What does CAD technical support include? Computer-aided design systems (CAD). Hardware and software
CAD support has several types: mathematical, software, information, technical, linguistic, methodological, organizational.
1. Software (MO) includes the algorithms by which software is developed; functional models of designed objects; methods for numerical problem solving; methods for searching for extremum. MO CAD is divided into:
Mathematical methods and construction on their basis of mathematical models of design objects;
Formalized description of computer-aided design technology.
ML must describe the interrelationship of the object, process and design automation tools.
2. Software (BY)– this is a set of all programs and operational documentation for them necessary to perform computer-aided design. Software is divided into general system and special (application) software.
System-wide software created to organize the functioning of technical means, i.e. planning and managing the computing process, distributing available resources. System-wide software is similar in purpose to operating systems.
Special software implements software for direct implementation of design procedures.
Special software, or application software, has the form of software.
Software levels: machine code, Assembly language, high-level languages (Fig. 1.1).
3. CAD information support(IO) is the data that the designer uses during the design process to develop a design solution. This is reference data on components, standard design solutions, parameters of elements, information on the state of current developments in the form of intermediate and final design solutions, structures and parameters of designed objects. The totality of data used in CAD forms an information fund. The main function of the IO is maintaining the fund, updating, saving and organizing access to data.
Rice. 1.1. Hierarchical software structure
The composition of the CAD IO includes:
Software modules;
Initial and resulting data for program modules;
Regulatory and reference design documentation, state and industry standards, guidance materials and instructions, standard design solutions, current design documentation reflecting the progress and status of the project.
There are the following methods of maintaining CAD IR:
Using the file system;
Building libraries;
Using the database;
Creation of adapter information programs.
The use of a file system and the construction of libraries is widespread, as it is supported by operating system tools. These methods are used when storing program modules, dialog scenarios to support the design process, entering large-scale source data, and storing text documents. However, they are of little use for operational processing of reference data.
The linguistic means of a database management system are changing from programming languages to user-specific languages.
Main functions of the DBMS:
Creating a database schema;
Organization of data storage;
Database integrity protection;
Maintaining database loading;
Providing users with access to the database.
Creation of adapter information programs - for organizing an intermodular interface. In CAD systems, whose programs operate with a large number of data (input, intermediate, result), it is convenient to organize exchange areas in the form of some kind of data bank. This allows some of the functions performed by the adapter to be assigned to the DBMS, which ultimately reduces the time for developing information and software. The adapter performs a set of operations to organize information interaction between software modules.
4. CAD technical support. Traditional design takes up 15% of computing operations. CAD requires specialized tools, mainly an automated workstation (AWS). AWS– for solving complex design problems in an offline mode (for three- and two-dimensional representation of design objects), invariant to various types of design objects and for solving standard engineering, design and technological problems.
5. Linguistic CAD support , which is based on special language tools (design languages) intended to describe computer-aided design procedures and design solutions. Problem-oriented languages are Fortran, C, etc. To solve geometric problems of the engineering type, PFLs combine algorithmic language tools for solving mathematical problems and special language tools for modeling geometric objects. POYs are created for relevant areas of application (construction, electronics, etc.). But the excessive variety of languages makes it difficult to share CAD tools between enterprises. The development of flexible production systems requires careful consideration of issues regarding the composition of linguistic support.
6. Methodological support CAD– these are the documents included in its composition that regulate the operating procedure of the system and are in the nature of instructions.
7. Organizational support for CAD– regulations, orders, staffing, qualification requirements regulating the organizational structure of departments with a set of computer-aided design tools.
CAD technical support
From the point of view of the CAD system model, hardware represents the lowest level into which operating software and other types of CAD software are “immersed” and implemented.
The problem of designing hardware, therefore, can be formulated as the problem of optimal selection of the composition of CAD hardware. The initial information in this case is the results of the analysis of internal design tasks and resource requirements for technical means in the form of criteria and restrictions.
The basic requirements for CAD technical tools are as follows:
· efficiency;
· versatility;
· compatibility;
· reliability.
Technical means ( TS) in CAD they solve problems:
· input of initial data for the description of the design object;
· displaying the entered information for the purpose of its control and editing;
· transformation of information (changes in the form and structure of data presentation, recoding, etc.);
· information storage;
· displaying final and intermediate results of the solution;
· prompt communication between the designer and the system in the process of solving problems.
To solve these problems, vehicles must contain:
· processors,
· RAM,
· external storage devices,
· information input/output devices,
· technical means of computer graphics,
· devices for operational communication between a person and a computer,
· devices that provide communication between computers and remote terminals and other machines.
If it is necessary to create a direct connection between CAD and production equipment, the TS must include devices that convert design results into machine control signals.
CAD systems can be single- or multi-level.
Vehicles that include one computer equipped with a wide range of peripheral equipment are called single-level. They are widely used in the design of products for general industrial use with an established design, having highly specialized mathematical models and a fixed sequence of stages of design and technological work.
The development of CAD involves expanding the set of terminal devices, providing each designer with the ability to interact with a computer, and processing technical information directly at the workplace. For this purpose, terminal devices are equipped with mini- and microcomputers that have special software and intelligent terminals. They are connected to high-performance computers using special or regular telephone channels.
To use information from individual computers distributed over a relatively large area, the use of computer networks gives a special effect.
The distinctive features of a computer network are as follows:
· a large number of computers interacting with each other, performing the functions of collecting, storing, transmitting, processing and issuing information;
· extremely high computing power;
· distributed information processing;
· reliable and flexible connection between the user and computing power;
· the possibility of mutual exchange of information between computers;
· expansion to any capacity and length.
Lecture 3. CAD MATHEMATICS
General provisions
Mathematical software (MS) combines mathematical models of designed objects, methods and algorithms for performing design procedures, used in computer-aided design.
Since the early 80s of the 20th century, in connection with the mass production and implementation of personal computers (PCs), the idea of system automation of the design process has become practically feasible for design organizations of any scale: from a large institute to a private office. The concept of CAD, on the one hand, has become simplified and is often associated with one or another computer program. On the other hand, the design of complex technical objects is possible only within the framework of CAD as an organizational and technical system, which is based on the full potential of information technology.
CAD support tools are classified as the unity of the following components: technical, software, mathematical, methodological, information and organizational.
2.1. Hardware and software
Technical support- this is a set of technical means with the help of which they collect, process, store, transform and transmit data related to the design object.
The basis of technical support is computer technology and, first of all, a personal computer.
The standard computer configuration is well known (see Fig. 2.1):
· a system unit consisting of a processor, RAM, power supply, hard drive, other data storage devices, ports for connecting peripheral devices;
· keyboard for entering information;
· monitor for displaying information;
· mouse for ease of human-computer dialogue.
Rice. 2.1. Standard configuration personal computer
The concept of peripheral devices includes a wide range of technical means. First of all, these are tools for collecting and processing data for design. These include electronic geodetic equipment (tacheometers, satellite navigation systems, laser scanners, etc.), which either operate directly under computer control or transmit measurement data in the form of computer files. More detailed information about the technical means of engineering surveys is presented in Chapter. 4.
If the initial information about the designed road is presented in the form of topographic plan tablets, then to convert information from paper to electronic form, use scanners(see Fig. 2.2, a) . Scanners are either roll or flatbed. The scanning accuracy of the latter is significantly higher and can reach 12,000 dpi (dots per inch). When it comes to designing complex technical objects, large format engineering scanners A 0 (A 1) are used.
