Pomocou radaru pre nesúlad. Príkladný akčný algoritmus pre manévrovanie pri práci s manévrovateľným tabletom manévrovateľným tabletom Ako merať rýchlosť
Typ dokumentu: Nástroje | Doc.
Popularita: 0,23%
Stránky: 16.
Jazyk: Ruská ukrajinská.
Rok publikácie: 2005.
Metodichn na VKAZіvki Tracy do Vincannya Roboti RLOB з Disciliplin "Trapher Experience і Zarp" pre Študentský štvrtý kurz v neprítomnosti na Ukrajine Insortna Spetsoun_d
Každý študent podľa jeho možnosti vykonáva 5 úloh vo forme ovládateľnej tablety a reaguje na 2 otázky na samostatnom liste. Formy manévrovateľných tabliet s vyriešenými úlohami a zoznam odpovedí sú privádzané do samostatného priečinka.
Verzia skúšobnej práce je vybratá podľa poslednej číslice osobného šifru.
OPOSTROČNOSTI OPTUMENTÁCIU ÚLOHY
1 1, 11, 21, 31, 41 1, 11
2 2, 12, 22, 32, 42 2, 12
3 3, 13, 23, 33, 43 3, 13
4 4, 14, 24, 34, 44 4, 14
5 5, 15, 25, 35, 45 5, 15
6 6, 16, 26, 36, 46 6, 16
7 7, 17, 27, 37, 47 7, 17
8 8, 18, 28, 38, 48 8,18
9 9, 19, 29, 39, 49 9, 19
10 10, 20, 30, 40, 50 10, 20
Pre príslušné vykonanie skúšobnej práce je potrebné preskúmať pravidlá č. 5, 6, 7, 8, 9, 10 MPPS-72, ako aj stručné metodické pokyny na grafickom riešení úloh na manévrovanom tablete.
Na titulnej strane priečinka testovacej práce špecifikujte názov, krstné meno, patronyic študent, osobné šifrovacie číslo, meno disciplíny, kurz, číslo volieb, špecialita.
Práca vykonaná v predpísanej lehote sa prenáša na overenie učiteľa.
Študent môže testovať, ktorý vykonal kontrolu a laboratóriu.
Stručné metodické pokyny na grafickom riešení úloh na manévrovanom tablete.
Postup pri riešení problému nezrovnalostí s jednou loďou
na ovládateľnom tablete
(Pozri prílohy 1, 2)
Podmienky obmedzenej viditeľnosti sú osobitnými podmienkami plávania, preto disciplína "radar simulátor" a "SARP simulátor" naznačujú, že v týchto podmienkach je prvé plávanie.
Pri plávaní s obmedzenou viditeľnosťou v otvorenom mori sa prehľad o okolí pomocou radaru vyrába hlavne na stupnici 12-16 míľ, a táto vzdialenosť je pravdepodobná vzdialenosť detekcie väčšiny ciev.
Dobrá námorná prax riešiť problém nezrovnalostí s súdmi v otvorenom mori, odporúča rozdeliť obrazovku RLS do troch zón:
1) Hodnotiaca zóna situácie od 12 do 8 míľ, kde sa určuje miera rizika zrážky, pár metrov pohybu blížiacich sa plavidiel a manévrovanie stráca;
2) manévrovacia zóna od 8 do 4 míľ. Opatrenia týkajúce sa nezrovnalostí sa odporúčajú čo najskôr po vytvorení rizika kolízie;
3) Zóna nadmerného zblíženia od 4 míľ. Pred vstupom na echo lode v tejto zóne by sa mal dokončiť rozpor manévrovanie v otvorenom mori, aby sa pri zmene situácie v dôsledku nesprávnych manévrov, bol čas a priestor na odstránenie rizika kolízie.
Pri plávaní v podmienkach obmedzenej viditeľnosti privilegovaných súdov nie je povinná zabrániť kolízii, a nasledujúca priorita manévrov je pridelená každému plavidlu s RLS.
1. otočte sa doprava;
2. Zníženie rýchlosti;
3. zastavenie lode;
4. Otočte sa doľava.
Hlavným predpokladom pri riešení problému nezrovnalostí na ovládateľnom tablete (situačná tableta) a s použitím SARP je imutibilita parametrov pohybu (kurzy a rýchlosti) vlastnej lode a iných plavidiel na obdobie súboru informácií a vyriešiť problém.
V súčasnosti sa tento problém vyrieši - momentom začiatku rozporu, "nulový bod", je čas odstránenia prvého odkazu na smeridlo a vzdialenosť k prvému cieľu.
Spätný čas na počiatočné parametre pohybu vlastnej lode je momentom konca nesúladu.
Keď je radar zapnutý, je potrebné správne nastaviť jas a zvýšenie prijímača, av prípade potreby znížiť účinky rušenia z vzrušenia a zrážok.
Postup pri riešení problému nezrovnalostí na manévrovanom tablete:
1) Z centra tablety držte vektor presunutím vlastnej lode za 6 minút, VN.
2) Urobte záznamy v spracovateľskej tabuľke radarových informácií o kurze (CN) a rýchlosť (VN) vašej vlastnej lode.
3) Z centra tablety polomerom DZAD. Kruh. Odporúča sa s obmedzenou viditeľnosťou na prevzatie podmienok otvoreného mora Dzad. \u003d 1,5 ÷ 2 míle a v stiesnených vodách DVD. \u003d 0,5 míľ.
4) Sledovanie situácie na obrazovke RLS vyberte na zmenu relatívnych polárnych súradníc (ΔP ≈ 0 a Δd 5) z obrazovky RLS, aby ste odstránili odkazy na ložisko a vzdialenosť nebezpečnej plavidlá, spustite stopky, Všimnite si čas lode, vykonajte záznamy v oblasti spracovateľskej tabuľky Radarové informácie pre nulovú chvíľu 0 ا, nosič a vzdialenosť pre plavidlo A.
6) Podľa týchto údajov položte pôvodnú situáciu na manévrovanú tabletu, s odkazom na nulové číslo 0 ا a veľký list A.
7) Používanie paralelného pravítka na odoslanie (držanie) vektor pohybujúcej sa vlastnej lode za 6 minút vn do nulového bodu a začal označiť písmeno f (pevné), vektor označuje písmeno VN.
8) Vykonajte časť kruhu v oblasti nulového bodu, doprava a vľavo od neho (alebo kruh) s polomerom VN z centra F, čo urýchľuje grafické riešenie problému.
9) Dňa 6. minúty odstráňte odkazy na ložisko a echo vzdialenosť rovnakej nádoby A a napíšte ich do tabuľky spracovania radarových informácií.
10) Podľa získaných údajov aplikujte 6 minútový bod na ovládateľnom tablete, čo ju označuje s číslom 6 ا.
11) Pripojte nulový a 6-minútový bod priamo, aby ste určili relatívny cieľový vektorovací vektor za 6 minút. Šípka vektorov je zameraná na 6 minútový bod. Označujú tento vektor vo.
12) Rozšírte vektor vo do centra tabliet, dostaneme log - trajektória, ktorá posunie ozveny plavidla a s nemennosťou kurzov a sadzieb vašich vlastných a protipráv.
13) Z centra tablety na denníku, vynechať kolmý a odstráňte hodnotu DCR.
14) Určite grafický vektor VO z nulového bodu na základňu kolmého potrubia DCR riadku Najkratšia konvergencia ciev TKR.
15) Výsledné hodnoty záznamu DCR a TKR na manévrovacej tablete.
16) Pripojte bod F s 6-minútovým bodom smeru dostaneme 6-minútový cieľový vektor VC, nasmerovaný v 6-minútovom bode, označte IT vc.
17) Použitie paralelného pravítka a meracieho merača na určenie skutočného kurzu a rýchlosti cieľa A, pričom nahrávanie na mastnej tablete;
18) Aplikujte preventívny bod (odporúča sa 12 minút, pričom sa zohľadní čas nastavenia času (TN.I. \u003d 6 min., Riešenie problému tr.Z. \u003d 3 min. A vykonávanie TM Maneuver \u003d 3 min) A stráviť bodkované čiary z IT Tencens do kruhu polomeru Dzad. Získavame dediny, pre ktoré by sa ozvenia plavidla mali pohybovať pri vykonávaní manévrovania. V lone bude bočné z plavidla a naopak.
19) Z 6 minútového bodu stráviť riadok paralelný s rokmi v opačnom smere, aby ste určili nebezpečný sektor kurzov (džús), nad ktorým musíte stiahnuť koniec vektora VN, aby ste vyriešili problém rozporu. Ak bod F je v šťave, nie je možné vyriešiť problém rozporu znížením rýchlosti.
20) Vyberte efektívny rozdiel manévrovanie v bezpečnej vzdialenosti a zmena kurzu a / alebo rýchlosť by mala byť pomerne veľká, takže si všimol prichádzajúcu loď. Turning manévr, vo všeobecnosti, vpravo, by malo byť aspoň 30-45 ° a zníženie rýchlosti by mala byť aspoň polovica.
Kombinovaný manévrovací mení v priebehu a rýchlosť v praxi sa zriedka aplikujú v dôsledku zhoršenia ovládateľnosti plavidla, keď sa rýchlosť zníži.
Podľa požiadaviek pravidla 19 MPPSS-72 "... pokiaľ je to možné, aby sa zabránilo:
