chemin de fer technique
- - un dispositif avec une surface plane spéciale et un dispositif indiquant les coordonnées de l'image pour leur entrée dans ...
Dictionnaire explicatif court sur l'impression
- - Français: régime maneuved Le mode de fonctionnement d'une centrale électrique avec une puissance variable pendant l'intervalle de temps défini Source: Termes et définitions dans l'industrie électrique ...
Dictionnaire de construction
- - Maneuble, Oh. Manœuvre f. 1. rel. manœuvrer; destiné à eux. Locomotive de vapeur maniable. BAS-1. 2. Diriger sans fortifications à long terme. Sur les opérations militaires. Warfare mobile. Défense maniable. Basse 1 ...
Dictionnaire historique du gallicalisme langue russe
- - Maswarm et ...
- - Et ...
Dictionnaire orphographique de la langue russe
- - -e. 1. Fabriqué avec l'utilisation de manœuvres, sans fortifications à long terme. Warfare mobile. 2. Causible pour changer rapidement la direction du mouvement. M. Cruiser. Tactique masculaire. | Sud Meniavrose, -i, épouses. ...
Dictionnaire explicatif d'Ozhegov
-
Dictionnaire explicatif Ushakov
- - Maneuble et gare, maniable, manœuvrable. Conduisant sans fortifications à long terme; fourmi. position. Warfare mobile ...
Dictionnaire explicatif Ushakov
- - Manœuvrable manuelle, manuel adj. 1. Fabriqué avec l'utilisation de manœuvres, sans fortifications à long terme. 2. Posséder la capacité de manœuvrer 1 ....
Dictionnaire explicatif efremova
- - Arr. 1. Fabriqué avec l'utilisation de manœuvres, sans fortifications à long terme. 2. Posséder la capacité de manœuvrer. // contribuant au changement rapide de la direction du mouvement. 3. constituent. Conçu pour les manœuvres ...
Dictionnaire explicatif efremova
- - aya, une. 1. Militaire. Menée avec l'utilisation large de manœuvres, sans fortifications à long terme; Antipaire. position. Warfare mobile ...
Petit dictionnaire académique
- -; bref Forme -en, -nna et mans "eurahored; bref ...
Dictionnaire orthographique russe
- -; Warfare mobile ...
Importance verbale russe
- - ...
Mots de forme
- - mobile, mobile; Tourner, haut, rafraîchissant ...
Dictionnaire de synonyme
"Comprimé maniable" dans des livres
Maneundable "Filin"
Du livre du génie "fokke-wulf". Great Kurt Tank Auteur Azheliovich Leonid LipmanovitchRéservoir de Kurt "Filin" maniable convaincu de donner son intelligence un nouveau nom: "Filin". Philin est dans la nature plus grande que les hiboux et des oiseaux de proie beaucoup plus terribles. Les balançoires de ses ailes dépassent un mètre et demi. Les filins volent complètement silencieusement, et surtout, possèdent unique unique
Tablette Jaune Skin
Du livre "Ne pleure pas à propos de nous ..." Auteur Kachaev Yuri GrigorievichTablette en cuir jaune rentré chez elle, Nina Elistratov a découvert que Yuri, avec Murat et Leva Akimov, sont allé à la ville. Le fils a laissé une note sur la table, elle a manqué de mots: «De la chasse arrivera tard. Ne vous inquiétez pas ». Comme disent, ne vous inquiétez pas quand huit bientôt, et avec
Département de salle de bain: comprimé dans les nuages
Du livre de l'ordinateur PDA N138 (01.10.2011-07.10.2011) Auteur Composition "Computererra"Département de la baignoire: Tablette in Clouds Auteur: Baths Mikhailopublihed Octobre 05, 2011. À la fin de septembre 2011, Amazon a présenté à tous les fabricants de comprimés une bonne pilule, ou plus précisément, une tablette. (Comment voudriez-vous traduire la tablette Word Aglitskoe?) Dans le rôle
Ordinateur et tablette
Du livre sept compétences des parents effectifs: gestion de la famille, ou comment gérer tout. Livre de formation par Heinz MariaVous pensez que l'ordinateur et la tablette, vous comprenez que les ordinateurs et les tablettes sont entrés dans nos vies au sérieux et pendant longtemps. Vous n'avez pas besoin d'être un prunérateur pour remarquer les tendances du remplacement des anciennes technologies de papier interactives. S'opposer à cette tendance - je ne me soucie pas de quoi résister
Béplane manœuvrable à grande vitesse - champ de bataille d'avion