The output graphic information about the design object (drawings) is also printed on large format plotters. By paper feeding method plotters like scanners, there are roll (Fig. 2.2, b) or flatbed. According to the method of applying the dye - laser or inkjet. The question of what an engineering drawing should be, black and white or color, has recently been clearly decided in favor of color. Firstly, in view of significant progress in the field of color printing, which has become slightly more expensive than black and white. Secondly, color carries additional information about the designed object and helps to increase the efficiency of visual analysis of such drawings.
SHAPE\* MERGEFORMAT
Rice. 2.2. a) Roll scanner; b) Plotterroll
Computer peripheral devices also include digital photo and video devices, which are currently widely used in collecting initial data for road design.
To organize collective work on a project and prompt exchange of information, computers are combined into local (Intranet) and global (Internet) networks, the technical components of which are servers, network cards, modems, fiber-optic networks, etc.
Software CAD is divided into system-wide And applied.
General system software includes, first of all, operating systems (OS), which manage all processes occurring in computers. The emergence and evolution of the OS occurred in parallel with the development of the computers themselves. If the creation of the first personal computer is associated with the company IBM(www. ibm. com ), then the first mass-produced OS appeared for this computer from the company Microsoft( www. microsoft. com) and was called MS- DOS.
14-year path of evolution (from 1981 to 1995) MS- DOS versions 1.0-7.0 contributed to the introduction of computers from solving narrow engineering problems to their widespread use in all spheres of life.
Since the early 90s, replaced MS- DOS comes Windows(from English - windows) also from the company Microsoft, which allows you to simultaneously work with several programs (windows), easily switching between them without having to close and restart individual programs. At the initial stage of development Windows served as a graphical interface for MS- DOS.
With the exit Windows 3.1 (1992) this operating system is associated as independent, capable of working with RAM of more than 640 kB, with scalable fonts TrueType.
Released in 1993 WindowsNT(short for New Technology - new technology) was well received by developers due to its increased security, stability and advanced API-interface Win32 , which makes it easier to write powerful programs.
Published in 1995 Windows95 – the most user-friendly version Windows, for the installation of which you do not need to first install DOS; its appearance makes PCs more accessible to the mass consumer. Windows 95 has a built-in set of protocols TCP/ IP and long file names are allowed.
Windows 98 (1998) - latest version Windows based on the old core operating on the foundation DOS. System Windows 98 integrated with browser InternetExplorer 4 and is compatible with numerous new hardware standards, including USB ports. Subsequent versions of Windows were developed based on the NT kernel.
Currently (since 2001), most application programs, including CAD, operate under the control of an operating system MSWindowsXP(from the English eXPerience - experience).
New problem-oriented interface MSWindowsXP allows you to quickly master the principles of working with the operating system, even for those users who have never encountered systems of the family before Windows. Used in WindowsXP advanced web technologies open up the possibility of exchanging text and voice messages, creating web projects of varying levels of complexity and sharing applications not only on a local network, but also on the Internet.
Conditionally system-wide software includes: MSOffice, a number of applications of which (text editor Word, spreadsheets Excel) have become de facto standards in their class of programs. Almost all CAD systems that generate text documents as output data do this in the environment MSWord, and tabular forms - in the environment MSExcel.
Application programs, in addition to the CAD systems themselves, include: vectorizers; programs for processing geodetic data, remote sensing data; database management systems (DBMS); design documentation management systems (DMS), etc.
The last of these (SUPKD) are extremely important in the work of design organizations, since they largely ensure the functioning of quality control systems in the production of design products.
Of the many programs in this class, the most fully functional system is PartyPLUS(developer – Lotsia Soft company, Moscow, www. lotsia. com ).
PartyPLUS is a professional system built in a client-server architecture based on a DBMS type Oracle, MSSQL- Server, Sybase and characterized by reliability, performance, scalability and security.
Rice. 2.3. Party PLUS Document Management System
The system contains a secure archive of documents, as well as built-in tools for free and predefined routing of documents, work and business process management. The system supports the mode of parallel collective work of various user groups and ensures the management of all project-related information, which allows employees of the design organization not only to access the project description, but also to manage information about this project.
If the enterprise has several geographically distributed design departments, then with the help PartyPLUS You can organize smooth interaction between remote departments when working on several projects.
PartyPLUS has the function of maintaining a history of all engineering changes in the project structure, the ability to compare the current state with the state at any date. There are tools to support multi-variant design with storage of options that are not included in the main project, and tools to support working with document versions. It is possible to set analogs or related elements for a project element, and group elements according to various criteria.
System PartyPLUS universal, maximally flexible for solving problems in various branches of engineering, including the road industry, and focused on equal work with various CAD systems.
2.2. Mathematical and methodological support
Software is a set of analytical and numerical methods, mathematical models and algorithms for performing design procedures. The use of certain methods depends on the level of development of CAD, the properties of design objects and the nature of the problems being solved.
At the initial stage of CAD development, manual design methods were algorithmized. This helped reduce design time, but the quality of design solutions practically did not improve.
The first work in the field of optimization of design solutions began in the 70s and was associated primarily with the design of a longitudinal profile. The works of E.L. Filshtein and his method of “boundary iterations”, V.I. Struchenkov and his method of “gradient projection” established the position of the design line of the longitudinal profile, taking into account the minimization of the volume of excavation work. Already at this stage, we had to abandon the representation of the design line as a sequence of straight lines and circular arcs, and switch to a model of the design line in the form of a broken line (linear spline). However, these methods did not affect the general (basic) principles of research and design of highways.
The transition in the 90s to system automation of road design based on digital terrain models led to a significant change in the entire technology of design and survey work.
During the period of “manual” road design, geodetic surveys were carried out using the “picket” method. The essence of this method lies in the following stages of work:
· Field tracing of a highway. At the same time, the tangential course of the route is also the main course for all subsequent marking work, both at the survey stage and at the construction stage.
· Planned and high-altitude fastening of the route with near-route benchmarks and corner posts.
· Picketing along the route. Not only picket points are broken down and secured, but also plus (characteristic) points associated with relief breaks, intersections of water flows, utilities and roads.
· Double longitudinal geometric leveling of the route according to the accepted picketage.
· Shooting cross-sections. When setting up a picket along the route, cross-sections are simultaneously laid out at all picket and plus points. On straight sections of the route, the cross-sections are divided perpendicular to the axis of the road, and on curved sections - perpendicular to the tangent to the route. The length of the diameter is taken such that the subgrade with all its structural elements is located within its limits.
Surveying of cross-sections is carried out to construct longitudinal and transverse profiles along the accepted route for the subsequent design of the roadbed, organization of a surface drainage system, calculation of the volume of excavation work and preparation of design documentation.
As follows from the above, with the “picket” survey method, changing the position of the route and, consequently, all other projections at the design stage is not possible. Thus, the creativity of design activities with this method is limited due to the predetermined position of the road route, which significantly affects the quality of the final design solutions. Let us also note that in field tracing conditions, in the absence of computer equipment, the survey engineer was limited to an elementary route rounding scheme of the “clothoid-circular curve-clothoid” type, the breakdown of which could be done using the appropriate breakdown tables.
A completely different perspective is opened by the “picketless” road survey method, the priority application of which became possible thanks to the achievements of electronic tacheometry and computer technology.
Research using this method consists of the following:
· In the range of possible design solutions determined at the pre-design stage, a main passage (network of passages) is laid and secured.
· A tacheometric survey of the variation band is carried out. At the same time, high productivity of work is ensured, since all measurements necessary to determine the spatial coordinates of survey points in the area are performed comprehensively using one geodetic instrument - a tacheometer.