- zmeny vľavo, ak je iná loď pred prechodom a nie je prekonaná;
- zmeny v smere lode umiestnenej pri prechode alebo za traverzou ";
- Malo by sa zohľadniť aj obmedzenia radaru, z dôvodu, ktoré ozvena plavidla vľavo nemusí byť pozorované na obrazovke.
Metóda grafického pásu
Grafické tesnenie poskytuje presnejšie informácie o situácii súdov a vykonáva sa na manévrovanom tablete M-78 (obr. 212)
Úloha nesúladu pozostáva z: 1) uplatňovania počiatočnej situácie na tablete a výstavbu trojuholníkov rýchlosťou relatívnych otáčok vektorov;
2) Odhady situácie nebezpečného zblíženia (kolízie) s súdmi, ktorých ozveny sú pozorované na obrazovke RLS, výpočtom času najkratšej konvergencie / KR, križovatka / "EP, vzdialenosť najkratšej konvergencie DPR a identifikovať ich skutočné a potenciálne riziká;
3) voľba a odôvodnenie manévrovania, prideľovanie plavidiel, s ktorými je potrebné rozptýliť;
4) Výpočet zvoleného manévrovania pomocou grafického prestavby vektorových trojuholníkov počiatočnej situácie;
5) Výpočet času začiatku manévrovania (berúc do úvahy manévrovacie prvky
Plavidlo), preventívny čas (3 alebo 6 minút) je zvolený, vzdialenosť nesúladu, čas rozdielov a vzdialenosť od svojho počiatočného kurzu počas manévrovania;
6) Uplatňovanie očakávaného riadku relatívneho pohybu (staré) a následnú kontrolu nad pohybom cieľa (pozorovateľná plavba).
Domnievajte sa podrobne proces riešenia problému rozporu s pomocou grafického (radaru), ktorým sa na manévrovacej tablete.
1. Pre pohodlie výpočtov trvá časový interval 3 alebo 6 minút, t e. 1/20 alebo 1/10 h.
2. Stavať na tablete zo svojho centra vektora, samozrejme a rýchlosť VL nášho plavidla.
![]()
Obr. 213. Riešenie rozporučného problému s grafickým pokládkom
![]()
Obrázok 214 Stanovenie potenciálneho nebezpečenstva a umiestnenia plavidla, pre nezrovnalosti, s ktorým je potrebné, aby sa manévroval
3. S výskytom na obrazovke RLS signálov ECHO určujeme ich delers a vzdialenosti a aplikujeme sa na tabletu.
4. Prostredníctvom rovnakých intervalov času (3 alebo 6 minút) v predchádzajúcom poradí aplikujeme nasledujúce body a po ich zlúčenine získame relatívne vektory rýchlosti.
5. S týmito vektormi, vytvárame vektorové trojuholníky, pre ktoré sa VC vášho nádoby z stredu tablety prenesie do prvého bodu L pripojením začiatku svojho vektora VC s druhým bodom 2, získame vektor rýchlosti pozorovanej plavidla w
6. Linka spojovacie body 1 a 2 budú predané pre stred tabliet, dostaneme LOD.
Posúdenie situácie je určiť stupeň nebezpečenstva kolízie súdov. Nájdeme najkratšiu vzdialenosť DKP, spúšťanie kolmo od stredu tablety do LOD a bodu priesečníka priebehu cieľového kurzu DNEP, pre ktorý vykonávame čiaru od stredu tabliet, paralelne s vektorom rýchlosti "Court-Ciele pre prechod
Identifikácia potenciálnej rýchlosti lodí sa môže vykonávať dvoma spôsobmi:
1) stratíme manévrovanie nášho plavidla (VC) alebo cieľa plavidla (V ") a určiť zmenou LOD a VO možné prechodu z potenciálneho nebezpečenstva do reálneho. Zmena kurzu, rýchlosti alebo kombinovaného manévrovania na pravej strane zhoršuje situáciu s plavidlom "B". V tomto prípade je manéver nevyhnutný s plavidlom "B" (obr. 214);
2) Používanie funkcií pohybu echo signálov v relatívnom pohybe na obrazovke RLS, ktorý bol podrobne detailný s metódou vizuálnej hodnotenia.
Ak chcete vybrať a ospravedlniť typ manévrovania, všetky možné možnosti strácajú: Zmena kurzu, rýchlosťou alebo iným spôsobom, všetky faktory spojené s plávaním v obmedzenom viditeľnosti, navigačných funkciách potápačskej oblasti, MPPSS-72 a Manéverovateľné schopnosti ich plavidla a možný manévrovací lodný gól. Plavidlo sa musí usilovať o bezpečný nesúlad s prijateľnou voľbou na výpočet manévrovania pomocou palety a pravítka. Minimalizuje grafiku na jednej alebo dvoch lodiach. Na obr. 215 Vypočítajte manévrovanie na bezpečný nesúlad zmenou svojho kurzu doprava. Pozícia preempovaných bodov nemá vplyv na spôsob výpočtu pomocou vektorových trojuholníkov pôvodnej situácie. Mal by sa vždy pamätať, že okamih preventívneho bodu je podmienený momentom konca manévrovania.
Momentom začiatku manévrovania jeho plavidla sa vypočíta s prihliadnutím na manévrovacie prvky plavidla (zotrvačnosť, brzdenie, sústruženie atď.).
![]()
Obr. 215 Výpočet manévrovania pre nezrovnalosti na zmenu kurzu doprava; Výpočet sa vykonáva s nádobou "B"
Vo vektorovom trojuholníku nádoby "A" vektor našej rýchlosti odbočte doprava na vypočítaný uhol. Dostaneme nový vektor relatívnej rýchlosti vo a pripojíme bod _2 s koncom otočného vektora VQ. Paralelne, vektory relatívnej rýchlosti V "o z preventívneho bodu vykonávajú" A ". Preventívny bod sa prijíma v rovnakom časovom intervale. Potom je možné určiť čas rozdiely v plavidiel TPCX a D0TX Odpadová vzdialenosť od priebehu nášho plavidla (pozri obr. 215).
Ak chcete vypočítať, použijeme nový vektor relatívnej rýchlosti w, vzdialenosť odpadu sa vypočíta na tabletu. Ak to chcete urobiť, na riadku nášho nového kurzu, položený od centra tablety, odložíme vzdialenosť, že naša loď prejde počas rozporu. Potom z výsledného bodu vynechať kolmý na líniu počiatočného kurzu. Segment tohto kolmej bude vzdialenosť od kurzu na tabletovej stupnici.
Výsledok manévrovania je riadený prieskumnými. Na tabletu sa aplikuje nielen plavidlo, relatívne, ku ktorému manévrovanie, ale aj iné nádoby, ktoré predstavujú potenciálne nebezpečenstvo. Tieto línie očakávaného relatívneho pohybu sa vykonávajú na kontrolu vývoja situácie po manévrovaní, aby sa zistili manévrovanie iných lodí včas, ako aj v prípade chýb vo výpočtoch a grafických budovách.
Z vyššie uvedeného vidíme, že obe metódy sú vzájomne prepojené a vzájomne dopĺňajú, zabezpečujú riešenie problémov v bezpečnom rozpore s používaním radaru v podmienkach obmedzenej viditeľnosti.
Na niektorých lodiach nad obrazovkou RLS je nainštalovaná zrkadlová tableta. Toto je pomocné zariadenie, ktoré je optickým systémom Nonparaxus. Výhodou zrkadlovej tablety je, že umožňuje vykonávať grafické tesnenie bez prerušenia pozorovania na obrazovke RLS.
Pravidelne zlepšovanie kvalifikácií, majitelia námornej flotily prechádzajú školenia, aby vyriešili problémy na simulátoroch radar.
Vzhľadom na nemožnosť dohodnutých činností lodí (lode) v podmienkach obmedzenej viditeľnosti je počet nezrovnalostí uvedený v IPTSU nie je v kategorickej forme, ale vo forme odporúčaní. V súlade s pravidlom 19 p. Plavidlo, ktoré našiel iné plavidlo s radarom, musí najprv určiť, či existuje riziko kolízie. "Ak existujú pochybnosti o nebezpečnosti kolízie, malo by sa predpokladať, že existuje" (pravidlo 7 p. "A").
Výber manévrovania, aby sa zabránilo nadmernému zblíženiu, závisí od situácie. Manévr môže v rovnakom čase poskytnúť zmenu kurzu, rýchlosť, ako aj na druhej strane. Zmena kurzu a rýchlosti by mala byť významná. Malé konzistentné zmeny v kurze a rýchlosti vytvárajú ťažkosti pri interpretácii radarových informácií na súťažnej lodi. Pri zmene rýchlosti by sa malo chápať tak, aby zmenšili alebo zastavili stroje, pretože zvýšenie rýchlosti v podmienkach obmedzenej viditeľnosti je v rozpore s pravidlami.
Tabuľka 18.2. Taktické a technické údaje nejakého navigačného radaru

