Gps vs glonass: care sistem este mai bun. Sisteme de navigație prin satelit GPS și tehnologie Glonass Glonass
Navigația prin satelit este folosită de șoferi, bicicliști, turiști – chiar și alergătorii de dimineață își urmează propriul traseu folosind sateliți. În loc să-i întrebe pe trecători cum să găsească casa potrivită, majoritatea oamenilor preferă să scoată un smartphone și să pună această întrebare GLONASS sau GPS. În ciuda faptului că modulele de navigație prin satelit sunt instalate în fiecare smartphone și în majoritatea ceasurilor sport, doar unul din zece oameni înțelege cum funcționează acest sistem și cum să-l găsească pe cel potrivit în marea dispozitivelor cu funcții GPS / GLONASS.
Cum funcționează sistemul de navigație prin satelit
Abrevierea GPS înseamnă Global Positioning System: „sistem de poziționare globală” tradus literal. Ideea de a folosi sateliți pe orbită joasă a pământului pentru a determina coordonatele obiectelor terestre a apărut în anii 1950, imediat după ce Uniunea Sovietică a lansat primul satelit artificial. Oamenii de știință americani au urmărit semnalul satelitului și au descoperit că frecvența acestuia se schimbă pe măsură ce satelitul se apropie sau se retrage. Prin urmare, cunoscându-vă coordonatele exacte pe Pământ, puteți calcula locația exactă a satelitului. Această observație a dat un impuls dezvoltării unui sistem global de coordonate.
Inițial, flota a devenit interesată de descoperire - a început dezvoltarea laboratorului naval, dar în timp s-a decis crearea sistem unificat pentru toate forțele militare. Primul satelit GPS a fost lansat pe orbită în 1978. Acum semnalele sunt transmise de aproximativ treizeci de sateliți. Când sistemul de navigație a început să funcționeze, departamentele militare americane au făcut un cadou tuturor locuitorilor planetei - au deschis accesul gratuit la sateliți, astfel încât toată lumea să poată folosi gratuit Sistemul de poziționare globală, dacă există un receptor.
În urma americanilor, Roskosmos și-a creat propriul sistem: primul satelit GLONASS a intrat pe orbită în 1982. GLONASS este un sistem global de navigație prin satelit care funcționează pe același principiu ca și cel american. Acum pe orbită există 24 de sateliți ruși care asigură coordonarea.
Pentru a utiliza unul dintre sisteme, sau mai bine două în același timp, aveți nevoie de un receptor care va primi semnale de la sateliți, precum și de un computer pentru a decoda aceste semnale: locația obiectului este calculată pe baza intervalelor dintre cele primite. semnale. Precizia calculelor este de plus sau minus 5 m.
Cu cât dispozitivul „vede” mai mulți sateliți, cu atât mai mulți mai multe informatii poate oferi. Pentru a determina coordonatele, navigatorul trebuie să vadă doar doi sateliți, dar dacă găsește cel puțin patru sateliți, dispozitivul va putea raporta, de exemplu, viteza obiectului. Prin urmare, dispozitivele moderne de navigație citesc din ce în ce mai mulți parametri:
- Coordonatele geografice ale obiectului.
- Viteza mișcării lui.
- Altitudinea deasupra nivelului mării.

Ce erori pot apărea în funcționarea GPS/GLONASS
Navigația prin satelit este bună, deoarece este disponibilă non-stop de oriunde în lume. Oriunde v-ați afla, dacă aveți un receptor, puteți determina coordonatele și puteți construi o rută. Cu toate acestea, în practică, semnalul sateliților poate fi blocat de obstacole fizice sau dezastre meteorologice: dacă conduceți printr-un tunel subteran și o furtună năvălește și de sus, este posibil ca semnalul să nu ajungă la receptor.
Această problemă a fost rezolvată datorită tehnologiei A-GPS: se presupune că receptorul folosește canale de comunicație alternative la server. Aceasta, la rândul său, utilizează datele primite de la sateliți. Datorită acestui lucru, puteți folosi sistemul de navigație în interior, în tuneluri, pe vreme rea. Tehnologia A-GPS este concepută pentru smartphone-uri și alte dispozitive personale, prin urmare, atunci când alegeți un navigator sau un smartphone, verificați dacă acesta acceptă acest standard. Așa că poți fi sigur că dispozitivul nu te va dezamăgi într-un moment crucial.
Posesorii de smartphone-uri se plâng uneori că navigatorul nu funcționează corect sau se „oprește” periodic, nu determină coordonatele. De regulă, acest lucru se datorează faptului că la majoritatea smartphone-urilor funcția GPS / GLONASS este dezactivată implicit. Dispozitivul folosește turnuri celulare sau internet wireless pentru a calcula coordonatele. Problema este rezolvată prin configurarea smartphone-ului, activând metoda dorită pentru determinarea coordonatelor. De asemenea, poate fi necesar să calibrați busola sau să vă resetați navigatorul.

Tipuri de navigatori
- Automobile. Un sistem de navigație legat de sateliții GLONASS sau de omologii lor americani poate face parte din computerul de bord al unei mașini, dar mai des sunt cumpărate dispozitive separate. Ele nu numai că determină coordonatele mașinii și vă permit să ajungeți cu ușurință de la punctul A la punctul B, dar și vă protejează împotriva furtului. Chiar dacă intrușii fură o mașină, aceasta poate fi urmărită de un far. Avantajul dispozitivelor speciale pentru mașini este că prevăd instalarea unei antene - datorită antenei, puteți amplifica semnalul GLONASS.
- Turist. Dacă un set special de hărți poate fi instalat într-un navigator de mașină, atunci se impun cerințe mai stricte pentru dispozitivele de călătorie: modelele moderne permit utilizarea unui set extins de hărți. Cu toate acestea, cel mai simplu dispozitiv de călătorie este doar un receptor de semnal cu un simplu computer. El poate nici măcar să nu marcheze coordonatele pe hartă și atunci ar fi necesară o hartă de hârtie cu o grilă de navigare. Cu toate acestea, acum astfel de dispozitive sunt cumpărate doar din motive de economie.
- Smartphone-uri, tablete cu receptor GPS/GLONASS. Smartphone-urile vă permit, de asemenea, să descărcați un set extins de hărți. Ele pot fi folosite ca navigatoare pentru mașini și călătorii, principalul lucru este să instalați aplicația și să descărcați hărțile necesare. Multe dintre programele de navigare utile sunt gratuite, dar unele vin cu un preț mic.