· A digital terrain model is read from an electronic total station into a computer, which is the basis for all subsequent design procedures.
Note that with the “no picket” survey method, the location of the route is determined not at the survey stage, but at the design stage (in office conditions). This makes it possible to vary the location of the route at almost any stage of design, to use the most modern mathematical methods, including optimization, to establish the location of the route and its description.
Considering the three-dimensional nature of the DTM and the surfaces it generates, a unique opportunity arises for spatial tracing of roads. Currently, the methodology and algorithms for spatial tracing are being successfully developed within the framework of CAD and should soon join the arsenal of advanced technologies for road design practice.
Of the many methods of computational mathematics that have become available in the context of system automation of design work, we will focus on splines and Bezier curves, used in the automated tracing of roads in plan and longitudinal profile.
Interpolation splines. As you know, the term "spline" comes from the name of a drawing tool - a thin metal or wooden ruler that bends so as to pass through given points ( x i, y i= f(x i)).
Then the spline at equilibrium takes a form that minimizes its potential energy. And in the theory of beams it has been established that this energy is proportional to the integral over the arc length of the square of the spline curvature:
under conditions S(x i) = y i.
Rice. 2.4. Outlines of a spline as a mathematical analogue of a ruler
Splines can be defined in 2 ways: based on the mutual agreement of simple functions and from solving the minimization problem.
Splines determined by the first method include interpolation splines, which are necessary for the analytical representation of discretely specified information.
Smoothing splines are most often determined based on the 2nd method. It is smoothing splines that should find the widest application for optimizing those design solutions that, at the initial stage of consideration, are, as a rule, approximate in nature.
In design practice, as a rule, splines of the 1st and 3rd degrees are used. Splines of the 1st degree (linear) serve, firstly, as a good and accessible illustration for understanding the processes of constructing spline algorithms, and secondly, they are sufficient to describe the geometric elements of roads represented in the form of broken lines (main and tangential passages, longitudinal and transverse ground profiles, etc.).
Splines of the 1st degree. Splines of the 1st degree (broken) are quite simple to understand and, at the same time, reflect the basic properties of spline functions. From a mathematical point of view, a 1st degree spline is a piecewise continuous function, described on each segment by an equation of the form:
y= a i+ b i x, (2.2)
Where i– number of the considered interval between interpolation nodesx i And x i + 1 .
As can be seen from formula (2.2), on an elementary interval the form of the equation does not differ from the generally accepted expression for a straight line. In general, the equation of a broken line (1st degree spline) in matrix form can be written as:
(2.3)
This system of linear equations does not require a joint solution and breaks down into solutions to each equation separately. A spline, the solution of which involves the calculation of small-dimensional subsystems, in this case first-order equations, will be called local.
An interpolation spline of the 1st degree is a broken line passing through the points (x i , y i). For the aggregate x i(i = 0, 1,… ,n) in the interval [ a, b] in this case the condition must be met x i 1 .
Using the Lagrange polynomial, you can construct a spline for the interval i –(i+ 1):
(2.4)
Designation S 1 (x) we will understand it as a spline function of the first degree. Otherwise, equation (2.4) can be written:
(2.5)
If we accept o, the form of equations (2.2) and (2.5) coincides. To build an algorithm and create a procedure for constructing and calculating a spline, you need to remember only 2 n+2 numbers.
Splines of the 3rd degree. Splines of the 3rd degree (cubic) are a piecewise continuous (continuity of the 1st and 2nd derivatives) function consisting of segments of cubic parabolas.
Currently, there are many algorithms for constructing and calculating cubic splines on a computer, which is due to their widespread use in solving technical problems related to the interpolation of curves and surfaces.
When solving the problem, between n nodes there are n–1 fragments of cubic curves, and the cubic curve, in turn, is determined by 4 parameters. Since the value of the function and the 1st, 2nd derivatives ( X s, X¢ s, X² s) are continuous in all ( n–2)- internal nodes, then we have 3( n–2) conditions. In nodes Xsi= X i n more conditions are imposed on X s. From here we get 4 n–6 conditions. To unambiguously define a spline, two more conditions are necessary, which are usually associated with the so-called boundary conditions. For example, it is often accepted simply. In this case, we obtain the required number of conditions to determine the natural spline in the form:
The disadvantage of this spline is that it does not have the ability to change the shape in the area between two rigidly fixed interpolation points. Only by moving one of the interpolation points can you achieve some change in the shape of the spline curve. Moreover, due to the fact that the cubic interpolation spline refers to non-local approximation methods, its values at points that do not coincide with the grid nodes Δ: a= x 0 x N = b, depend on the entire set of quantities f i = f(x i), i= 0, 1 ,…, N, and also on the values of the boundary conditions at the points a, b; therefore, the desired effect of changing the shape of the spline curve in one place of the interpolation interval may be overlapped by undesirable changes throughout the rest of the interval.
However, methods to combat this unpleasant phenomenon are known. This is, firstly, the use of local interpolations of the Hermitian type, for which the value of the spline on the interval between the grid nodes depends on the values of the function and its derivatives only from a certain neighborhood of this interval.
Secondly, interpolation based on rational splines. While retaining one of the most important properties of cubic spline interpolation - simplicity and efficiency of computer implementation - rational splines have the ability to approximate functions with large gradients or break points, while eliminating the oscillations inherent in a conventional cubic spline.
A rational spline function is a function S(x), which at each interpolation interval [ x i, x i+1 ] is written as
(2.7)
Where t =(x-x i)/h i , h i = xi+ 1 - xi,p i ,q i– given numbers, -1 p i ,q i and at the same time continuous along with its first and second derivatives.
From expression (2.7) it is clear that when p i = q i = 0, i = 0, 1,…, N–1, the rational spline becomes a regular cubic spline. In addition, we can assume that a first degree spline is also a special case of a cubic spline, since for all p i , q i –>∞,i = 0, 1,…, N–1, fair S(x)–> f i(1– t)+ f i +1 t,xÎ [xi,x i +1 ].
Thus, it can be expected that when rational splines are used by appropriate choice of free parameters p i , q i high approximation accuracy is achieved in areas of sufficient smoothness of the interpolated function, and in areas with large gradients, the qualitative requirements - convexity and monotonicity - are satisfied.
The use of a rational spline function makes it possible to describe a route with a uniform dependence with maximum approximation to the route specified by traditional elements. Varying the values of the coefficients p i And qi, It is possible to fully simulate traditional route plan elements (straight line, circular curve, clothoid) using the spline function.
The “weak” point in the justification of interpolation splines as a universal mathematical apparatus for routing highways is the assumption (condition) that the interpolation nodes are assigned correctly by the designer and are not subject to adjustment when calculating the values of the spline itself.
Let's analyze how node locations are assigned in practice?
If the routing is carried out on the basis of a map or topographic plan, then a sketch line of the road is drawn, which, in the opinion of the designer, is the most appropriate under the given conditions, “by hand” or with the help of mechanical devices. Next, interpolation nodes are fixed on the sketch line and their coordinates are measured. At the same time, there are no strictly formalized algorithms for assigning node locations; there are only a number of practical tips. In particular: frequent arrangement of nodes leads to oscillation of the curvature of such a spline due to the inevitable error in capturing the coordinates of interpolation nodes; their rare location causes significant deviations of the spline route from the sketch line generating it.