Manéver je len zmena kurzu je účinná, ak je zmena kurzu vykonaná vopred, keď je dostatok vodného priestoru a keď tento manéver nespôsobí nadmernú konvergenciu s inými loďami. Voľba priebehu kurzu je poskytovaná veliteľom lodí, ale pravidlá odporúčajú, aby sa zabránilo:
Zmeny vľavo, keď je druhá nádoba pred traverou, ak táto nádoba nie je prekonaná;
Zmeny v smere plavidla umiestneného na traverke alebo za traverou.
Analýza situácie a definíciu prvkov pohybu cieľa (EDC)
Analýza situácie s použitím ovládateľnej tablety sa vykonáva nasledovne (obr. 18.1):Miesto jeho lode sa posudzuje v strede tablety;
Na ložisku a vzdialenosti, merané radarom po 1-2 minútach, sa aplikujú na tabletu aspoň dve miesta cieľa;
Prostredníctvom získaných bodov M1, M2, M3 drží čiaru relatívneho pohybu LOP1;
Z centra tablety do Lod1 sa kolmina COP1 zníži, ktorej dĺžka je najkratšia rozdiel v DKV.
Ak je DKP viac dávok, hrozba nadmerného (nebezpečného) zblíženia nie je. Ďalšie výpočty a manévre sa nevyžadujú, kým cieľ zmenia kurz ani rýchlosť.
Ak je DKP menší dávky, definícia EDC sa stanoví:
Od bodu do vektora rýchlosti svojho vozidla VK;