Software de navigare pentru smartphone-uri
Una dintre cele mai programe simple conceput pentru cei care nu doresc să se adâncească în funcționalitatea: MapsWithMe. Vă permite să descărcați o hartă a regiunii dorite din rețea pentru a o utiliza ulterior, chiar dacă nu există conexiune la Internet. Programul va arăta locația pe hartă, va găsi obiectele marcate pe această hartă - acestea pot fi salvate în marcaje și apoi utilizați o căutare rapidă. Acesta este sfârșitul funcționalității. Programul folosește doar hărți vectoriale - alte formate nu pot fi încărcate.
Proprietarii de dispozitive Android pot folosi programul OsmAnd. Este potrivit pentru șoferi și drumeții, deoarece vă permite să planificați automat un traseu de-a lungul drumurilor sau potecilor montane. Navigatorul GLONASS vă va ghida pe traseu comenzi vocale... Pe lângă hărțile vectoriale, puteți utiliza hărți raster, precum și să marcați puncte de referință și să înregistrați trasee.
Cea mai apropiată alternativă la OsmAnd este aplicația Locus Map. Este potrivit pentru drumeții, deoarece seamănă cu dispozitivul clasic de navigație turistică care era folosit înainte de apariția smartphone-urilor. Utilizează atât hărți vectoriale, cât și hărți raster.

Dispozitive turistice
Smartphone-urile și tabletele pot înlocui un dispozitiv GPS/GLONASS dedicat turismului, dar această soluție are dezavantajele ei. Pe de o parte, dacă aveți un smartphone, nu trebuie să cumpărați niciun dispozitiv suplimentar. Este ușor să lucrați cu harta pe ecranul mare luminos, alegerea aplicațiilor este largă - am indicat doar câteva programe, este imposibil să acoperim toate propunerile. Dar smartphone-ul are și dezavantaje:
- Se descarcă rapid. În medie, dispozitivul funcționează timp de o zi și cu atât mai puțin în modul de căutare constantă a coordonatelor.
- Necesită o manipulare atentă. Desigur, există smartphone-uri securizate, dar pe lângă faptul că sunt scumpe, fiabilitatea unui astfel de smartphone încă nu poate fi comparată cu un dispozitiv turistic special GLONASS. Poate fi complet impermeabil.
Pentru drumețiile de mai multe zile în sălbăticie au fost dezvoltate dispozitive specializate, în carcase impermeabile și cu baterii puternice. Cu toate acestea, atunci când alegeți un astfel de dispozitiv, este important să clarificați că acesta acceptă atât hărți vectoriale, cât și hărți raster. O hartă raster este o imagine ancorată la coordonate. Puteți lua o hartă pe hârtie, o scanați, o puteți conecta la coordonatele GLONASS - și obțineți o hartă raster. Hărțile vectoriale nu sunt o imagine, ci un set de obiecte pe care programul le plasează pe imagine. Sistemul vă permite să începeți o căutare după obiecte, dar este dificil să creați o astfel de schemă pe cont propriu.
Astăzi este greu de găsit un domeniu de dezvoltare socio-economică în care serviciile de navigație prin satelit să nu poată fi utilizate. Cea mai urgentă este utilizarea tehnologiilor GLONASS în industria transporturilor, inclusiv transportul maritim și fluvial, transportul aerian și terestru. În același timp, conform experților, aproximativ 80% din echipamentele de navigație sunt folosite în transportul rutier.
TRANSPORT TERESTRU
![]()
Unul dintre principalele domenii de aplicare a navigației prin satelit este monitorizarea vehiculelor. Acest serviciu este cel mai important pentru companiile industriale, de construcții, de transport. Echipamentul de navigație care primește semnale de la sistemul GLONASS face posibilă determinarea locației vehiculului, citirile senzorilor de măsurare pot asigura atât siguranța transportului de pasageri, cât și confortul și optimizarea funcționării vehiculelor comerciale și excluderea inadecvată a acestuia. utilizare. Implementarea sistemului permite proprietarilor de flote de vehicule să-și reducă costurile de întreținere cu 20-30% în 4-6 luni.
Una dintre tehnologiile implementate în Rusia pe baza navigației prin satelit este Intelligent Transport System (ITS). Include monitorizarea transportului mărfurilor periculoase, supradimensionate și grele, monitorizarea regimului de muncă și odihnă al șoferilor, gestionarea și dispecerizarea traficului de pasageri, informarea călătorilor cu privire la transportul urban.
Eficacitatea utilizării serviciilor de navigație prin satelit în transportul terestru poate fi evaluată prin criterii precum:
- reducerea numărului de accidente rutiere, precum și a numărului de decese și răniți în accidente rutiere, reducerea timpului de răspuns la accidentele rutiere;
- reducerea timpului de călătorie, creșterea atractivității transportului public;
- îmbunătățirea calității cheltuirii fondurilor bugetare.
Potrivit experților, datorită introducerii sistemelor de transport inteligente, PIB-ul Rusiei poate crește cu 4-5% pe an.
Transport municipal și public din Altai, Krasnodar, Krasnoyarsk, Stavropol, teritoriile Khabarovsk, Astrakhan, Belgorod, Vologda, Kaluga, Kurgan, Magadan, Moscova, Nijni Novgorod, Novosibirsk, Penza, Saratov, Tambov, Regiunile Tyumen, Republica Moscova, Mordovia, Tatarstan, Chuvahia. În Rusia în ansamblu, elementele ITS au fost implementate și funcționează eficient în peste 100 de orașe.
CAUTA SI SALVEAZA

Echipamentele care primesc semnale de la sateliții de navigație sunt instalate pe vehiculele de ambulanță îngrijire medicală, precum și autovehicule ale Ministerului Situațiilor de Urgență. Asistența coordonată și temporară bazată pe date satelitare permite echipelor medicale și salvatorilor să ajungă mai rapid la locurile de urgență pentru a oferi asistență victimelor. Cu ajutorul GLONASS, se urmărește locația și mișcarea grupurilor de pompieri.
Unul dintre exemplele ilustrative de utilizare a navigației globale prin satelit în interesul salvării de vieți omenești este sistemul ERA-GLONASS (răspuns de urgență în caz de accidente). Sarcina sa principală este de a determina faptul unui accident de trafic și de a transfera date către serverul de răspuns. În cazul unui accident de mașină, terminalul de navigație și telecomunicații instalat pe acesta determină automat coordonatele, stabilește comunicarea cu centrul server al sistemului de monitorizare și transmite datele despre accident prin canale. celular operator. Aceste date fac posibilă determinarea naturii și gravitatea unui accident și efectuarea unui răspuns imediat de către ambulanțe. Utilizarea datelor din Sistemul global de navigație prin satelit prin ERA-GLONASS poate reduce semnificativ rata deceselor din cauza rănilor rezultate în urma accidentelor rutiere.
Un alt domeniu de aplicare GLONASS în interesul salvării de vieți omenești este combinarea navigației globale prin satelit cu sistemul internațional de căutare și salvare COSPAS-SARSAT. Această funcție este furnizată pe nava spațială de navigație de ultimă generație „Glonass-K”. Deja în stadiul testelor de zbor, satelitul Glonass-K nr. 11 în martie 2012 a transmis un semnal de primejdie despre elicopterul canadian prăbușit prin repetorul acestui sistem, datorită căruia echipajul a fost salvat.
NAVIGARE PERSONALĂ