If the tracing is carried out based on field survey materials, then the spline interpolation nodes, in this case, are the survey points of the digital terrain model and the error in establishing their coordinates is even more obvious due to the presence of random and systematic errors.
A good approximation of the spline route to the sketch version and, at the same time, its sufficient smoothness (smoothness) can be achieved, as a rule, only with repeated intuitive adjustments of the interpolation nodes by the designer.
It follows that interpolation splines are not a mathematical tool for optimal routing, but only a convenient and, in many tasks, extremely effective toolkit for computer processing of sketched design solutions. The quality of such solutions significantly depends on the qualifications of the designer.
From the above considerations it follows that the formulation of the tracing problem based on splines should assume the following: interpolation nodes of the sketch route, and in the case of reconstruction - the original route, are assigned approximately (with a tolerance) and their exact location is calculated according to certain patterns, taking into account a number of fundamental target settings of the tracing process. In mathematical terminology, this problem can be classified as problems of generating geometric shapes from their rough (approximate) descriptions or smoothing problems.
Smoothing splines. As a mathematical tool for solving the problem of road tracing, smoothing splines are used, which minimize the functional of the form:
with restrictions, for example
In the functional record q = 1, 2; S(x i) – spline; r i– weight coefficient of the interpolation node; f 0 (x i) is the initial approximation function.
Restrictions can be very different and in the case of road routing these are: restrictions on the permissible radius, the direction of the route in plan and the slope in the longitudinal profile, etc. In this case, for third-degree splines, so-called “boundary conditions” must be added at points x 0 = a,x n =b, ensuring the uniqueness of the spline construction. For example, these may be the conditions for a given initial and final direction of the designed section of the route S¢ (xa), S¢ (x b).
From the form of writing the joint conditions (2.8) – (2.10) it follows that this is a conditional optimization problem.
Condition (2.9) allows you to shift the interpolation nodes in the established variation corridor according to a given algorithm. A sign of completion of the iterative optimization process is the fulfillment of condition (2.10) and means that at each further iterative step the shift of any of the nodes will not exceed the value d.
If in condition (2.9) ei= 0, then we again come to the concept of interpolation splines. From this it becomes obvious that interpolation splines are just a special case of smoothing splines.
The choice of smoothing splines for further detailed consideration only in the form of algebraic polynomials and only 1st and 3rd degrees from the entire variety is due to the fact that these are the simplest splines in computer implementation and, at the same time, have sufficient approximation properties for describing outlines route and its differential analysis. In the case of 1st degree splines, this analysis (1st and 2nd derivatives) can be performed in the form of divided differences, and for 3rd degree splines, by direct differentiation of the function.
Functional (2.8) well models the problem of road routing during their reconstruction, which is to achieve a minimum deviation of the designed route from the existing one, subject to simultaneous conditions for the slope and curvature in the longitudinal profile, and for the curvature and rate of increase of curvature in the plan according to the requirements of SNiP for this category of road. The minimum deviation is achieved due to the second term, and the conditions for curvature and slope - the first term of the functional (2.8).
When simultaneously minimizing two terms, the relationship between them is regulated by weighting coefficients r i , which must be normalized in a certain way.
Let us consider the optimization capabilities of functional (2.8) in order of increasing complexity.
The second term of the functional
is known as the method of least squares, and it represents the function n+1st variable S(x i), i = 0, 1,…, n. Minimization of the latter breaks down in this case into the minimization of individual terms independently for each variable.
In the case of using splines of the 1st degree, the first term of the functional (2.8) will be written as
.(2.12)
Let us consider the linear approximation of the functional of the arc length of a curve
(here it is assumed that | S`(x)| few). It is obvious that the solution to the problem of minimizing the functional (2.13) coincides with the solution to the linearized problem of finding an element of minimum length. The resulting solution is often called a spline in a convex set.
After substituting the first derivative of the spline, which in this case coincides with the divided difference, will take the form
(2.14)
Where h i= x i +1 –x i.
Let's differentiate with respect to the variable S(x i) and add two consecutive terms of the equation containing this unknown:
Equating the resulting amount to zero and expressing the unknown S(x i), we get
Here the "=" sign represents the assignment operator. If we take the interpolation step uniform, that is h i =const, then the optimization process (step-by-step iterations) in a graphical interpretation will be quite clear (Fig. 3. 10).
The rapid convergence of the iterative process allows us to recommend this method for the preliminary development of design solutions along the design line of the longitudinal profile. In this case, the radius of curvature and the slope of the design line can be controlled by plotting the first and second divided differences.
Rice. 2.5. Graphical interpretation of linear spline smoothing
Joint consideration of the sum of functionals (2.12) and (2.14) gives us a recurrent formula for optimization:
The convergence of the iterative process here, in comparison with formula (2.17), is lower and significantly depends on the quantity r i. Weight coefficient r i allows you to slow down or speed up the iteration process at individual points (nodes) and can, for example, for a project line, serve as a means of accounting for the volume or cost of constructing a roadbed (road work) on a section of unit length.
Let us consider the first term of the functional (2.8) as applied to cubic splines:
Similarly, the solution to the spline problem in a convex set describes (in a linearized formulation) the position occupied by an elastic lath in the constraint corridor. When replacing the second derivative with the second divided difference, this functional takes the form:
Where S¢ (xa), S¢ (x b) are one of the possible boundary conditions for a cubic spline. In relation to the design line, this is the slope at the initial ( xa) and final ( x b) points of the designed road section.
Differentiation and summation of the equations will give us the corresponding recurrent formulas, which are given in detail in the specialized literature.
Designing road curves in plan according to the classic “clothoid – circular curve – clothoid” scheme is quite reasonable from a theoretical point of view, but in practice such a scheme has many flaws and inconveniences. Without going into their essence, we note that if we apply any function that could, to some extent, simulate the classical scheme (composite curve), then from the standpoint of convenience of algorithmization and organization of the “engineer-computer” dialogue, this would be sufficient effective.
Bezier curves. In 1970 Pierre Bézier (French mathematician) selected the components of the parametric cubic polynomial in such a way that their physical meaning became very clear and very suitable for solving many applied problems, including for the purpose of designing roads using the “tangential routing” principle.
Bezier formula for cubic polynomial ( n= 3) has the following form.
Let r i = , i= 0, 1, 2, 3, then for 0 ≤ t ≤ 1:
or in matrix form:
Matrix M is called the basis matrix of a cubic Bezier curve.
A curve represented in Bezier form passes through the points r 0 and r 3, has a tangent at the point r 0 directed from r 0 k r 1, and the tangent at the point r 3, directed from r 2 k r 3 .
Direct R 0 R 1 , R 1 R 2 and R 2 R 3 form a figure called the characteristic (defining) broken line, which predetermines the outline of the Bezier curve (Fig. 2.6).
To construct a curve, set the points R 0 and R 3 through which the curve should pass, then on the desired tangents to this curve at the points R 0 and R 3 set points R 1 and R 2. Changing the lengths of segments R 0 R 1 and R 2 R 3 vary the outline of the curve, giving it the desired shape.
Rice. 2.6. Cubic Bezier curve segment
The main controlled quantity when designing plan curves is the radius of curvature. In order to calculate the radius of curvature at each point of the curve, it is necessary to know the values of the first and second derivatives of the radius vector of the point. For a cubic Bezier curve, the first and second derivatives are calculated using the formulas below:
Then the curvature (the reciprocal of the radius of curvature) is calculated using the formula:
In addition to the 3rd order (cubic) Bezier curve, it is also possible to use 2nd, 4th and 5th order Bezier curves for road tracing purposes. The corresponding formulas for calculating the radius vectors (and their derivatives) for these curves are given below.