Du livre de l'avion Storm de l'armée rouge. Volume 1. Formation de l'apparence Auteur Perov Vladimir IlyichBéplane manioteur à grande vitesse - Un avion de Battlefield en parallèle Travaillant sur la modification des avions de renseignement en série dans les avions d'attaque légers et la création d'un "aéronef militaire" parmi une partie des spécialistes de l'armée de l'armée rouge a reçu l'étendue de la théorie des attaques
Tablette du colonel
Du livre de l'auteurLa tablette du colonel devant nous est des révélations publiques et poétiques - Analytics opérationnels et croquis avec «Nature» ... Nous avons besoin de leur compréhension de notre passé avec l'expérience d'aujourd'hui. Se souvenir de vous avec jeune. Et plus loin. Ils sont intéressés par le destin de l'auteur - militaire
La tablette
Du livre Big Soviet Encyclopédie (PL) Auteur BSE.IFA 2010: Une fois tablette, deux tablettes Andrey écrit
Du livre Digital Magazine "ComputerRer" Number 33 Auteur Composition "Computererra"IFA 2010: Une fois que tablette, deux tablettes Andrei écrites Posteri écrivant des ordinateurs de tablette ont présenté longtemps avant que Apple iPad, mais avec son apparition dans leur monde, tout a fortement changé. Maintenant devant les développeurs, il semble que c'est sorti que la tablette n'est pas
Choisissez une tablette moderne
Du livre de l'ordinateur PDA N148 (12/03 / 2011-09.12.2011) Auteur Composition "Computererra"Nous choisissons une tablette moderne Publiée par: Oleg Nechazublihed December 06, 2011 L'apparition du marché des tablettes iPad a été rencontrée par le public avec plaisir, beaucoup surprenant tous les autres fabricants d'ordinateurs portables. Le fait est que les comprimés tactiles en série
Département de la baignoire: tablette et bureau
Du livre de l'ordinateur PDA N137 (09/24 / 2011-30.09.2011) Auteur Composition "Computererra"Département de la baignoire: Tablette et bureau Auteur: Baths Michaelopublie le 27 septembre 2011 Été en principe, principalement en Amérique du Nord, il y avait encore de nombreuses prévisions pour la tombe de l'ordinateur personnel classique desktop. Lever K.
Du livre de l'auteurPériode de guerre maniable - Opérations en Allemand-Autrichien Front: Galice Battle et East Prussien Opération
Du livre de l'auteurPériode de guerre maniable - Opérations en Allemand-Autrichien Front: Galice Battle et East Prussien Opération
Du livre de l'auteurPériode de guerre maniable - Opérations en Allemand-Autrichien Front: Galice Battle et East Prussien Opération Avant le premier voyage dans l'est de la Prusse, le Grand Prince Nikolai Nikolayevich a déclaré être prêt à commencer à se déplacer sur Berlin à quatre armées: les deux premiers
Période de guerre maniable - Opérations en Allemand-Autrichien Front: Galice Battle et East Prussien Opération
Du livre de l'auteurModèle "comprimé"
Du livre un cadeau de livre, une reine de beauté décente Auteur Kriksunova Inna AbramovnaLe modèle de tablette est un sac rigide sous la forme d'un rectangle étiré verticalement. Le sac de la tablette a une vanne volante, complètement ou partiellement accrochée du sac, au bas de cette vanne est la serrure de la fixation. Ce sac de modèle est porté sur un long
 Les dispositifs d'éclairage basés sur des LED de courant alternatif trouvent leur créneau et peuvent sortir au-delà de ses limites.
Les dispositifs d'éclairage basés sur des LED de courant alternatif trouvent leur créneau et peuvent sortir au-delà de ses limites.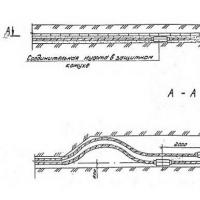 Exigences et tarifs pour la pose de câble dans la portée de l'application, définitions
Exigences et tarifs pour la pose de câble dans la portée de l'application, définitions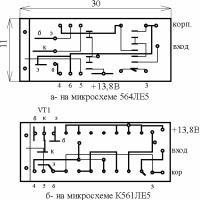 Stroboscope automobile du pointeur laser
Stroboscope automobile du pointeur laser Commandez 20 UAH au compte. Comment emprunter sur MTS. Informations supplémentaires sur le service
Commandez 20 UAH au compte. Comment emprunter sur MTS. Informations supplémentaires sur le service Comment vérifier la réapprovisionnement du compte
Comment vérifier la réapprovisionnement du compte Comment obtenir un prêt sur Tele2?
Comment obtenir un prêt sur Tele2? Réactivité SSD sur une planche miniature Quelle lecteur SSD achète
Réactivité SSD sur une planche miniature Quelle lecteur SSD achète