Chipset-urile cu receptoare de navigație ale semnalelor GLONASS sunt utilizate în smartphone-uri, tablete, camere digitale, dispozitive de fitness, trackere purtabile, computere laptop, navigatoare, ceasuri, ochelari și alte dispozitive. Navigația personală devine principala zonă de aplicare a tehnologiilor de navigație prin satelit.
Utilizarea tehnologiilor GNSS a contribuit la apariția unor sporturi și activități în aer liber complet noi. Un exemplu în acest sens este geocaching - un joc turistic care utilizează sisteme de navigație prin satelit, al cărui scop este găsirea cache-urilor ascunse de alți participanți la joc. Un alt sport nou de geoetichetare este cursele de fond la coordonatele satelitului predeterminate.
O zonă promițătoare de aplicare a tehnologiilor GLONASS este sistemele sociale acordarea de asistență persoanelor cu dizabilități sau copiilor mici. Folosind echipamente de navigație cu interfață vocală, o persoană nevăzătoare își poate determina drumul către un magazin, clinică etc. Posesorii unor astfel de dispozitive pot, în caz de pericol sau de deteriorare bruscă a sănătății, să apeleze asistența de urgență prin apăsarea butonului de panică. Un tracker individual prin satelit poate ajuta părinții să urmărească locația copilului lor online pentru a le monitoriza siguranța.
AVIAŢIE

În aviație, receptoarele de navigație sunt integrate în sistemele de sprijin pentru navigația aeriană de la bord care asigură navigarea pe rută și abordări de aterizare în condiții meteorologice dificile. Navigația prin satelit este de mare importanță pentru aterizarea aeronavelor mici pe aerodromuri neechipate. Sistemele de navigație bazate pe GLONASS măresc siguranța navigației cu elicopterul, măresc precizia de navigare a vehiculelor aeriene fără pilot.
TRANSPORT CU APĂ

Utilizarea tehnologiilor GNSS pentru utilizarea marină / fluvială în Rusia tinde să fie de 100%. Capacitatea pieței ruse este estimată la 18.560 de unități de transport pe apă, inclusiv vase fluviale și maritime de marfă și pasageri. Tehnologiile GLONASS sunt utilizate în navigație pentru pilotaj și manevre în condiții dificile (ecluze, porturi, canale, strâmtori, condiții de gheață), navigație pe căi navigabile interioare, monitorizare și contabilitate a flotei și operațiuni de salvare.
Creșterea volumului de trafic de-a lungul Rutei Mării Nordului, care poate reduce semnificativ timpul de livrare a mărfurilor din regiunea Asia-Pacific către Europa, duce la creșterea intensității transportului maritim într-o zonă cu condiții climatice extrem de dure. În condiții de furtună și ceață densă, este dificil să se asigure siguranța traficului navelor fără navigație prin satelit.
GEODEZIE ȘI CARTOGRAFIE

Tehnologiile GLONASS sunt utilizate în cadastrul orașului și funciar, planificarea și managementul dezvoltării teritoriilor, pentru actualizarea hărților topografice. Utilizarea tehnologiilor GLONASS accelerează și reduce costul procesului de creare a hărților și de actualizare a acestora - în unele cazuri, nu este nevoie de fotografiere aeriană costisitoare sau de un studiu topografic laborios. V Federația Rusă volumul actual al pieței de echipamente geodezice bazate pe GNSS este estimat la 2,3 mii unități.
MEDIU INCONJURATOR

Comunitatea științifică folosește în mod activ datele de navigație pentru observații și studii ale Pământului. GLONASS contribuie la dezvoltarea metodelor și instrumentelor destinate rezolvării problemelor fundamentale ale geodinamicii, formarea sistemului de coordonate al Pământului, construirea unui model al Pământului, măsurarea mareelor, curenților și nivelul mării, determinarea și sincronizarea timpului, localizarea scurgerilor de petrol, recuperarea terenurilor după aruncarea deșeurilor periculoase.
Semnalele de navigație de la sonda spațială GLONASS joacă un rol important în studiul proceselor seismice. Cu ajutorul datelor satelitare, mai precis decât prin echipamente terestre, este posibil să se înregistreze procesele de deplasare a plăcilor tectonice. În plus, perturbațiile ionosferei înregistrate de sateliții de navigație oferă oamenilor de știință date despre mișcările care se apropie ale scoarței terestre. Astfel, navigația globală prin satelit face posibilă prezicerea cutremurelor și minimizarea consecințelor acestora pentru oameni. Tehnologiile GLONASS ajută, de asemenea, la monitorizarea drumurilor și căilor ferate în zonele predispuse la avalanșe din zonele muntoase.
NAVIGARE SPATIALA

În industria spațială, tehnologiile GLONASS sunt utilizate pentru urmărirea vehiculelor de lansare, determinarea de înaltă precizie a orbitelor navelor spațiale, determinarea orientării navei spațiale față de Soare, pentru observarea precisă, controlul și desemnarea țintei sistemelor de apărare antirachetă.
În special, echipamentul de navigație prin satelit GLONASS sau GLONASS / GPS este echipat cu vehiculul de lansare Proton-M, vehiculul de lansare Soyuz, treptele superioare Breeze, Fregat, DM și sonda spațială Meteor-M, "Ionosphere", "Kanopus-ST". ”, „Kondor-E”, „Bars-M”, „Lomonosov”, precum și complexe feroviare mobile utilizate pentru transportul rachetelor de transport și componentelor de propulsie.
În industria spațială un numar mare de proiectele necesită cunoștințe de înaltă precizie a orbitelor navelor spațiale în rezolvarea problemelor de teledetecție a Pământului, recunoaștere, cartografiere, monitorizare a gheții, situații de urgență, precum și în domeniul studierii Pământului și oceanelor lumii, construirea unei dinamici de înaltă precizie. modelul geoidului, modele dinamice de înaltă precizie ale ionosferei și atmosferei. În același timp, acuratețea cunoașterii poziției obiectelor este necesară la nivelul unităților de centimetri; metode speciale de procesare a măsurătorilor sistemului GLONASS de la receptoarele amplasate la bordul navei spațiale fac posibilă rezolvarea cu succes a acestei probleme. .
CONSTRUCTIE