2nd order Bezier curve:
4th order Bezier curve:
5th order Bezier curve:
By combining elementary Bezier curves γ (1) , γ (2) ,…, γ ( l) , whose end point of the curve is γ ( i) , i= 1, 2,…, l – 1, coincides with the starting point of the curve γ ( i+1) , a compound Bezier curve is obtained. If each curve γ ( i) is given by a parametric equation of the form
r = r (i) (t), 0 ≤ t≤ 1,
then this condition is written as follows:
r (i) (1) = r (i +1) (0), i= 1, 2,…, l–1.
In particular, in order for the tangent of a compound Bezier curve defined by a set of points P 0 , P 1 , …, P m , changed continuously along this curve, it is necessary that the triples of vertices P 3 i -1 , P 3 i, P 3 i +1 (i≥ 1) were collinear, that is, they lay on the same straight line (see Fig. 2.7).
Rice. 2.7. Compound Cubic Bezier Curve
Spatial Bezier curves. Above, in the discussion about Bezier curves, the flat arrangement of the control points of the route was understood and, accordingly, the representation of only plane curves was considered. In general, the reference points of the characteristic Bezier polyline are specified by points in three-dimensional space P i(x i, y i, z i), i= 0, 1 ,…, m.
Then the spatial Bezier curve of degree m is determined by the equation having the following form:
where are the Bernstein polynomials.
The matrix representation of the parametric equations describing the spatial Bezier curve has the form:
0≤ t ≤ 1,
A more detailed description of spatial road routing is given in Chapter. 5.
Methodological support – a set of methodological materials that facilitate the functioning of CAD.
Professional CAD systems, as a rule, have methodological support in the form of “Reference Guides” in paper form. The main menu of such systems also contains a Help section, which provides a description of the main design procedures.
During the operation of CAD systems, experience is accumulated in the rational development of design solutions based on the entire set of system tools. This experience, as a rule, is presented in the form of “Practical Guides (Manuals)” and helps to improve the efficiency and quality of engineering work.
2.3. Information and organizational support
Information Support is a set of tools and methods for constructing an information base for design purposes.
The information support includes: state standards (GOST), construction standards (SN), construction norms and rules (SNiP), departmental construction standards (VSN), standard design solutions for structures and elements of highways. All of the above regulatory information materials exist in paper form or in the form of electronic analogues.
Another part of the information support exists only in electronic form and is an integral part of CAD. These are libraries of symbols (see Fig. 2.8), classifiers and codes, templates of typical elements as part of graphic algorithms.
Rice. 2.8. Library symbol for topographic plan
Regional information is also used in the design process. This includes information of a meteorological and environmental nature, data on the relief and geological structure of the area, information on the location of quarries of soil and stone materials, etc.
According to another classification, information can be divided into input, intermediate and output. Input - a set of initial data necessary for making a design decision. Intermediate - obtained earlier as a result of solving some problems and used to solve others, but not the final results of solving problems. Output - obtained as a result of solving problems and intended for direct use in design.
Organizational support is a set of organizational and technical measures aimed at increasing the efficiency of CAD functioning. These include: changing the organizational structure of the design organization, its departments and divisions; redistribution of functions between departments; changing the technology of design and survey work and personnel, improving the qualifications of designers in the field of CAD, organizing and operating quality management systems for design products based on international standards ISO 9001:2000.
- Back
- Forward
Send your good work in the knowledge base is simple. Use the form below
Students, graduate students, young scientists who use the knowledge base in their studies and work will be very grateful to you.
Posted on http://www.allbest.ru/
RAM personal computer
Introduction
2.1 Personal computers
2.2 Workstations
2.3 Servers
2.4 Mainframes
2.5 Cluster
2.6 Supercomputers
Conclusion
Bibliography
Introduction
The traditional form of using computers, concentrated in a computer center and operating only in batch mode, is not suitable for modern CAD systems. A computer will only become an effective, regularly used design tool when an engineer can quickly access the machine and just as quickly obtain solution results. Therefore, a group of external information input-output devices must be developed in the vehicle complex. At the same time, effective interaction between an engineer and a computer will be ensured only if the form of input and output information is convenient for humans and does not lead to the need to manually perform cumbersome and error-prone operations to encode or decrypt messages. Depending on the nature of the problems being solved, convenient forms of presenting information can be tables, drawings, graphs, text messages, etc.
Thus, the first of the requirements for CAD hardware specified at the beginning of the chapter stipulates the inclusion in the TS complex of both a standard set of external computer devices and additional devices for operational input-output of information, including in graphic form. This set of external devices is installed in the premises of the design department and is called the designer’s automated workstation (AWS).
The composition of the workstation depends on the nature of the tasks being solved in the design department. The workstation includes devices for input and output of information on punched tape; devices for autonomous input of information from punched cards or punched tapes; keyboard device for exchanging information between the operator and the computer by short messages; storage devices on magnetic disks (MD) and magnetic tape (NML); video monitor or graphic display; plotter (plotter); graphic information encoder (coordinate reader) or scanner; printer, modem or fax modem. The presence of many workstations in one CAD system, the possibility of simultaneous work on the equipment of several users' workstations and the placement of workstations in the territories of design departments dictate the need for a hierarchical construction of the TS complex with at least two levels of computers allocated in it. At the highest level there is one or more high-performance computers. These computers constitute a central computing complex (CCC), designed to solve complex design problems that require large amounts of computer time and memory. At the lowest level are the minicomputers (terminal computers) included in the workstation. The mini-computer in the workstation controls the operation of a set of external devices, the exchange of information between the workstation and the central control center; solves design problems that are relatively simple in terms of computer time and memory.
1. Basic requirements for CAD hardware
The following requirements apply to the technical support of CAD:
ease of use by design engineers, the ability to quickly interact between engineers and computers;
sufficient computer performance and RAM capacity to solve problems at all stages of design in an acceptable time;
the ability to simultaneously work with the technical means of the required number of users for the effective operation of the entire development team;
openness of the complex of technical means for expansion and modernization of the system as technology improves and develops;
high reliability, reasonable cost, etc.
Satisfying the listed requirements is possible only in the conditions of organizing technical support in the form of a specialized aircraft that allows operation in several modes. Such technical support is called a complex of CAD technical means (TS complex).
2. Types of computers and systems
Computers (computers) and computing systems (CS) are usually classified according to a number of characteristics. Depending on the performance and cost of computing equipment, several types of computers and computers are distinguished, and different generations of computer equipment had their own scale of types. Thus, until the mid-80s of the last century, computers were divided into micro-computers, mini-computers, large computers (high-performance computers) and super-computers. Currently, computers and computers are divided into personal computers, workstations, servers, mainframes, clusters and supercomputers.
The most widely used CAD systems are personal computers (PCs), workstations and servers.
2.1 Personal computers
The first personal computers appeared in the early 80s of the last century as a result of the transformation of mini-computers into relatively cheap desktop systems for individual use, thanks to the development of the elemental base of computer technology, which led to the creation of large-scale (LSI) and very large-scale (VLSI) integrated circuits.
Structurally, a personal computer (PC) consists of a case that houses the motherboard; video adapter (video card); disk drives - CD ROM, hard drives (hard drives) and floppy drives (flat drives); power unit; speaker The PC has reserve slots (expansion slots) for possible placement of printed circuit boards (expansion cards) - network controller, modem, and other additional devices. The PC also includes external (relative to the PC case) devices. As a rule, these include a keyboard, mouse, and monitor. In Fig. Figure 1 shows a typical PC block diagram.