Obr. 18.1. Analýza situácie, definície EDC a výpočet manévrovania nezrovnalostí s jedným cieľom na manévrovacej tablete
- Zo konca vektora VK sa vykonáva riadok, paralelný LOD1 na tomto potrubí, vektor relatívnej rýchlosti VP, ktorý je vypočítaný vzorcom

- Pripojenie bodu až s koncom vektora VR sa získa vektor rýchlosti VM;
Rýchly čas s výhľadom na najkratšiu vzdialenosť

Aby ste analyzovali situáciu a definovali EDC na ovládateľnom tablete pomocou karty "Palma", vykonávajú sa tieto kroky:
Manévrovateľná tableta sa umiestni na stôl a koordinuje stupnicu pevných rozsahov rozsahu (NKD) s kruhmi tabliet;
Na kruhoch tabletu sa na diaľku zapíšu a vypnú NKD;
Stráviť riadok kurzu lode na tablete (počítanie vašej lode v strede) a kombinovať ho s označením obrazu;
Tablet upevnite a aplikujte počiatočné miesta pozorovaných cieľov;
Po 1-2 minútach sa aplikuje na tabletu aspoň dve až tri miesta každého cieľa;
Správať linky relatívneho pohybu každého cieľa.
Umiestnenie LOD a veľkosti DKP sú možné ciele, s ktorými je možná nadmerná konvergencia. Ďalšie spracovanie informácií na výpočet EDC je možné vykonať, ako je uvedené vyššie. Na urýchlenie prijatia EDC sa tlačí nasledujúci príjem:
Tableta s vytlačenými gólmi sa posunula späť rýchlosťou na sumu, ktorú loď prešla počas pozorovania vzdialenosti;
NEPOUŽÍVAJTE NOVÉ CIELE, ZAPNUTIE NOVÉHO TIELU ZAHRNUTIE Tabletu zakaždým, keď sa tableta vráti do rýchlosti prejdenej vzdialenosti;
Pripojením správneho miesta cieľov sú vektory skutočnej rýchlosti každého z nich zamerané z predchádzajúcich bodov na nasledujúce;
Veľkosť pravých rýchlostných vektorov sa vypočíta ako obvykle, cez vzdialenosť a čas pozorovania.
Zadaná metóda je menej presná ako predchádzajúca, ale umožňuje rýchlo oceniť situáciu pri stretnutí s niekoľkými loďami.
Ak existuje skutočný pohyb v režime radaru, je možné prijať EDC priamo z indikátora a rýchlo zistiť ich zmenu. Avšak, na indikátore bežiacej v pravom režime pohybu, definícia DKP a TKR je ťažké preto, aby presne určili tieto hodnoty, je potrebné presunúť do režimu relatívneho pohybu.
Definícia EDC na veľkej mape (1: 50 000; 1: 25 000) sa vyrába v navigačných vzťahoch, kde výpočet rozporného manévrovania môže viesť iba k nebezpečnému kurzu. V tomto prípade má navigátor možnosť dať tesnenie pre seba a pre cieľ v absolútnom pohybe bez oddelenia od situácie navigácie. V prípade použitia automatického podporovateľa existuje príležitosť mať súčasné súradnice svojej lode na udržanie tesnenia na niekoľko účelov a jasne sledovať situáciu.
Hlavné nevýhody metódy: neschopnosť rýchlo určiť riziko kolízie; Najkratšia vzdialenosť k cieľu DKP priamo z tesnenia nie je možné získať; Na mape si môžete aplikovať len bod priesečníka skutočných kurzov. Preto sa odporúča súčasne s tesnením v absolútnom pohybe, sa odporúča analýza situácie a výpočtov na rozpor, aby sa vytvorili na ovládateľnej tablete predpony "PALMA" s kontrolným systémom na mape.
Výpočet a kontrola rozporného manévrovania s jedným gólom na manévrovanom tablete
Ak existuje hrozba nadmerného zblíženia, t.j. keď je DKP nižší ako DOS, musíte zmeniť kurz alebo rýchlosť vašej lode tak, aby cieľ prechádza zo stredu tabliet (body k) vo vzdialenosti viac ako D03. Na výpočet manévrovania na tablete sa vytvárajú tieto opatrenia (obr. 18.1):Vypočítať a aplikovať na LOD1 Preventívna pozícia cieľa VC; Veľkosť M3MC \u003d VRTC, kde TZ \u003d 2-4 min, v závislosti od tréningu operátora;
Z bodu MC, dotyčnica k obvodu tablety, zodpovedajúcej vopred určenej vzdialenosti D03 a doske rozdielu; získať nový riadok relatívneho pohybu cieľa LOD2;
Dva nové vysokorýchlostné trojuholníky sú postavené, pre ktoré sa z konca vektora VM, je vedenie vykonáva v opačnom smere, paralelné LOD2 (na obr. 18.1 je znázornený bodkovanou čiarou), až do priesečníka s a Kruh tablety zodpovedajúceho VK;
Z dvoch vektorov QC "a kK" si vyberte ten, v ktorom bude vektor relatívnej rýchlosti VP väčší v absolútnej hodnote a CC sadzba "rýchlo povedie k rozporu s cieľom.
Podobne sa manévrácia vypočíta zmenou rýchlosti kurzu. Po odbočení na vypočítaný kurz (zmena rýchlosti) pozorovania je cieľom pokračovať a riadenie manévrovania je riadené použitím cieľových miest na tablete. Ak miesto účelu klesne na linku LOD2, manévrovanie sa vykonáva správne. Ak je miesto cieľa M5, M6, M7 ležať na linke LOD3, paralelné Lod2, znamená to, že otočení sa začalo skôr ako vypočítaný čas a že rozdiel sa vyskytne na diaľku, väčšie D03. Zmeňte smer LOD, t.j. posunutie miesta účelu v jednom smere, označuje zmenu EDC, ktorá bude vyžadovať nové výpočty.
Vlastnosti používania Hollc "Ocean"
Zahŕňa radar "Ocean", je tu výpočtové zariadenie, ktoré umožňuje (po manuálnom zachytení cieľa ECHO) určiť DKP, TKR a EDC. Presnosť kalkulačky sa vyznačuje nasledujúcimi hodnotami:DKP je určený presnosťou 2-3 kabíny;
TCR sa stanoví s presnosťou asi 2 minúty;
Priebeh blížiaceho sa plavidla je určený s presnosťou 5-10 °, mŕtvice - od 0,5 do 1 ton.
Výpočet, roztečný manéver je vyrobený na manévrovanom tablete, ako je uvedené vyššie. Výpočtové zariadenie umožňuje napodobniť vybraný manéver (na "stratiť" vopred) a odhadnúť možné výsledky, zatiaľ čo LOD je zvýraznený na obrazovke indikátora.
Hlavné možnosti nesúvisiacich s jedným cieľom sú uvedené v § 23.11.
Výpočet na manévrovacej tablete z rozporného manévrovania s niekoľkými cieľmi v rovnakom čase
Rozdiel manévrovanie s niekoľkými protiľahlými lodiami je súčasne najťažšie, ale potreba toho, aby sa vyskytne čoraz viac, najmä v oblastiach živej lodnej dopravy. Metódy výpočtu tohto manévrovania sú zatiaľ založené na používaní špeciálnych paletov, skryť od operátora fyzický význam manévrovania, a preto nebudú očkované na flotile.Najviac racionálne je výpočet s výstavbou sektorov nebezpečných relatívnych kurzov (COOK) navrhnutých O. G. Morava. Výpočet manévrovania v navrhovanej metóde sa vykonáva nasledovne (obr. 18.2):
S detekciou na obrazovke protichodných storočiek (objekty č. 1, 2, 3) vedú pre každú z nich relatívne tesnenie na mastnej tablete;
Po vykonaní LOD2 a LOD3, odhaliť riziko nadmerného zblíženia s jedným alebo viacerými cieľmi, určiť ich EDC (VM1, VM2_ a VM3);
Pre cieľ s maximálnou relatívnou rýchlosťou (zblíženie, s ktorým sa DCR vyskytne skôr) priraďte moment svojho príchodu do preventívnej polohy a aplikuje sa v tomto čase predpovedané polohy každého cieľa 1MC, 2 MC, HP;
Z predsudkovej pozície každého cieľa sa tangenty vykonávajú obvodom DOS, ktorý určuje nebezpečný sektor (OS) každého cieľa;
Na konci každého vektora skutočnej rýchlosti Target VM1, VM2, VM3 vybudovať nebezpečný relatívny sektor kurzov;
Pre bezpečné oddelenie so všetkými cieľmi, súčasne meniť ich kurz alebo rýchlosť tak, aby koniec jeho velocity vektor VK bol mimo kuchár.

Obr. 18.2. Výpočet rozporného manévrovania s niekoľkými gólmi súčasne na manévrovanom tablete
Na obr. 18.2 Je možné vidieť, že zníženie rýchlosti na hodnotu V "K vám umožňuje rozptýliť so všetkými cieľmi na DKP viac Dow. Ak koniec jeho vektora vektora VV bude ležať na hranici COP-1, potom Rozdiel s účelom č. 1 sa vyskytne vo vzdialenosti Dow, as ostatnými - vo väčšej vzdialenosti. Ak bude koniec jeho velikánosti vektora V "" K bude v bode priesečnosti strán SOK -2 a COP-3, potom sa vyskytne rozpor na DOW s týmito dvoma cieľmi a s cieľovým číslom 1 - vo väčšej vzdialenosti. Vypočítané možnosti pre nezrovnalosti, ktorú vykazujú veliteľ lode, aby si vybral a schválil jeden z nich , Koniec manévrovania nezrovnalostí so všetkými cieľmi možno považovať za okamih príchodu posledného z nich na relatívnu preštudovanie.
* V režime automatickej prevádzky, presnosť definície ložiska a vzdialenosť RLS "oceán" pri vzdialenostiach do 16 míľ je 0,5-0,7 ° a 30-40 m.
Dopredu
Obsah
späť
Tesnenie na ovládateľnom tablete.
1. Skutočné tesnenie.
Takéto tesnenie sa môže uskutočniť priamo na veľkom meradle cestovnej navigačnej mape alebo listu papiera. Podstatou metódy je nasledovná. Po našiel echo signál inej nádoby na obrazovke indikátora, je určený svojím ložiskom P1 a vzdialenosťou D1, nechajú stopky, všimli si, že loď T1, priebeh jeho križovatky KN a odpočítavanie Laga OL1. Umiestnenie ECHO A1 sa aplikuje pozdĺž ložiska a vzdialenosti vzhľadom na jeho umiestnenie, po výbere požadovanej stupnice (obr. 1). Po určitom časovom období (pre výpočty, interval v 3 alebo 6 minút) pozorovania sa opakujú (P2, D2, T2, OL2) a miesta ich plavidiel 02 a pozorovaná nádoba A2 sú spôsobené. Po výdavkoch cez body A2 a A2, priamku, získavame riadok skutočného pohybu cieľa CC.
Vzdialenosť medzi bodmi A 1 a A2 a časom T1 a T2 môžete určiť rýchlosť cieľového VC a vypočítať, kedy a v ktorej vzdialenosti prekročí priebeh nášho ústrojenstva plavidla a DPER.
Na určenie vzdialenosti najkratšej konvergencie DKR a času k nemu sa TCR z bodu A2 odloží na bok oproti svojmu priebehu, plachtenie nádoby počas prvého a druhého pozorovania A2F \u003d O1O2. Segment O1C vykonaný kolmo na líniu prechádzajúcou cez body A1 a F budú vzdialenosťou najkratšej konvergencie. Umiestnenie súdov v čase najkratšej konvergencie (body O1 a A4) možno nájsť v paralelnom pohybe segmentu O1C na O4A4. Rýchly čas na najkratšiu vzdialenosť