În Rusia, tehnologiile GLONASS sunt utilizate pentru monitorizarea echipamentelor de construcții, precum și pentru monitorizarea deplasării carosabilului, monitorizarea deformațiilor obiectelor liniare staționare, în sistemele de control pentru echipamentele de construcție a drumurilor.
Serviciile de navigație prin satelit ajută la determinarea locației obiectelor geografice cu precizie centimetrică atunci când se instalează conducte de petrol și gaze, linii electrice, pentru a clarifica parametrii terenului în timpul construcției de clădiri și structuri, construcție de drumuri. Potrivit experților autohtoni și străini, utilizarea GLONASS crește eficiența lucrărilor de construcție și cadastrală cu 30-40%.
Utilizarea serviciilor GLONASS vă permite să transferați rapid informații despre starea structurilor complexe de inginerie, a obiectelor potențial periculoase, cum ar fi baraje, poduri, tuneluri, întreprinderi industriale, centrale nucleare. Cu ajutorul monitorizării prin satelit, specialiștii primesc informații în timp util despre necesitatea diagnosticării suplimentare a acestor structuri și repararea acestora.
SISTEME DE COMUNICARE
GLONASS este utilizat pentru înregistrarea temporară a tranzacțiilor monetare în tranzacții cu acțiuni, valută și mărfuri. O modalitate continuă și precisă de înregistrare a transferurilor și capacitatea de a le urmări este coloana vertebrală a activităților sistemelor internaționale de tranzacționare pentru tranzacționarea interbancară. Cele mai mari bănci de investiții folosesc GLONASS pentru a sincroniza rețelele de calculatoare ale diviziilor lor din toată Rusia. United Exchange MICEX-RTS folosește semnale GLONASS temporare pentru înregistrarea corectă a cotațiilor atunci când efectuează tranzacții. Echipamentele GLONASS, utilizate în interesul infrastructurii de telecomunicații, oferă o soluție la problemele de sincronizare a rețelelor de comunicații.
ARMĂ

Sistemul GLONASS este de o importanță deosebită pentru rezolvarea eficientă a sarcinilor de către Forțele Armate și consumatorii speciali. Sistemul este utilizat pentru a rezolva sarcinile de sprijin în coordonate în timp ale tuturor tipurilor și ramurilor de trupe, inclusiv pentru a crește eficiența utilizării armelor de înaltă precizie, a aeronavelor fără pilot și a comenzii și controlului operațional al trupelor.
Sistemul GLONASS este cel mai mare sistem de navigație care vă permite să urmăriți locația diferitelor obiecte. Proiectul, lansat în 1982, se dezvoltă și se îmbunătățește activ până în prezent. Mai mult decât atât, se lucrează atât la suportul tehnic al GLONASS, cât și la infrastructura care permite ca sistemul să fie utilizat în totalitate. Mai mult al oamenilor. Așadar, dacă în primii ani de existență ai complexului, navigația prin sateliți a fost folosită mai ales în rezolvarea problemelor militare, astăzi GLONASS este un instrument tehnologic de poziționare devenit obligatoriu în viața a milioane de utilizatori civili.
Sisteme globale de navigație prin satelit
Datorită complexității tehnologice a poziționării globale prin satelit, astăzi doar două sisteme pot corespunde pe deplin acestui nume - GLONASS și GPS. Primul este rus, iar al doilea este rodul dezvoltatorilor americani. Din punct de vedere tehnic, GLONASS este un complex de echipamente hardware specializate situate atât pe orbită, cât și pe sol.
Pentru comunicarea cu sateliții, se folosesc senzori și receptoare speciali care citesc semnalele și formează date de locație pe baza acestora. Pentru calcularea parametrilor de timp se folosesc alții speciali, care sunt utilizați pentru a determina poziția obiectului, ținând cont de difuzarea și procesarea undelor radio. Reducerea erorilor permite un calcul mai fiabil al parametrilor de poziționare.
Caracteristici de navigare prin satelit

Gama de sarcini ale sistemelor globale de navigație prin satelit include determinarea locației exacte a obiectelor terestre. Pe lângă locația geografică, sistemele globale de navigație prin satelit permit luarea în considerare a timpului, rutei, vitezei și a altor parametri. Aceste sarcini sunt realizate cu ajutorul sateliților situati în diferite puncte deasupra suprafeței pământului.
Utilizarea navigației globale nu se limitează la industria transporturilor. Sateliții ajută la operațiunile de căutare și salvare, geodezică și lucrări de construcție, iar coordonarea și întreținerea altor stații și vehicule spațiale nu se pot descurca fără ei. Nici industria militară nu este lăsată fără sprijinul unui sistem de ținte similare, oferind un semnal protejat conceput special pentru echipamentele autorizate de la Departamentul Apărării.
sistem GLONASS
Sistemul a început să funcționeze pe deplin abia în 2010, deși încercările de a aduce complexul în funcțiune au fost făcute încă din 1995. În multe privințe, problemele au fost asociate cu durabilitatea scăzută a sateliților utilizați.
În acest moment, GLONASS are 24 de sateliți care operează în diferite puncte ale orbitei. În general, infrastructura de navigație poate fi reprezentată de trei componente: complexul de control (oferă controlul constelației pe orbită), precum și navigația. mijloace tehnice utilizatorii.

Cei 24 de sateliți, fiecare cu altitudinea sa constantă, sunt împărțiți în mai multe categorii. Există 12 sateliți pe emisferă. Folosind orbitele satelitului deasupra suprafeței pământului, se formează o grilă, datorită semnalelor cărora se determină coordonatele exacte. În plus, satelitul GLONASS are mai multe facilități de rezervă. De asemenea, sunt fiecare pe orbită proprie și nu sunt inactivi. Sarcinile lor includ extinderea acoperirii într-o anumită regiune și înlocuirea sateliților defectați.
sistem GPS
Analogul american al GLONASS este sistemul GPS, care și-a început activitatea în anii 1980, dar abia din 2000, precizia determinării coordonatelor a făcut posibilă utilizare largă printre consumatori. Azi sateliți gps garantează o precizie de până la 2-3 m. Întârziere în dezvoltarea capacităților de navigație perioadă lungă de timp s-a datorat restricțiilor de poziționare artificială. Cu toate acestea, eliminarea lor a făcut posibilă determinarea coordonatelor cu acuratețe maximă. Chiar și în condiția sincronizării cu receptoare miniaturale, se obține un rezultat corespunzător GLONASS.
Diferențele dintre GLONASS și GPS

Există mai multe diferențe între sistemele de navigație. În special, există o diferență în natura plasării și mișcării sateliților pe orbite. În complexul GLONASS, se deplasează de-a lungul a trei planuri (opt sateliți pentru fiecare), iar sistemul GPS asigură lucrul în șase planuri (aproximativ patru pe avion). Astfel, sistemul rusesc asigură o acoperire mai largă a teritoriului terestru, ceea ce se reflectă într-o precizie mai mare. Cu toate acestea, în practică, „viața” pe termen scurt a sateliților autohtoni nu permite utilizarea întregului potențial al sistemului GLONASS. GPS-ul, la rândul său, menține o precizie ridicată datorită unui exces de sateliți. Cu toate acestea, complexul rus introduce în mod regulat noi sateliți, atât pentru utilizare țintită, cât și ca suport de rezervă.
Aplica de asemenea metode diferite codificarea semnalului - americanii folosesc codul CDMA, iar în GLONASS - FDMA. La calcularea datelor pentru poziționarea de către receptori, sistemul rusesc prin satelit oferă un model mai complex. Ca urmare, utilizarea GLONASS necesită un consum mare de energie, care se reflectă în dimensiunile dispozitivelor.
Ce permit capabilitățile GLONASS?