Figure 1. Simplified typical block diagram of a personal computer
The motherboard is also called the system board. Motherboards are produced by a large number of companies. The motherboard has connectors for inserting a processor and RAM modules. The interface between the processor and other devices is carried out using buses and a chipset - a set of special chips installed on the motherboard, the so-called north and south bridges. To connect the CPU to the northbridge (system controller), the system bus (FSB -- Frontsidebus) is used. The system bus carries out data exchanges between the processor and the second level cache and through the northbridge with RAM. The PCI Express bus is used as a bus for connecting a graphics controller on modern motherboards.
The south bridge (peripheral controller) contains controllers for peripheral devices (hard drive, Ethernet, audio), PCI, PCI-Express and USB bus controllers for connecting peripheral devices, as well as bus controllers to which devices that do not require high bandwidth are connected. The interface with external drives (hard drive, magnetic disks, CD-ROM) is performed through drive controllers. Typically, the controllers are built into one of the chips and placed on the motherboard, and the drives themselves are connected to the board using the connectors available on it. Currently, controllers of the IDE (Integrated Drive Electronics) or EIDE (Enhanced IDE) types are used, allowing up to four devices to be connected to one controller. If it is necessary to increase the data transfer speed (for example, when using a PC as a file server), the SCSI interface (SmallComputerSystemInterface) is used. It allows connection of up to eight devices to one controller, data transfer speeds reach 80 MB/s. To connect the SCSI bus to PCI, a special SCSI adapter is required.
A video card includes video memory and a video processor that is used to offload the CPU for certain graphics operations and decoding data, such as input from a video camera. The motherboard also houses the BIOS (BasicInput/OutputSystem) block. This block performs the functions of storing PC configuration parameters, hardware drivers and the POST program, which, when the computer is turned on, checks the functionality of its devices.
2.2 Workstations
Workstations are computing systems focused on solving problems in specific applications, primarily in computer-aided design systems (CAD). Computers in CAD are focused on solving complex design problems, which leads to increased speed and memory capacity, as well as expanded capabilities for processing and visualizing graphic information of workstations compared to personal computers. Therefore, workstations usually have more complex structures and more expensive devices than PCs.
Workstation structure:
The motherboard is where the processor, memory chips, controllers and data buses are located.
Central processor - the overall performance of all processes depends on it. The power of this device is determined by its tactile frequency; the higher it is, the faster the device. The processor is the main element in all processes that occur between workstations on a computer network. When connecting several devices, it is desirable that they have processors of the same power, otherwise on more powerful computers the operating speed will be reduced due to weaker PCs.
Memory - for the normal functioning of a local network, servers and workstations must have a large supply of memory. In order to store, exchange, and host software needed for a network, workstations typically have multiple memory sources. Many modern PCs, when RAM is full, turn to virtual swap. It is not recommended to use virtual memory on office workstations for a long time; use network maintenance to increase the amount of operational memory reserves.
Network adapter - it is impossible to connect computers to a local network without a network adapter; it is the one that allows you to turn a computer from an ordinary device into a workstation. Network maintenance allows you to connect more than a hundred PCs into one circuit using a network adapter. This is a miniprocessor that allows workgroup computers to access a common database.
Differences between personal computers and workstations:
Price - Most business PCs cost less than a workstation.
Performance - The PC has enough power to handle most tasks, such as email, web surfing and word processing. While the workstation has great power - it can work with CAD systems, programs for creating animation, data analysis and photorealistic visualizations, creating and processing video and audio.
Reliability - the requirements for the operation of the components of a workstation are much higher than those of a PC. Every part (motherboard, processor, RAM, drives, graphics cards, etc.) is made with the understanding that it will last all day long. In many cases, workstations remain on and working on projects even after everyone has gone home. They leave them running overnight to process large databases, create animations, etc.
2.3 Servers
In computer networks, the functions related to servicing all network nodes are assigned to servers. A server is a computer that is designed to solve certain tasks of executing program codes, storing information, serving users and databases. The server provides maximum security and safety of the tasks performed, as well as their safety. A server is used to store files and websites of Internet users (hosting), respond to requests and provide requested information, process and execute scripts on websites, work with a database and a large number of users. Control over the operation of the server rests with the system administrator.
The server does not have to be designed to work with the Internet. Most often it is used in companies to provide a local network and store databases about clients, employees, products, as well as for Internet access. Using the server, the system administrator can obtain information about all computers on the local network and deny or allow access. In most cases, the server is not an ordinary personal computer. Typically, this is a workstation designed as a mini-tower, although there are different configurations depending on the specialization. Servers contain one or more high-performance processors, a large amount of RAM, RAID arrays of hard drives, and power supplies with the ability to operate autonomously in the event of a power failure. The server housing has increased dust protection and a powerful cooling system, as well as protection against accidental shutdown.
Based on their functional purpose, they distinguish between file, database, switching, application, mail servers, etc. Servers typically need to be faster, more reliable, and in many cases have more memory capacity than the computers in the client nodes.
2.4 Mainframes
Mainframes are called large computers. High performance and large memory capacity provide solutions to complex problems and allow the use of such computers as a central node of an aircraft that controls the operation of many simple terminals. In architectural terms, mainframes are multiprocessor systems containing one or more central and peripheral processors with shared memory, interconnected by high-speed data transfer routes. In this case, the main computing load falls on central processors, and peripheral processors provide work with a wide range of peripheral devices. IBM actively supports the transition in large corporate information systems to the use of mainframes as all data centers instead of a large number of distributed servers.
2.5 Cluster
A cluster is a distributed system of computers that operates as a single system with shared resources. The main goal that led to the emergence of clusters is to maintain the operability of the aircraft by redistributing the load when part of the resources fails. In addition, clustering is one of the ways to increase the performance of computers by sharing many computers. Clusters allow you to increase computing power because they are easily scalable.
Typically, the following main types of clusters are distinguished:
failover clusters (High-availabilityclusters, HA, high availability clusters),
clusters with load balancing (Loadbalancingclusters),
computing clusters (High performance computing clusters, HPC),
distributed computing systems.
2.6 Supercomputers
Computers characterized by the highest performance and price values among other types of computers and computers are classified as supercomputers. It is believed that supercomputers are computers with maximum performance. However, the rapid development of the computer industry makes this concept very, very relative: what ten years ago could be called a supercomputer, today no longer falls under this definition. The performance of the first supercomputers in the early 70s was comparable to the performance of modern PCs based on traditional Pentium processors. By today's standards, neither one nor the other, of course, belongs to supercomputers. In any computer, all the main parameters are interconnected. It is difficult to imagine a universal computer that has high performance and scanty RAM, or huge RAM and a small disk space. Hence the simple conclusion: a super-computer is a computer that has not only maximum performance, but also the maximum amount of RAM and disk memory in combination with specialized software with which this monster can be used effectively. As a rule, modern supercomputers are a large number of high-performance server computers connected to each other by a local high-speed backbone to achieve maximum performance within the framework of a parallel computing approach.
Cray-1 is the first supercomputer, created in 1976 by Cray Research, founded by the “father of supercomputing” Seymour Cray, after his departure from CDC. The peak performance of the Cray-1 was 133 Mflops. For comparison, the current number 1 in the TOP500 supercomputer ranking, Tianhe-2, has a computing power of 33.86 Pflops. The computer was purchased by the National Weather Service (So US residents owe their weather forecasts from 1977 to 1989 to this machine).