Na určenie okolností stretnutia a prvkov pohybu iného plavidla sú dostatočné dve pozorovania. Avšak, aby sa vylúčila zmeškanie v pripomienkach a uistite sa, že prvky ostatných pohybových pohybov v období pozorovania sú neplatné, odporúča sa zvýšiť počet pripomienok. Nájdenie troch časovo aplikovaných cieľov v tom istom čase (A1, A2, A3) Time Interval (A1, A2, A3) na jednej priamej priamej a rovnosti vzdialeností A1A2 \u003d A2A3 naznačujú, že neexistuje nedostatok pri pozorovaní a invácii Prvky cieľového pohybu počas T1 až T3.
Výhody metódy pravého tesnenia by sa mali pripísať jeho viditeľnosti. Nevýhodou je relatívna zložitosť grafických konštrukcií potrebných na určenie hlavných okolností stretnutia: vzdialenosť najkratšieho zblíženia a času na to.
2. Relatívne tesnenie.
Toto tesnenie získal rozšírený rozšírený, pretože hlavné otázky sú rýchlo a jednoducho a ľahko vyriešené: najkratšia vzdialenosť je skúška a po akom čase. S relatívnou pokládkou, okolností stretnutia a prvkov pohybu cieľa v hnuteľnom súradnicovom systéme, ktorého začiatok je prijatý na mieste pozorovateľa. To zodpovedá skutočnému obrazu, ktorý je nádoba pozorovaná na obrazovke indikátora relatívneho pohybu.
Z hľadiska miesta pre miesto jeho plavidla položte pozorované P1 a P2 a P2 a vzdialenosť D1 a D2 (obr. 2), cez získané body A1 a A2 sa uskutočňuje LOD. Dĺžka kolmého operačného systému, znížená z bodu relatívneho pohybu, je vo zvolenej vzdialenosti najkratšej konvergencie DKR. Rýchly čas na najkratšiu vzdialenosť


S relatívnym pokládkom sa rýchlo určia vzdialenosť, v ktorej sa cieľ prekročí gólom cez našej plavidle. Aby to urobilo, stačí merať vzdialenosť OP. (Ak LOD prejde v našej nose, určte bod priesečníka účelu našej kurzy, a ak LOD prejde v našom krmive - bod priesečníka nášho cieľa plavidla, pre ktoré sa stretne tabletu vykonáva riadok rovnobežný s križovatkou s LOD). Doba priesečnice Tperu bude určená pridaním svedectva lodných hodiniek v čase nájdenia umiestnenia signálu ECHO v bode A2 časového intervalu:

Je potrebné pripomenúť, že v prvom rade musí vesfodenta určiť hlavné okolnosti stretnutia, t.j. DKR a TKR, a potom definovať prvky pohybu cieľa.
Skutočným pohybom cieľa je súčet dvoch pohybov - relatívna
A pozorovateľské plavidlo alebo
Vzhľadom na komutátnosť súčtu vektorov ![]() môže byť najdený
môže byť najdený
Dve cesty.
Budovanie vektorového trojuholníka (pozri obr. 2), znázornené pevnými čiarami, sa nazýva rovno. Za ním sú začiatok vektorových vektorov (trate chodníkov) položených v smere pohybu ciev v jednom bode.
Použije sa aj inverzný konštrukt, v ktorom sú vektory, ktoré sú odložené smerom k pohybu súdov konvergované s ich koncami do spoločného bodu (znázorneného bodkovanou čiarou).
V budúcnosti budeme predovšetkým používať priame výstavbu, pretože je pohodlnejšie pri riešení úloh nesúvislosti.
Dĺžka vektora pohybu ciev by sa mala rovnať zvolenej stupnici plávania jeho plavidla počas pozorovaní na vytvorenie vektora trojuholníka. Dĺžka získaného cieľového vektora zodpovedá plávaniu cieľa počas pozorovaní.
3. Manéverovateľná tableta.
Manévrovateľná tableta je mriežkou polárnych súradníc. Ak chcete urýchliť osady spojené s plávaním nádoby počas pozorovania, na manévrovateľnú tabletu je umiestnená logaritmická stupnica. Je konštruovaný nasledovne: Na priame štart z východiskového bodu v určitom rozsahu sa segmenty odkladá rovnajúca sa desatinným logaritmom čísel od 0,1 do 60 a digitalizovaných v hodnotách týchto čísel. Vzhľadom k tomu, v rámci 60 jednotiek akcie so zápisnicami sú podobné akcie s číslami v desatinnom systéme, akákoľvek vzorka na stupnici možno priradiť názov "čas", "vzdialenosť" alebo "rýchlosť" a v dobre známych hodnôt Dvaja z nich nájdu tretiu, riešenie podielu
https://pandia.ru/text/80/090/images/Image012_74.gif "Šírka \u003d" 331 "Výška \u003d" 26 "\u003e
Pri použití logaritmickej stupnice je potrebné pripomenúť, že "top" nohy cirkulácie (nainštalované na veľkých počtoch) vždy zobrazuje čas, a "nižší" (nainštalovaný na menšom počte) - rýchlosť a vzdialenosť.
Z pozorovaní je relatívny pohyb značky - 2,2 míľ za 8 minút. Nájdite relatívnu rýchlosť.
Dodržiavame spodnú časť cirkulácie pre divíziu 2.2 a hornú časť - na rozdelenie stupnice "8";
bez zmenu riešenia Circulat presunieme hornou časťou cirkulácie, aby sme rozdelili mierku "60". Spodná noha cirkulácie zobrazí relatívnu rýchlosť vo \u003d 16,5 UZ.
t \u003d 17 min, v \u003d 15 UZ. Nájdite vzdialenosť S.
Horné nohy cirkulu sme dali na divíziu "60", tým nižšia "15";
bez zmeny kruhového roztoku presunieme horné nohy cirkulácie, aby sme rozdelili mierku "17". Spodná noha cirkulácie zobrazí vzdialenosť s \u003d 4,3 míľ.
S V \u003d 17, nádoba prešla S \u003d 8,7 míle. Určite čas, na ktorý loď prechádza túto vzdialenosť.
Horné nohy cirkulára sme dali na divíziu "60", a zdola na rozdelenie stupnice "17";
bez zmeny roztoku ZIRCULULY, dal spodnú časť cirkulácie na rozdelenie mierky "8.7". Horné nohy cirkulácie ukážu čas t \u003d 31 min.
4. Výber a odôvodnenie manévrovania pre nezrovnalosti v danej vzdialenosti.
Ak DKR< Dзадто необходимо предпринять маневр для расхождения с судном-целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию и выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя tкр, VO и Dзад, выбирает время начала маневра. Последующая графическая прокладка служит для проверки безопасности выбранного маневра и уточнения его величины.
Grafické tesnenie na odôvodnenie rozporného manévrovania v danej vzdialenosti je znázornené na obr. 3. Vykonáva sa v nasledujúcom poradí:
na LOD pre odhadovaný čas manévrovania alebo na zamýšľanú vzdialenosť manévrovania, bod cieľového umiestnenia v čase začiatku sporného manévrovania;
mentálny zákrut vektora alebo zmena jeho dĺžky v súlade s zvoleným pohľadom na manévrovanie určuje stranu zvrátenia životnosti manévrovania;
od bodu m vynakladá na dotyčnicu DZAD olodu, zatiaľ čo dve možné tangenty na DVAD, je ten, ktorý zodpovedá strane obrátenia LOD s zvolenou formou manévrovania;
cez koniec vektora, paralelne so starším v smere oproti smeru staršieho, vektor novej relatívnej rýchlosti sa vykonáva;
ak je manéver zvolený zmenou kurzu, nový smer vektora rýchlosti velikánosti pozorovateľa je obrátený okolo bodu O1 pred križovatkou s vektorom nového vektora relatívneho otáčok; uhol medzi vektormi a určí požadovaný uhol vlnovej dĺžky;
ak je manéver zvolená rýchlosť, nová vektorová vektor pozorovateľa je rovná vektoru vektora z bodu O1 k novej relatívnej rýchlostnej línii;
ak je kombinovaný manéver zvolený kurzom a rýchlosťou, potom nájsť nový priebeh pozorovateľskej plavidiel okolo bodu O1, vektor vektora pozorovateľa vektora sa znižuje v súlade s odhadovaným zdvihom.