Printre sarcinile de bază ale sistemului este de a determina coordonatele unui obiect capabil să interacționeze cu GLONASS. GPS în acest sens îndeplinește sarcini similare. În special, se calculează parametrii mișcării obiectelor terestre, maritime și aeriene. În câteva secunde, un vehicul prevăzut cu un navigator adecvat poate calcula caracteristicile propriei mișcări.
În același timp, utilizarea navigației globale a devenit deja obligatorie pentru anumite categorii de transport. Dacă în anii 2000 răspândirea poziționării prin satelit era legată de controlul anumitor obiecte strategice, atunci astăzi navele și aeronavele, transportul public etc. sunt furnizate cu receptori.În viitorul apropiat, este posibil ca toate mașinile private să fie prevăzute cu navigatori GLONASS.
Ce dispozitive funcționează cu GLONASS
Sistemul este capabil să ofere un serviciu global continuu tuturor categoriilor de consumatori fără excepție, indiferent de condițiile climatice, teritoriale și de timp. Ca și serviciile sistemului GPS, navigatorul GLONASS este oferit gratuit oriunde în lume.
Printre dispozitivele care au capacitatea de a recepționa semnale prin satelit, există nu numai ajutoare de navigare la bord și receptoare GPS, ci și Telefoane mobile... Datele privind locația, direcția și viteza de deplasare sunt trimise către un server special prin rețelele operatorilor GSM. Ajută la utilizarea capacităților de navigație prin satelit program special GLONASS și diverse aplicații care se ocupă de procesarea hărților.
Receptoare combinate

Extinderea teritorială a navigației prin satelit a dus la comasarea celor două sisteme din punctul de vedere al consumatorului. În practică, dispozitivele GLONASS sunt adesea suplimentate cu GPS și invers, ceea ce îmbunătățește precizia poziționării și parametrii de sincronizare. Din punct de vedere tehnic, acest lucru se realizează prin doi senzori integrați într-un singur navigator. Pe baza acestei idei, sunt produse receptoare combinate care funcționează simultan cu GLONASS, GPS și echipamente aferente.
Pe lângă îmbunătățirea acurateței determinării, o astfel de simbioză face posibilă urmărirea locației atunci când sateliții unuia dintre sisteme nu sunt capturați. Numărul minim de obiecte orbitale, a căror „vizibilitate” este necesară pentru ca navigatorul să funcționeze, este de trei unități. Deci, dacă, de exemplu, programul GLONASS devine indisponibil, atunci sateliții GPS vor veni în ajutor.
Alte sisteme de navigație prin satelit