Twice a year, experts from the Lawrence Berkeley National Laboratory and the University of Tennessee publish the Top 500, which offers a list of the most powerful supercomputers in the world.
10. Cray CS-Storm
Location: USA.
Performance: 3.57 petaflops
Theoretical maximum performance: 6.13 petaflops.
Power: 1.4 MW.
9. Vulcan - Blue Gene/Q.
Location: USA.
Performance: 4.29 petaflops.
Theoretical maximum performance: 5.03 petaflops.
Power: 1.9 MV.
8. Juqueen - Blue Gene/Q.
Location: Germany
Performance: 5 petaflops.
Theoretical maximum performance: 5.87 petaflops.
Power: 2.3 MW.
7. Stampede - PowerEdge C8220.
Location: USA.
Performance: 5.16 petaflops.
Theoretical maximum performance: 8.52 petaflops.
Power: 4.5 MW.
6. Piz Daint - Cray XC30.
Location: Switzerland.
Performance: 6.27 petaflops.
Theoretical maximum performance: 7.78 petaflops.
Power: 2.3 MW.
5. Mira - Blue Gene/Q.
Location: USA.
Performance: 8.56 petaflops.
Theoretical maximum performance: 10.06 petaflops.
Power: 3.9 MW.
Location: Japan.
Performance: 10.51 petaflops.
Theoretical maximum performance: 11.28 petaflops.
Power: 12.6 MW.
3. Sequoia - Blue Gene/Q.
Location: USA.
Performance: 17.17 petaflops.
Theoretical maximum performance: 20.13 petaflops.
Power: 7.8 MW.
2. Titan - Cray XK7.
Location: USA.
Performance: 17.59 petaflops.
Theoretical maximum performance: 27.11 petaflops.
Power: 8.2 MW.
1. Tianhe-2 / Milky Way-2.
Location: China.
Performance: 33.86 petaflops.
Theoretical maximum performance: 54.9 petaflops.
Power: 17.6 MW.
3. Architecture of computing systems
The main difference between computers and computers is the presence of several computers (computers or processors) in their structures. Therefore, they are capable of performing parallel computations. Since aircraft appeared as parallel systems, we will consider the classification of architectures from this point of view. This classification of architectures was proposed by M. Flynn in the early 60s. It is based on two possible types of parallelism: independence of task threads (commands) existing in the system, and independence (unrelatedness) of data processed in each thread. According to this classification, there are four main aircraft architectures:
single command stream - single data stream (OKOD), in the English abbreviation SingleInstructionSingleData, SISD - single instruction stream - single data stream;
single instruction stream - multiple data stream (OSMD), or SingleInstructionMultipleData, SIMD - single instruction stream - single data stream;
multiple command stream - single data stream (MCOD), or MultipleInstructionSingleData, MISD - multiple instruction stream - multiple data stream;
multiple command stream - multiple data stream (MCMD), or MultipleInstructionMultipleData, MIMD - multiple instruction stream - multiple data stream.
The OKOD architecture covers all single-processor and single-machine versions of systems, that is, systems with one computer. All computers of classical structure fall into this class. Here, parallelism of calculations is ensured by combining the execution of operations by separate ALU blocks, as well as the parallel operation of input/output devices and the processor. The principles of organizing the computational process in these structures have been studied quite well. The OKMD architecture involves the creation of vector or matrix processing structures. Systems of this type are usually built as homogeneous: the processing elements included in the system are identical, and they are all controlled by the same sequence of commands. However, each processor processes its own data stream. This scheme is well suited to the problems of processing matrices or vectors (arrays), problems of solving systems of linear and nonlinear, algebraic and differential equations, problems of field theory, etc. In the structures of this architecture, it is desirable to provide connections between processors that correspond to the implemented mathematical dependencies. As a rule, these connections resemble a matrix in which each processing element is connected to its neighbors. Vector or matrix type of calculations is a necessary attribute of any supercomputer.
Conclusion
Computer systems, as powerful means of processing user tasks, are widely used not only autonomously, but also in computer networks as servers. With the increase in the size of networks and their development, the density of information flows and the load on means of accessing network resources and on means of processing tasks increase. The range of tasks solved by servers is constantly expanding, becoming diverse and complex. The higher the rank of a network, the more specialized they become. Network administrators must constantly increase their power and quantity, optimizing network characteristics to meet the increasing demands of users.
Computing processes in computers are controlled by operating systems that are part of the general software. The OS includes both programs for centralized management of system resources and programs for autonomous use of computing modules. The last condition is necessary, since aircraft usually provide for higher reliability of operation, for example, the requirement to maintain operability if it contains at least one serviceable module.
The requirement to increase productivity also implies the possibility of parallel and even autonomous operation of modules when processing individual jobs or batches of jobs. Depending on the structural organization of the aircraft, it is possible to identify some features of the construction of their operating systems. The operating systems of multi-machine aircraft are simpler. They are usually created as an add-on to the autonomous operating systems of individual computers, since here each computer has greater autonomy in the use of resources (its own RAM and external memory, its own separate set of external devices, etc.). They widely use software methods of local (within a computer center) and remote (network processing) integration.
Modern personal IBM PC-compatible computers are the most widely used type of computer, their power is constantly increasing, and their scope is expanding. These computers can be networked together, allowing tens or hundreds of users to easily exchange information and simultaneously access shared databases. E-mail tools allow computer users to send text and fax messages to other cities and countries using the regular telephone network and obtain information from large data banks. The global electronic communication system Internet provides, at an extremely low price, the ability to quickly receive information from all corners of the globe, provides voice and fax communication capabilities, and facilitates the creation of intracorporate information transmission networks for companies with branches in different cities and countries.
However, the information processing capabilities of IBM PC-compatible personal computers are still limited, and their use is not justified in all situations.
Bibliography
1. V.N. Datsyuk, A.A. Bukatov, A.I. Zhegulo. Methodological manual for the course "Multiprocessor systems and parallel programming" / Southern Federal University. Center for High Performance Computing.
2. Types of computers and systems / Bigor.
3. Automation of design of systems and controls / Moscow State University of Printing.
4. Technical support of automated systems / Bigor.
Posted on Allbest.ru
...Similar documents
Characteristics of technical and preventive maintenance systems for computer equipment. Diagnostic programs for operating systems. Interrelation of automated control systems. Protecting your computer from external adverse influences.
abstract, added 03/25/2015
Classification of electronic computers by time of creation and purpose. Von Neumann principles. Hardware implementation of a personal computer: processor, internal and external memory, motherboard. Basic peripheral devices.
abstract, added 05/24/2009
Requirements for technical support of computer-aided design systems. Computer networks; reference model of open systems interconnection. Network equipment of workstations in CAD. Access methods in local area networks.
presentation, added 12/26/2013
course work, added 11/22/2009
History of the development of computer science and computer technology. General principles of PC architecture, its internal interfaces. Basic input/output system. Motherboard. Display technologies and information storage devices. Amount of RAM.
presentation, added 10/26/2013
Structures of computers and systems. Von Neumann architecture, promising areas of research. Analog computers: availability and functionality of software. A set of system properties for the user.
course work, added 11/05/2011
Architectures of computer systems for concentrated information processing. Architectures of multiprocessor computing systems. Classification and types of computers by areas of application. Features of the functional organization of a personal computer.
test, added 11/11/2010
Selection of components for an office computer; their technical characteristics. Installation of the motherboard, cooling system, RAM, hard drive, and optical drive. Calculation of the cost of modernizing computer equipment.
course work, added 04/30/2014
Determination of prospects, directions and trends in the development of computer systems as a set of equipment and software for information processing. Development of specialization of computing systems and the problem of areas of application. Trends in the development of computer science.
abstract, added 03/17/2011
Characteristics of devices of the basic configuration of a personal computer: computer power supply, motherboard, processor, sound card, hard drive. Additional external drives. Operating principles and functions of laser drives and disks.