5. Účtovníctvo zotrvačnosti plavidla.
Pri riešení problémov v predchádzajúcich kapitolách sa predpokladalo, že loď okamžite zmení svoje prvky pohybu a LOD počas manévrovania, ostro zmení svoj smer na osivo. V skutočnosti to je, samozrejme, a nie je potrebné zvážiť zotrvačnosť plavidla.
Cirkulačné účtovníctvo.
V súlade s NSHP-82 sú prvky otáčania prezentované v tabuľke manévrovacích prvkov vo forme grafu a tabuľky, keď cirkulujú z úplného predného dopytu na pravej a ľavej strane tovaru a v predradníkovi s polohou Volant "" na palube "" (\u003d 35 °) a "na absolvent" (\u003d 15 ÷ 20 °). Pri riešení úloh tejto kapitoly sa predpokladá, že sa použijú schémy cirkulácie zobrazené na obrázku. 4 pre manipuláciu volantu \u003d 20 °. Treba mať na pamäti, že parametre skutočného obehu plavidla sa môžu výrazne líšiť od tabuľky v závislosti od rýchlosti rýchlosti, jeho pristátia (roll a diferenciálu), zrážania a hĺbkového pomeru, smeru a sily vetra a vzrušenia.

Keď sa kurz zmení pozorovateľom nádoby (obr. 5), vzhľadom na umiestnenie cieľa sa posunie pozdĺž krivotrárnej trajektórie z bodu M1 na LOD (v čase začiatku sprievodcu lodného manévrovania) bod f na starý (na konci manévrovania). Cieľ sa v budúcnosti pohybuje využitím na diaľku skutočného relatívneho pohybu cieľa bude ťažšie. Kvôli poklesu rýchlosti nádoby-pozorovateľa na cirkulácii agenta nebude rovnobežná s vektorom V0P, kým náš nádoba vytočí počiatočnú rýchlosť zdvihu. V tomto prípade pokles v rýchlosti obehu čiastočne kompenzuje. V mnohých prípadoch (napríklad, keď sú nezrovnalosti s protivníkom), kvôli poklesu rýchlosti sledovania lodí na prelome https://pandia.ru/text/80/090/images/image016_68.gif "Šírka \u003d" 600 "výška \u003d" 369 "\u003e
1. Spôsob relatívneho medziproduktu.
Z grafického upravovania sa nachádza požadovaný roh kurzu; Z tabuľky manévrovacích prvkov v rohu weagle, čas strávený loďou na prelome, tmán; Uhol medziľahlého kurzu a medziproduktu SPRLUCHU; Z bodu M1 polohy cieľa v čase začiatku otáčania sa odkladá počas otáčania; Od konca vektora na boku, inverzný prechodný kurz, medziľahlé plachtenie SPR sa odloží; Prostredníctvom začiatku vektora SPR sa uskutočňuje prieskumné paralelne.
Metóda je presná, ale časovo náročná. Pri riešení úloh na moste plavidla sa neuplatňuje. Používa sa v porovnaní s nehodami a ako referencia pri vyhodnotení presnosti približných metód.
2. Spôsob podmieneného pred-dot bodového bodu.
OLODA sa nevykonáva z miesta miesta M1 cieľa v čase začiatku manévrovania, a z podmieneného preventívneho bodu m, odkazuje na LOD dopredu pre čas prístroja Tperu. V prvej aproximácii trvá polovica času otáčania polčas. Tak, s metódou berúc do úvahy cirkuláciu, otáčanie pozorovateľskej nádoby začína na trase ~ 0,5 Tmman skôr, ako je cieľ plavidla prichádza do bodu, z ktorého sa staršie uskutočnilo.
Metóda sa v praxi najčastejšie uplatňuje. Presnejšie pre bojové ciele a menej presné pre ciele, ktoré prebiehajú na konvergovanie kurzov. Nie je použiteľný, keď satelitné nádoby otáčajú, pretože v tomto prípade v0 \u003d 0 a s akýmkoľvek bodom TPR M a M1 sa zhoduje.
3. Spôsob zavedenia pozmeňujúcich a doplňujúcich návrhov k DZAD.
Ako výpočty ukazujú, keď priebeh zmien pozorovateľov plavidiel, uhol až 90 ° chýb v Dzad kvôli zotrvačnosti otáčania neprekračuje polomer taktického obehu. Vo veľkých uhloch sa otočí s priemerom obehu. V tejto metóde dzadnakovates marže na maximálnu možnú chybu z neprijatia cirkulácie. Táto metóda je hlavným pri otáčaní pod zadok potenciálne nebezpečnej nádoby, ktorá je paralelný alebo takmer paralelný kurz.
Účtovná zotrvačnosť, keď manévrujte rýchlosť.
Inerciálne charakteristiky a plavidlá v súlade s NSHS-82 sú predložené vo forme harmonogramu postaveného v konštantnej stupnici vzdialenosti a majú rozsah časových a rýchlostných hodnôt. Pri riešení úloh tejto kapitoly sa predpokladá, že informácie o vlastnostiach zotrvačnosti plavidla s posunom približne 10 000 ton (nádoba I) a nádobou s posunom približne 60 000 ton (nádoba II), podávaná v dodatku I .
Keď sa výmera zmení plavidlo, relatívna poloha cieľa sa presunie pozdĺž krivkovej trajektórie, ktorého zakrivenie sa postupne znižuje, pretože jeho nádoba sa uvoľní na novú pevnú rýchlosť. Chyby z neprijatia zotrvačnosti, keď rýchlosť manévrovania môže dosiahnuť niekoľko míľ odtiaľto dôležitosť účtovníctva zotrvačnosti. Keď manévrovanie, rýchlosť na veľkoplošnej plavidle, nová rýchlosť pozorovateľskej nádoby je inštalovaná prostredníctvom desiatok minút a po celú dobu, že cieľ sa pohybuje pozdĺž krivky LOD - odtiaľ zložitosti zotrvačného účtovníctva.
Účtovníctvo zotrvačnosti je možné nasledujúcimi spôsobmi.
1. Spôsob vytvorenia prieskumnej krivky.
Relatívna trajektória pohybu plavidla nájdete v konštrukcii pohyblivých trojuholníkov pre postupné časové intervaly T1, T2, ..., TN, po manévrovaní SO (Ti) \u003d SZ (Ti) - SN (TI)
Na vytvorenie krivky aldoor (obr. 6):
z miesta umiestnenia Dillí v čase začiatku manévrovania nášho plavidla stráviť cieľ priebehu kurzu a poznamenať, napríklad segmenty, ktoré sa dostali do určitých časových intervalov, napríklad každé tri minúty ( Body B1, B2, ..., BN); Z bodov BI držať čiary na boku, reverznej priebeh pozorovateľskej nádoby, a odložiť segmenty, na ktoré sa vzťahuje pozorovateľ plavidla počas príslušného času po manévrovaní (body C1, C2, ..., KN ); Prostredníctvom CI bodov na vykonanie krivky LOD a určiť DKR ako najkratšiu vzdialenosť od stredu tablety do krivky.

Dôvod je presný a vizuálny, ale intenzívny. Táto metóda rieši len úlohu predpovedať DKR NO k vybranému manévrovaniu, ale problém sa nevyrieši pri hľadaní požadovanej zmeny rýchlosti pre nezrovnalosti v danej vzdialenosti. Na riešenie problémov za podmienok mosta sa neuplatňuje. Používa sa v porovnaní s nehodami, ako aj ako odkaz na odhad správnosti približnej zotrvačnosti.
2. Spôsob zavedenia pozmeňujúcich a doplňujúcich návrhov k DZAD.
Ak je ako miera zotrvačnosti plavidla, prijať televíznu charakteristiku (inerciálna charakteristická televízia je numericky rovná rýchlosti rýchlosti polovice v Menevra Stop..GIF "Šírka \u003d" 106 "Výška \u003d" 24 SRC \u003d "\u003e , GIF "Šírka \u003d" 67 "Výška \u003d" 22 "\u003e GIF" Šírka \u003d "34" Výška \u003d "22 SRC \u003d"\u003e nepresahuje 3 kb. V tomto prípade môže byť DVAD priradený do rezervy na Maximálna možná chyba. Táto metóda môže byť hlavná pre lode s posunom na 1000 ton.
3. Spôsob podmieneného predpokladu (obr. 7)
V rovnakej dobe, nová zavedená rýchlosť rýchlosti je odložená do trojuholníka rýchlosti v trojuholníku rýchlosti, ale OLODA sa vykonáva z miesta M1 M1 Cieľ v čase začiatku manévrovania, a z podmieneného pre -mp Point M, označovaný na záhlaď vpred pre predčasný čas Tperu. V prvej aproximácii, polovica času, pre ktorú je vytvorená nová rýchlosť jeho plavidla. S metódou berúc do úvahy zotrvania je tím PROGRESS uvedený na TUPR ~ 0,5 TMMAN, ako je plavidlo, je cieľ, ktorý sa dostane do bodu, z ktorého sa starší. So správnou voľbou pokroku sa pokrok uskutoční na aktuálnej trajektórii eCHO signálu.