Uniunea Europeană, precum și India și China dezvoltă proiecte similare ca amploare cu GLONASS și GPS. intenționează să implementeze sistemul Galileo, format din 30 de sateliți, care va atinge o precizie de neegalat. India intenționează să lanseze sistemul IRNSS folosind șapte sateliți. Complexul de navigație este orientat spre uz casnic. Sistemul de busolă de la dezvoltatorii chinezi ar trebui să fie format din două segmente. Primul va include 5 sateliți, iar al doilea - 30. În consecință, autorii proiectului presupun două formate de servicii.
Sisteme de navigație prin satelit GLONASS și GPS. Partea 1
E. Povalyaev, S. Khutornaya
Sisteme de navigație prin satelit GLONASS și GPS. Partea 1
Vă aducem în atenție o serie de articole dedicate sistemelor de radionavigație prin satelit Glonass (sistem global de navigație prin satelit) și GPS (Global Positioning System). Primul articol al ciclului discută problemele construcției și funcționării sistemelor, structura și funcțiile echipamentelor de consum (receptoare), algoritmi pentru rezolvarea problemei de navigație și perspectivele de dezvoltare a sistemelor.
Din cele mai vechi timpuri, călătorii s-au întrebat: cum să-și determine locația pe Pământ? Navigatorii antici erau ghidați de stelele care indicau direcția de mișcare: cunoscând viteza medie și timpul de călătorie, era posibil să se navigheze în spațiu și să se determine distanța până la destinația finală. Cu toate acestea, condițiile meteorologice nu au jucat întotdeauna în mâinile cercetătorilor, așa că nu a fost dificil să se îndepărteze de curs. Odată cu apariția busolei, sarcina a devenit mult mai ușoară. Călătorul era deja mai puțin dependent de vreme.
Era radioului a deschis noi posibilități pentru om. Odată cu apariția lui stații radar Când a devenit posibilă măsurarea parametrilor mișcării și a locației relative a unui obiect de către fasciculul radar reflectat de suprafața acestuia, a apărut întrebarea despre posibilitatea de a măsura parametrii mișcării obiectului prin semnalul emis. În 1957, în URSS, un grup de oameni de știință condus de V.A. Kotelnikova a confirmat experimental posibilitatea de a determina parametrii de mișcare ai unui satelit artificial de Pământ (AES) pe baza rezultatelor măsurătorilor deplasării de frecvență Doppler a semnalului emis de acest satelit. Dar, cel mai important, a fost stabilită posibilitatea rezolvării problemei inverse - găsirea coordonatelor receptorului din deplasarea Doppler măsurată a semnalului emis de satelit, dacă sunt cunoscuți parametrii de mișcare și coordonatele acestui satelit. Când se deplasează pe orbită, satelitul emite un semnal o anumită frecvență, a cărui denumire este cunoscută pe partea de primire (consumator). Poziția satelitului în fiecare moment de timp este cunoscută, mai precis, poate fi calculată pe baza informațiilor stocate în semnalul satelitului. Utilizatorul, măsurând frecvența semnalului care a venit la el, îl compară cu referința și calculează astfel deplasarea de frecvență Doppler datorită mișcării satelitului. Măsurătorile se fac continuu, ceea ce vă permite să compuneți un fel de funcție de schimbare a frecvenței Doppler. La un anumit moment în timp, frecvența devine egală cu zero și apoi își schimbă semnul. În momentul în care frecvența Doppler este egală cu zero, consumatorul se află pe linie, care este normala vectorului de mișcare al satelitului. Folosind dependența pantei curbei de frecvență Doppler de distanța dintre consumator și satelit și măsurând momentul în care frecvența Doppler este egală cu zero, se pot calcula coordonatele consumatorului.
Astfel, satelitul artificial Pământului devine o stație de referință pentru radionavigație, ale cărei coordonate se modifică în timp datorită mișcării satelitului pe orbită, dar poate fi calculată în avans pentru orice moment din timp datorită informațiilor efemeride încorporate în satelit. semnal de navigație.
În 1958-1959. la Academia de Inginerie a Forțelor Aeriene din Leningrad (LVVIA) ei. A.F. Mozhaisky, Institutul de Astronomie Teoretică al Academiei de Științe a URSS, Institutul de Electromecanică al Academiei de Științe URSS, două institute de cercetare științifică marine și Institutul de Cercetare Științifică de Cercetare și Dezvoltare Gorki au efectuat cercetări pe tema „Sputnik”, care mai târziu a devenit baza pentru construcția primului sistem intern de navigație prin satelit pe orbită joasă „Tsikada”. Și în 1963, au început lucrările pentru construirea acestui sistem. În 1967, primul satelit intern de navigație, Kosmos-192, a fost lansat pe orbită. O trăsătură caracteristică a sistemelor de radionavigație prin satelit de prima generație este utilizarea sateliților pe orbită joasă și utilizarea unui semnal de la un satelit vizibil în acest moment pentru a măsura parametrii de navigație ai unui obiect. Ulterior, sateliții sistemului „Tsikada” au fost echipați cu echipamente de recepție pentru detectarea obiectelor aflate în primejdie.
În paralel cu aceasta, după lansarea cu succes a primului satelit artificial de pământ de către URSS, în SUA la Laboratorul de Fizică Aplicată de la Universitatea Johns Hopkins, se lucrează în legătură cu posibilitatea de măsurare a parametrilor semnalului emis. prin satelit. Măsurătorile sunt utilizate pentru a calcula parametrii mișcării satelitului în raport cu punctul de observare la sol. Rezolvarea problemei inverse este o chestiune de timp.
Pe baza acestor studii, în 1964, în Statele Unite, a creat sistemul de radionavigație prin satelit Doppler de prima generație „Transit”. Scopul său principal este de a oferi suport de navigație pentru lansarea rachetelor balistice Polaris din submarine. Directorul Laboratorului de Fizică Aplicată, R. Kershner, este considerat părintele sistemului. Sistemul a devenit disponibil pentru utilizare comercială în 1967. La fel ca în sistemul Tsikada, în sistemul Tranzit, coordonatele sursei sunt calculate din deplasarea Doppler a frecvenței semnalului unuia dintre cei 7 sateliți vizibili. Sistemele AES au orbite polare circulare cu o altitudine de ~ 1100 km deasupra suprafeței Pământului, perioada orbitală a sateliților „Tranzit” este de 107 minute. Precizia calculării coordonatelor sursei în sistemele de prima generație depinde în mare măsură de eroarea în determinarea vitezei sursei. Deci, dacă viteza obiectului este determinată cu o eroare de 0,5 m, atunci aceasta, la rândul său, va duce la o eroare în determinarea coordonatelor de ~ 500 m. Pentru un obiect staționar, această valoare scade la 50 m.
În plus, funcționarea continuă nu este posibilă în aceste sisteme. Datorită faptului că sistemele sunt pe orbită joasă, timpul în care satelitul se află în câmpul vizual al utilizatorului nu depășește o oră. În plus, timpul dintre trecerea diferiților sateliți din zona de vizibilitate a consumatorului depinde de latitudinea geografică la care se află și poate varia de la 35 la 90 de minute. Reducerea acestui interval prin creșterea numărului de sateliți este imposibilă, deoarece toți sateliții emit semnale la aceeași frecvență.
În consecință, sistemele de navigație prin satelit de a doua generație prezintă o serie de dezavantaje semnificative. În primul rând, nu există o acuratețe insuficientă în determinarea coordonatelor obiectelor dinamice. Un alt dezavantaj este lipsa continuității măsurătorilor.
Una dintre principalele probleme apărute în dezvoltarea sistemelor de satelit care oferă definiții de navigație pentru mai mulți sateliți este sincronizarea reciprocă a semnalelor (scalele de timp) ale sateliților cu precizia necesară. O nepotrivire a generatoarelor de referință prin satelit cu 10 ns duce la o eroare în determinarea coordonatelor consumatorului 10-15 m. A doua problemă cu care s-au confruntat dezvoltatorii la crearea sistemelor de navigație prin satelit pe orbită înaltă a fost determinarea și predicția de înaltă precizie a parametrilor orbitelor satelitului. Echipamentul receptor, prin măsurarea întârzierilor semnalelor de la diferiți sateliți, calculează coordonatele consumatorului.
În aceste scopuri, în 1967, Marina SUA a dezvoltat un program conform căruia a fost lansat satelitul TIMATION-I, iar în 1969 - satelitul TIMATION-II. La bord au fost folosiți acești sateliți oscilatoare cu cristale... În același timp, Forțele Aeriene ale SUA rula programul său paralel pentru a utiliza semnale de pseudo-zgomot de bandă largă (PRN). Proprietățile de corelare ale unui astfel de cod fac posibilă utilizarea unei frecvențe de semnal pentru toți sateliții, cu divizarea codului a semnalelor de la diferiți sateliți. Mai târziu, în 1973, cele două programe au fost fuzionate într-unul comun sub numele „Navstar-GPS”. Până în 1996, implementarea sistemului a fost finalizată. În prezent, sunt disponibili 28 de sateliți activi.
În URSS, testele de zbor ale sistemului de navigație prin satelit GLONASS pe orbită înaltă au început în 1982 odată cu lansarea satelitului Kosmos-1413. Principalul dezvoltator și creator pentru sistem în ansamblu și pentru segmentul spațial este NPO Applied Mechanics (Krasnoyarsk), iar pentru nave spațiale de navigație - PO Polet (Omsk). RNIIKP este dezvoltatorul principal al complexelor de inginerie radio; Institutul Rus de Radio Navigație și Timp a fost numit responsabil pentru crearea complexului temporar, a sistemului de sincronizare și a echipamentelor de navigație pentru consumatori.
Sistem de radionavigație prin satelit de rețea (SRNSS) Glonass
Sistemul Glonass este destinat navigației operaționale globale a obiectelor mobile de suprafață. SRNSS a fost elaborat prin ordin al Ministerului Apărării. Prin structura sa, Glonass, la fel ca GPS-ul, este considerat un sistem cu acțiune dublă, adică poate fi folosit atât în scopuri militare, cât și în scopuri civile.
Sistemul în ansamblu include trei părți funcționale (în literatura de specialitate, aceste părți sunt numite segmente) (Fig. 1).
Figura 1. Segmente ale sistemelor de navigație pe orbită înaltă Glonass și GPS
- segment spațial, care include o constelație orbitală de sateliți artificiali de pământ (cu alte cuvinte, nave spațiale de navigație);
- segment de control, complex de control la sol (GCC) al constelației orbitale a navelor spațiale;
- echipamentele utilizatorilor sistemului.
Dintre aceste trei părți, ultima, echipamentul utilizatorului, este cea mai numeroasă. Sistemul Glonass nu este solicitant, deci numărul de utilizatori ai sistemului nu contează. Pe lângă funcția principală - definițiile de navigație - sistemul permite sincronizarea reciprocă de înaltă precizie a standardelor de frecvență și timp la obiecte terestre aflate la distanță și referire geodezică reciprocă. În plus, poate fi folosit pentru a determina orientarea unui obiect pe baza măsurătorilor efectuate de la patru receptoare de semnale ale sateliților de navigație.
În sistemul Glonass, navele spațiale de navigație (NSA), care se rotesc pe o orbită geostaționară circulară la o altitudine de ~ 19100 km, sunt folosite ca stație de referință pentru navigație radio (Fig. 2). Perioada de revoluție a satelitului în jurul Pământului este, în medie, de 11 ore și 45 de minute. Durata de funcționare a satelitului este de 5 ani, timp în care parametrii orbitei sale nu ar trebui să difere de valorile nominale cu mai mult de 5%. Satelitul în sine este un container etanș cu un diametru de 1,35 m și o lungime de 7,84 m, în interiorul căruia sunt amplasate diverse tipuri de echipamente. Toate sistemele sunt alimentate de panouri solare. Masa totală a satelitului este de 1415 kg. Echipamentul de bord include: un transmițător de navigație la bord, un cronizor (ceas), un complex de control la bord, un sistem de orientare și stabilizare și așa mai departe.