CHAPTER III. CAD TECHNICAL SUPPORT.
CAD hardware includes various technical means (hardware) used to perform computer-aided design, namely computers, peripheral devices, network equipment, as well as equipment of some auxiliary systems (for example, measuring) that support design.
The technical means used in CAD must provide:
1. implementation of all necessary design procedures for which appropriate software is available;
2. interaction between designers and computers, support for interactive mode of operation;
3. interaction between team members working on a common project.
The first of these requirements is met if there are computers and systems in the CAD system with sufficient performance and memory capacity.
The second requirement relates to the user interface and is met by including convenient data input/output tools and, above all, graphic information exchange devices in the CAD system.
The third requirement dictates the integration of CAD hardware into computer network.
As a result, the general structure of the CAD system is a network of nodes interconnected by a data transmission medium (Fig. 2.1). Knots(data stations) are design workstations, often called automated workstations(Workstation) or workstations (WS - Workstation), they can also be large computers (mainframes), individual peripheral and measuring devices. It is in the workstation that there must be means for the interface of the designer with the computer. As for computing power, it can be distributed among various nodes of a computer network.
Figure 2.1. Structure of CAD technical support
Data transmission medium represented by data transmission channels consisting of communication lines and switching equipment.
At each node you can select data terminal equipment(OOD) performing certain design work, and data channel termination equipment(DKD), designed to connect the DTE with the data transmission medium. For example, a personal computer can be considered as a DTE, and a network card inserted into the computer can be considered as an ADC.
Data channel - a means of two-way data exchange, including an ADC and a communication line. Communication line refers to a part of the physical medium used to propagate signals in a certain direction; examples of communication lines include coaxial cable, twisted pair wires, and fiber-optic communication line (FOCL). Close concept is channel (communication channel), which is understood as a means of one-way data transmission. An example of a communication channel could be a frequency band allocated to one transmitter in radio communications. In a certain line, several communication channels can be formed, each of which transmits its own information. In this case, they say that the line is divided between several channels.
Network types. There are two methods for dividing a data line: time multiplexing(otherwise time division or TDM - Time Division Method), in which each channel is allocated a certain time slice, and frequency division(FDM - Frequency Division Method), in which a certain frequency band is allocated to the channel.
In CAD systems of small design organizations, numbering no more than a few or tens of computers, which are located at short distances from one another (for example, in one or several adjacent rooms), the network connecting computers is local. Local computing network(LAN or LAN - Local Area Network) has a communication line to which all network nodes are connected. In this case, the topology of node connections (Fig. 2.2) can be bus, ring, or star. The length of the line and the number of connected nodes in the LAN are limited.
Rice. 2.2. Local area network topology options:
A) tire; b) ring; V) stellar
In larger-scale design organizations, the network includes tens to hundreds or more computers belonging to different design and management departments and located in the premises of one or several buildings. Such a network is called corporate. In its structure, one can distinguish a number of LANs called subnets, and means of LAN communication with each other. These tools include switching servers (subnetwork interaction units). If switching servers are united by data transmission channels separated from the departmental LAN, then they form a new subnet called supporting(or transport), and the entire network turns out to have a hierarchical structure.
If the buildings of the design organization are located at considerable distances from each other (up to their location in different cities), then the corporate network becomes larger in scale territorial network(WAN - Wide Area Network). In the territorial network there are main data transmission channels (backbone network), which have a significant length, and data transmission channels connecting the LAN (or a set of LANs of a separate building or campus) with the backbone network and called subscriber line or connection "last mile".
Usually creation dedicated backbone network, i.e. a network serving a single organization is too expensive for it. Therefore, they often resort to the services of a provider, i.e. an organization that provides telecommunications services to many users. In this case, communication within the corporate network over significant distances is carried out through public backbone network. As such a network, you can use, for example, a city or long-distance telephone network or territorial data transmission networks. The most common form of access to these networks currently is access to the global computer network Internet.
For many corporate networks, the ability to access the Internet is desirable not only for ensuring communication between remote employees of one’s own organization, but also for receiving other information services. The development of virtual enterprises operating on the basis of CALS technologies necessarily implies information exchanges through territorial networks, usually via the Internet.
The structure of CAD technical support for a large organization is shown in Fig. 2.3. Shown here is the typical structure of large enterprise CAD networks, called architecture client-server. In client-server networks, one or more nodes are allocated, called servers, which perform control or design functions common to many users on the network, and the remaining nodes (workstations) are terminal, they are called clients, users work in them. In general, a server is a set of software tools aimed at performing certain functions, but if these tools are concentrated on a specific computer network node, then the concept server refers specifically to the network node.
Rice. 2.3. Structure of the corporate CAD network
Client-server networks are distinguished by the nature of the distribution of functions between servers; in other words, they are classified according to server types. Distinguish file servers for storing files shared by many users, database servers automated system, application servers to solve specific applied problems, switch servers(also called network interconnection units or access servers) for interconnecting networks and subnets, specialized servers. to perform certain telecommunications services, such as email servers.
When servers are specialized for specific applications, the network is called distributed computing network. If an application server serves users on one LAN, then it is natural to call such a server local. But since CAD contains applications and databases shared by users of different departments and, therefore, clients of different LANs, the corresponding servers are classified as corporate servers, usually connected to the core network (see Fig. 2.3.).
Along with the client-server architecture, peer-to-peer networks are used, in which any node, depending on the task being solved, can perform both server and client functions. Organization of interaction in such networks with a number of nodes of more than several dozen becomes excessively complex, so peer-to-peer networks are used only in small-scale CAD systems.
In accordance with the switching methods, networks are distinguished with circuit switching And packet switching. In the first case, when exchanging data between nodes A And B the network creates a physical connection between A And B, which is used only by these subscribers during a communication session. An example of a circuit-switched network is the telephone network. Here, the transfer of information occurs quickly, but communication channels are used ineffectively, since long pauses are possible during data exchange and the channel is “idle.” When switching packets of a physical connection that would connect subscribers at every moment of a communication session K And I, is not created. Messages are divided into chunks called packages, which are transmitted in an extensive network from K To I or back through intermediate nodes with possible buffering (temporary storage) in them. Thus, any line can be divided by many messages, alternately passing packets of different messages with the maximum filling of the mentioned pauses.
 Where to unlock iPhone 4s. Unlocking iPhone. Official Unlock of all iPhone models. Recovery without saving information
Where to unlock iPhone 4s. Unlocking iPhone. Official Unlock of all iPhone models. Recovery without saving information How to install the old version of VK
How to install the old version of VK History of the ZX Spectrum computer
History of the ZX Spectrum computer Where can you quickly sell unwanted items online?
Where can you quickly sell unwanted items online?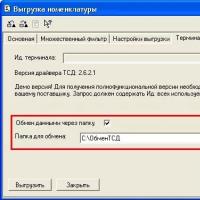 1c fresh how to unload products nomenclature
1c fresh how to unload products nomenclature "Bitrix24" - what is it?
"Bitrix24" - what is it? Desktop application for the portal
Desktop application for the portal