V tomto prípade sa metódou berúc do úvahy zotrvačnosť predpokladá, že počas ústrojenstva je udržiavaná predchádzajúca plavba plavidla (zatiaľ čo prejdená dráha je nadhodnotená), a potom, čo je nová rýchlosť VN1 okamžite nainštalovaná (súčasne cesta prešla). Ako je zrejmé z obr. 8, optimálna bude optimálna doba nárazu, v ktorej je nadhodnotenie cestovanej cesty počas TPP kompenzovaná následným podhodnotením. To zodpovedá rovnosti tieňovaných oblastí na obr. osem.

Na obr. 9 poskytuje informácie o výbere optimálneho času vykonania v závislosti od zvoleného manévrovania (VN1 / VN \u003d 0 - Stop, VN1 / VN \u003d 0,5 - MPH atď.) A charakteristiky Inertia TV. Na základe týchto informácií na začiatku letu môže byť zostavený pracovný stôl predčasného času.

Plavidlo má inerciálnu charakteristickú TV \u003d 4 a má nasledujúcu odstupňovanie sadzieb PPH 14 UZ, SPK 10 UZ, MPH 8 UZ, SMPH 5 UZ. Vykonať pracovný stôl času vykonávania.
PPH - SPX. VN1 / VN \u003d 10: 14 \u003d 0,71. Z grafu na obr. 9 TUPR / TV \u003d 0,8; TPR \u003d 0,8 * 4 \u003d 3,2 ~ 3 min. Vypočítané podobne pre VN1 / VN \u003d 0,57; 0,3; 0, dostaneme sa na manévrovanie rýchlosti rýchlosti z plného zdvihu.
SMPH, zastavte. |
|||
4. Metóda Metóda.
V tomto prípade je spôsob začatia zotrvačnosti v trojuholníku, ktorý je odložený nie je nová rýchlosť ciev, a nejaký priemer (ekvivalentná) rýchlosť počas začiatku manévrovania až do najkratšej konvergencie  Prostredníctvom koncov VCP a VC vektorov sa uskutočňuje vektor strednej relatívnej rýchlosti a olodsr sa uskutočňuje od bodu m (obr. 10). Signál ECHO sa v skutočnosti pohybuje pozdĺž krivky čiary umiestnenej medzi LOD a OLODSR Convexom v smere LOD, a v bode najkratšej konvergencie križovatiek olodárov.
Prostredníctvom koncov VCP a VC vektorov sa uskutočňuje vektor strednej relatívnej rýchlosti a olodsr sa uskutočňuje od bodu m (obr. 10). Signál ECHO sa v skutočnosti pohybuje pozdĺž krivky čiary umiestnenej medzi LOD a OLODSR Convexom v smere LOD, a v bode najkratšej konvergencie križovatiek olodárov.