Figura 2. Segmentul spațial al sistemelor GLONASS și GPS

Figura 3. Segmentul complexului de control la sol al sistemului Glonass

Figura 4. Segmentul complexului de control la sol al sistemului GPS
Segmentul complexului de control la sol al sistemului GLONASS îndeplinește următoarele funcții:
- efemeride și suport timp-frecvență;
- monitorizarea domeniului radionavigatiei;
- monitorizarea radiotelemetrică a NSA;
- comanda și programul de control radio al NSA.
Pentru a sincroniza scalele de timp ale diferiților sateliți cu precizia necesară, la bordul satelitului sunt utilizate standarde de frecvență de cesiu cu o instabilitate relativă de ordinul 10-13. Complexul de control la sol folosește un standard de hidrogen cu o instabilitate relativă de 10-14. În plus, GCC include mijloace pentru corectarea scărilor de timp ale satelitului în raport cu scara de referință cu o eroare de 3-5 ns.
Segmentul de sol oferă suport pentru efemeride prin satelit. Aceasta înseamnă că parametrii mișcării sateliților sunt determinați la sol, iar valorile acestor parametri sunt prezise pentru o perioadă de timp predeterminată. Parametrii și prognoza acestora sunt incluși în mesajul de navigație transmis de satelit odată cu transmiterea semnalului de navigație. Aceasta include, de asemenea, corecțiile timp-frecvență ale scalei de timp de la bord a satelitului în raport cu ora sistemului. Măsurarea și predicția parametrilor mișcării satelitului sunt efectuate în centrul balistic al sistemului pe baza rezultatelor măsurătorilor de traiectorie ale distanței până la satelit și vitezei radiale a acestuia.
Sistem de navigație prin satelit de rețea GPS
Sistem GPS american de unul singur funcţionalitate este similar cu sistemul intern Glonass. Scopul său principal este determinarea de înaltă precizie a coordonatelor consumatorului, care alcătuiesc vectorul viteză, și legarea la scara de timp a sistemului. Similar cu cel intern, sistemul GPS a fost dezvoltat pentru Departamentul de Apărare al SUA și se află sub controlul acestuia. Conform documentului de control al interfeței, principalii dezvoltatori ai sistemului sunt:
- în segmentul spațial - Divizia Spațială Internațională Rockwell, Divizia Spațială Astro Martin Marietta;
- pe segment de management - IBM, Federal System Company;
- pe segmentul de consumatori - Rockwell International, Collins Aviation & Communication Division.
La fel ca sistemul Glonass, GPS-ul constă dintr-un segment spațial, un complex de măsurare a comandă la sol și un segment de consum.
După cum am menționat mai sus, constelația orbitală GPS este formată din 28 de nave spațiale de navigație. Toate sunt pe orbite circulare cu o perioadă de revoluție în jurul Pământului egală cu 12 ore. Altitudinea orbitală a fiecărui satelit este de ~ 20.000 km. Sistemele GPS prin satelit au suferit o serie de îmbunătățiri care le-au afectat performanța generală. Masa 1 spectacole caracteristici scurte nave spațiale utilizate în sistem.
Tabelul 1. Caracteristicile navelor spațiale utilizate în sistemul GPS
| tip NSA | Masa pe orbită | Puterea surselor de energie, W | Viața activă estimată | Anul lansării primei NSA |
| Blocul-I | 525 | 440 | - | 1978 |
| Blocul II | 844 | 710 | 5 | 1989 |
| Bloc-IIR | 1094 | 1250 | 7,5 | 1997 |
| Bloc-IIF | - | - | 14–15 | 2001–2002 |
Tabelul 2. Caracteristici comparative ale sistemelor GLONASS și GPS
| Index | GLONASS | GPS |
| Numărul de nave spațiale dintr-o constelație orbitală completă | 24 | 24 |
| Planuri orbitale | 3 | 6 |
| Numărul de nave spațiale din fiecare avion | 8 | 4 |
| Înclinarea orbitei | 64,8º | 55º |
| Altitudinea orbitală, km | 19 130 | 20 180 |
| Perioada orbitală a satelitului | 11 ore 15 minute 44 s | 11 ore 58 minute 00 s |
| Sistem de coordonate | PZ-90 | WGS-84 |
| Masa navei spațiale de navigație, kg | 1450 | 1055 |
| Puterea panourilor solare, W | 1250 | 450 |
| Viață activă, ani | 3 | 7,5 |
| Mijloace pentru lansarea navelor spațiale pe orbită | „Proton-K / DM” | Delta 2 |
| Numărul de nave spațiale lansate într-o singură lansare | 3 | 1 |
| Cosmodrom | Baikonur (Kazahstan) | Capul Canaveral |
| Timp de referință | UTC (SU) | UTC (NU) |
| Metoda de acces | FDMA | CDMA |
| Frecvența purtătoarei: L1 L2 |
1598,0625-1604,25 7/9 L1 |
1575,42 60/77 L1 |
| Polarizare | Pe partea dreaptă | Pe partea dreaptă |
| Tipul secvenței PN | secvența m | Cod de aur |
| Număr de puncte de cod: C/A P |
511 51 1000 |
1023 2,35x1014 |
| Rata de codare, Mbps: C/A P |
0,511 5,11 |
1,023 10,23 |
| Nivel de interferență radio în interiorul sistemului, dB | -48 | -21,6 |
| Structura mesajului de navigare | ||
| Rata de transfer, biți/s | 50 | 50 |
| Tipul de modulație | BPSK (Manchester) | BPSK NRZ |
| Lungimea supercadru, min. | 2.5 (5 cadre) | 12.5 (25 cadre) |
| Lungimea cadrului, s | 30 (15 linii) | 30 (5 linii) |
| Lungimea șirului, s | 2 | 6 |
La proiectarea sistemului în ansamblu și a NSA în special, se acordă multă atenție problemelor funcționării autonome. Astfel, nava spațială din prima generație (Block-I) a asigurat funcționarea normală a sistemului (adică fără erori semnificative în determinarea coordonatelor) fără intervenția segmentului de control timp de 3-4 zile. În dispozitivele Block-II, această perioadă a fost mărită la 14 zile. În noua modificare a satelitului, Block-IIR permite funcționarea autonomă timp de 180 de zile fără ajustarea parametrilor orbitei de la sol, folosind doar un complex autonom pentru sincronizarea reciprocă a sateliților. Dispozitivele Block-IIF ar trebui să fie folosite în loc de Block-IIR folosit.
Structura semnalelor radio de navigație ale sistemului Glonass
Sistemul Glonass utilizează semnale de multiplexare prin diviziune de frecvență (FDMA) emise de fiecare satelit - două semnale cu defazare. Frecvența primului semnal este în intervalul L1 ~ 1600 MHz, iar frecvența celui de-al doilea este în intervalul L2 ~ 1250 MHz. Valorile nominale ale frecvențelor de operare ale semnalelor radio transmise în benzile L1 și L2 sunt determinate de expresia:
f k1 = f 1 + kD f 1
f k2 = f 2 + kD f 2 k = 0,1, ..., 24, (1)
unde k = 0,1, ..., 24 - numere de litere (canale) ale frecvențelor de lucru ale sateliților;
f 1 = 1602 MHz; Df1 = 9/16 = 0,5625 MHz;
f2 = 1246 MHz; D f 2 = 7/16 = 0,4375 MHz.
Pentru fiecare satelit, frecvențele de operare ale semnalelor din benzile L1 și L2 sunt coerente și sunt formate dintr-o referință de frecvență. Raportul frecvențelor de operare ale purtătorului fiecărui satelit:
D f k1 / D f k2 = 7/9.
Valoarea nominală a frecvenței generatorului de bord, din punctul de vedere al unui observator pe suprafața Pământului, este de 5,0 MHz.
În banda L1, fiecare satelit al sistemului Glonass emite 2 purtători la aceeași frecvență, decalați unul față de celălalt în fază cu 90º (Fig. 5).