V prvej aproximácii môže byť priemerný aritmetický priemer medzi starými a novými môže byť prijatý ako stredná rýchlosť.
![]()
S malým časom na najkratšiu zblíženie (), chyba nepresahuje 10% uvoľnenia lode pri voľnom brzdení.
Presnejšie, priemerná rýchlosť možno nájsť z univerzálnej zotrvačnej účtovnej tabuľky uvedenej v dodatku 2. Použitie univerzálnej účtovnej tabuľky zotrvania zotrvania z dôvodu príkladov.
Nájdite priemernú rýchlosť plavidla I počas začiatku manévrovania PPC - MPH na najkratšiu zblíženie, ak TKR \u003d 20 minút.
Z grafov brzdových ciest plavidla I (dodatok 1) pre rýchlosť 16 nájdeme TV \u003d 4 min. V univerzálnej tabuľke účtovníctva zotrvačnosti v TV \u003d 4 stĺpci nájdeme najbližší TKR \u003d 22 min a v príslušnom riadku pre reverznú 0,5 VN získavame VSR / VN \u003d 0,6. Priemerná rýchlosť môže byť odložená v trojuholníku rýchlosti okom 0,6 segmentu VN alebo, ak je to potrebné, preložte do uzlov VC \u003d 0,6 * 16 \u003d 9,6 UZ.
Podľa výsledkov radarového tesnenia sa získalo, že pre nezrovnalosti s účelom v DVAD, je potrebné mať VSR ~ 0,5VN. Oloodsr a VO WEd určovali čas od začiatku manévrovania na najkratšiu konvergenciu TKR ~ 20 min. Inerciálne vlastnosti TVP TV \u003d 8 min. Akú manévrovanú rýchlosť musí byť prijatá na rozchádzajúcu sa na Dzad?
V univerzálnej tabuľke účtovníctva zotrvačnosti v stĺpci TV \u003d 8 min nájdeme TKR \u003d 19 min a v príslušnom riadku hľadáte najbližšiu hodnotu Dolného VCR. V tomto prípade je VCR \u003d 0,5VN umiestnený v stĺpci Stop. Pre nezrovnalosti s účelom DZAD je potrebné dať "zastávku". V priľahlom stĺpci vidíme, že VT / VN \u003d 0,25, t.j. v čase, keď bude rýchlosť 0,25 VN.
Príloha 1a.
Premiestnenie plavidla I približne 10 000 ton.
https://pandia.ru/text/80/090/images/Image033_47.gif "Šírka \u003d" 423 "Výška \u003d" 442 SRC \u003d "\u003e
Dodatok 2.
Manévrovateľná tableta
prostriedky na malú mechanizáciu grafického roztoku s priamym ovládaním manévrovacích problémov. Používa sa v boji proti manévrovaním (obsadenie pozície na používanie zbraní, zblíženie s výhľadom na danú vzdialenosť, únik zo stretnutia a inej úlohy) a keď sú nezrovnalosti s súdmi v mori.
- - 1) Stravovanie Menzula, ktorá slúži ako tabuľka na čerpanie pri snímaní; 2) List papiera lepený na Menzulu, plán odnímateľnej oblasti sa aplikuje na to-RY; 3) Samostatný list topografickej karty ...
Technický železničný slovník
- - zariadenie so špeciálnym plochým povrchom a zariadením indikujúcim súradnice obrazu pre ich vstup do ...
Krátky vysvetľujúci slovník pri tlači
- - angličtina: manéruvred režim režim prevádzky elektrárne s premenlivou energiou počas nastaveného časového intervalu Zdroj: Podmienky a definície v elektrickom energetike ...
Stavebný slovník
- - manévrovateľný, oh. Manéver f. 1. rel. na manévrovanie; určené pre nich. Manévrovateľný parný lokomotív. BAS-1. 2. Vedenie bez dlhodobého opevnenia. O vojenských operáciách. Mobilné vojny. Manévrovanú obranu. Bass-1 ...
Historický slovník gallicallizmu ruského jazyka
- - Maswarm a ...
- - a ...
Orfografický slovník ruského jazyka
- -. 1. Vyrobené s používaním manévrov, bez dlhodobého opevnenia. Mobilné vojny. 2. Kuriálne rýchlo zmeniť smer pohybu. M. Cruiser. Tawared taktika. | Sud Meniaróza, -I, manželky. ...
Vysvetľujúci slovník ozhegov
-
Vysvetľujúci slovník Ushakov
- - manévrovateľný a maznáčik, manévrovateľný, manévrovateľný. Vedúci bez dlhodobého opevnenia; mravca. pozičný. Mobilné Warfare ...
Vysvetľujúci slovník Ushakov
- - manévrovateľná manévrovateľná, manuálne adj. 1. Vyrobené s používaním manévrov, bez dlhodobého opevnenia. 2. Má schopnosť manévrovať 1 ....
Vysvetľujúci slovník efremova
- - Arr. 1. Vyrobené s používaním manévrov, bez dlhodobého opevnenia. 2. Má schopnosť manévrovať. // prispievajú k rýchlej zmene smerovania pohybu. 3. predstavuje. Určené pre manévrvice ...
Vysvetľujúci slovník efremova
- - Aya, jeden. 1. armáda. S širokým používaním manévrovania bez dlhodobého opevnenia; Antip. pozičný. Mobilné Warfare ...
Malý akademický slovník
- -; stručný Form -en, -NNA a Mans "Eurahored; stručný ...
Ruská pravopisná slovník
- -; Mobilné Warfare ...
Ruský verbálny dôraz
- - ...
Tvarové slová
- - Mobile, Mobile; Otáčanie, vysoké, osviežujúce ...
Synonymný slovník
"Manéverovateľná tableta" v knihách
Manévrovateľný "Filín"
Z knihy génia "Fokke-Wulf". Veľká Kurtová tank Autor Azheliovich Leonid LipmanovichManéverable "Filín" Kurt Tank presvedčila, aby poskytla svoju inteligenciu nové meno: "Filín". Philin je v prírode väčší ako sovy a oveľa strašnejšie vtáky. Hojdačky jeho krídla presahujú jeden a pol metrov. Filíny lietajú úplne ticho, a čo je najdôležitejšie, majú jedinečné
Tableta žltá koža
Z knihy "nekryjeme o nás ..." Autor Kachaev Yuri GrigorievičŽltá kožená tableta sa vrátila domov, Nina Elistratov zistil, že Yuri, spolu s Muratom a Leva Akimovom, išiel do mesta. Syn zanechal poznámku na stole, utiekla slovami: "Od lovu príde neskoro. Nebojte sa ".like hovoria, nebojte sa, keď čoskoro a s
Katedra kúpeľne: Tablet v oblakoch
Z knihy počítača PDA N138 (01.10.2011-07.10.2011) Autor Zloženie "Computerra"Oddelenie vane: Tablet in Clouds Autor: Kúpele Mikhailopubisted Október 05, 2011. Samozrejme koncom septembra 2011, Amazon prezentoval všetkým výrobcom tabliet dobrú pilulku, alebo presnejšie, tabletu. (Ako inak by ste mali preložiť Tablet Aglitskoe?) Vo úlohe
Počítač a tablet
Z knihy sedem zručností efektívnych rodičov: riadenie rodiny, alebo ako zvládnuť všetko. Výcviková kniha Heinz MariaMyslíte si, že počítač a tablet, pochopíte, že počítače a tablety vstúpili do našich životov vážne a na dlhú dobu. Nemusíte byť záchodom, aby ste si všimli trendy v nahradení starých papierových technológií interaktívnych. Proti tomuto trendu - nestarám sa o to, čo odolať
Vysokorýchlostný manévrovateľný dvojlôžkový - Airplane Battlefield
Z knihy búrkových lietadiel červenej armády. Zväzok 1. Tvorba vzhľadu Autor Perov Vladimir IlyichVysokorýchlostný manévrovací dvojdobánk - Battlefield Lietadlo paralelne pracuje na modifikácii Serial Intelligence Lietadlá v lietadlách s ľahkým útokom a vytvorenie "vojenských lietadiel" medzi určitou časťou špecialistov s červeným armádnym letectvom získali rozsah útočnej teórie
TABLETA
Z knihy autoraPlukovník tableta pred nami je publicistické a poetické zjavenia - prevádzkové analýzy a náčrty s "Prírodou" ... Potrebujeme ich, aby pochopili našu minulosť s dnešnou skúsenosťou. Zapamätať si sami s mladými. A ďalej. Zaujímajú sa o osud autora - armády
Tableta
Z knihy Big Soviet Encyklopédia (PL) Autor BrehIFA 2010: Akonáhle tablet, dvaja Andrey Tablet písomne
Z knihy Digital Magazine "Computer" číslo 33 Autor Zloženie "Computerra"IFA 2010: Akonáhle tablet, dva tablety Andrei písomné publikované posteri písanie tabletové počítače vystavovali dlho pred Apple iPad, ale s jeho vzhľadom na svojom svete sa všetko zmenilo. Teraz pred vývojármi sa zdá, že tablet nie je
Vyberte si moderný tablet
Z knihy počítača PDA N148 (12/03 / 2011-09.12.2011) Autor Zloženie "Computerra"Vyberieme modernú tablet Poslal: Oleg Nechazubboved december 06.12.2011 Vzhľad v tablietskom trhu iPad bol splnený verejnosťou s radosťou, mnoho prekvapivo všetkých ostatných výrobcov notebookov. Faktom je, že tablety s dotykovým displejom
Katedra vane: Tablet a Desktop
Z knihy počítača PDA N137 (09/24 / 2011-30.09.2011) Autor Zloženie "Computerra"Katedra vane: Tablet a desktop Autor: Kúpele MichaelPubredked 27. septembra 2011 Leto v tlači, hlavne Severnej Ameriky, opäť boli početné prognózy pre hrobu klasického pracovného počítača. Zdvihnite K.
Z knihy autoraManévoditeľné vojnové obdobie - operácie v nemeckom rakúskom fronte: Galicia Battle a East Prusovská operácia
Z knihy autoraManévoditeľné vojnové obdobie - operácie v nemeckom rakúskom fronte: Galicia Battle a East Prusovská operácia
Z knihy autoraRiaditeľná doba vojny - operácie v nemeckom rakúskej fronte: Galicia Battle a East Prusian operácie pred prvým výletom do východného Pruska, Veľký princ Nikolai Nikolayevich vyhlásil pripravenosť začať sasť na Berlín do štyroch armády: prvé dve
Manévoditeľné vojnové obdobie - operácie v nemeckom rakúskom fronte: Galicia Battle a East Prusovská operácia
Z knihy autoraModel "Tablet"
Z knihy knihy-darček, slušná kráľovná krásy Autor Kriksunová inna AbramovnaModel tabliet je tuhý vak vo forme obdĺžnika natiahnutý vertikálne. Tabletova taška má lietajúci ventil, úplne alebo čiastočne držať vrecko, v spodnej časti tohto ventilu je upevňovací zámok. Táto modelová taška sa už dlho nosí
 Osvetľovacie zariadenia na základe striedajúcich prúdových LED diódy nájdu ich výklenok a môžu vychádzať z jeho limitov.
Osvetľovacie zariadenia na základe striedajúcich prúdových LED diódy nájdu ich výklenok a môžu vychádzať z jeho limitov.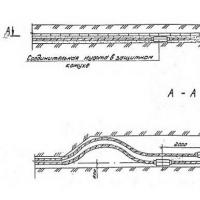 Požiadavky a sadzby pre káblové pokládky v Earth Rozsah aplikácie, definície
Požiadavky a sadzby pre káblové pokládky v Earth Rozsah aplikácie, definície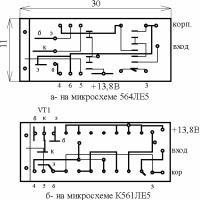 Automobilový stroboskop z laserového ukazovateľa
Automobilový stroboskop z laserového ukazovateľa Objednať 20 UAH na účet. Ako si požičať na MTS. Ďalšie informácie o službe
Objednať 20 UAH na účet. Ako si požičať na MTS. Ďalšie informácie o službe Ako skontrolovať doplnenie účtu
Ako skontrolovať doplnenie účtu Ako získať úver na Tele2?
Ako získať úver na Tele2? Odozva SSD na miniatúrnej doske Čo SSD disk kúpiť
Odozva SSD na miniatúrnej doske Čo SSD disk kúpiť