Figura 5. Diagrama vectorială a semnalelor purtătoare ale sistemelor GLONASS și GPS
Unul dintre purtători este supus deplasării de fază la 180º. Semnalul modulator se obține prin adăugarea a trei semnale binare modulo 2 (Fig. 6):
- un cod de distanță grosier transmis la o rată de 511 Kbit / s (Fig. 6c);
- secvențe de date de navigație transmise la o rată de 50 biți / s (Fig. 6a);
- forma de undă meander transmisă cu o viteză de 100 biți / s (Fig. 6b).

Figura 6. Structura semnalului GLONASS
Semnalul din gama L1 (similar codului C/A din GPS) este disponibil pentru toți consumatorii din intervalul de vizibilitate al navei spațiale. Semnalul L2 este destinat scopurilor militare, iar structura sa nu a fost dezvăluită.
Compoziția și structura mesajelor de navigație ale sateliților sistemului Glonass
Mesajul de navigare se formează sub formă de linii care urmează continuu, fiecare cu o durată de 2 s. Prima parte a liniei (interval de 1,7 s) transmite date de navigare, iar a doua (0,3 s) - Marca temporală. Este o secvență pseudo-aleatorie scurtată de 30 de simboluri cu o frecvență de ceas de 100 bps.
Mesajele de navigație ale sateliților Glonass sunt necesare utilizatorilor pentru determinările de navigație și planificarea sesiunilor de comunicare cu sateliții. În funcție de conținutul lor, mesajele de navigare sunt împărțite în informații operaționale și neoperaționale.
Informațiile operaționale se referă la satelitul de la care au fost primite. Informațiile operaționale includ:
- digitizarea marcajelor de timp;
- diferența relativă a frecvenței purtătoarei de satelit față de valoarea nominală;
- informații efemeride.
Timpul de legare a informațiilor efemeride și corecțiile frecvență-timp, care au o frecvență de jumătate de oră de la începutul zilei, fac posibilă determinarea cu precizie a coordonatelor geografice și a vitezei satelitului.
Informațiile neoperaționale conțin un almanah, inclusiv:
- date despre starea tuturor sateliților din sistem;
- deplasarea scării de timp a satelitului în raport cu scara sistemului;
- parametrii orbitelor tuturor sateliților din sistem;
- corectare la scara de timp a sistemului Glonass.
Alegerea „constelației” optime a navei spațiale și prognoza deplasării Doppler a frecvenței purtătoare este asigurată prin analiza almanahului de sistem.
Mesajele de navigație ale sateliților GLONASS sunt structurate sub formă de supercadre de 2,5 minute. Un supercadru este format din cinci cadre cu o durată de 30 s. Fiecare cadru conține 15 linii cu o durată de 2 s. Din cele 2 s de durata liniei, ultimele 0,3 s sunt luate de marca temporală. Restul liniei conține 85 de caractere de informații digitale transmise la 50 Hz.
Ca parte a fiecărui cadru, sunt transmise întreaga cantitate de informații operaționale și o parte din almanahul de sistem. Almanahul complet este conținut în întregul supercadru. În acest caz, informațiile super-cadru conținute în rândurile 1–4 se referă la satelitul din care provine (partea operațională) și nu se modifică în cadrul super-cadrului.
Structura semnalelor radio de navigație GPS
GPS folosește multiplexarea prin diviziune de cod (CDMA), astfel încât toți sateliții transmit semnale la aceeași frecvență. Fiecare satelit GPS emite două semnale cu taste de schimbare de fază. Frecvența primului semnal este L1 = 1575,42 MHz, iar al doilea - L2 = 1227,6 MHz. Semnalul purtător L1 este modulat de două secvențe binare, fiecare dintre acestea fiind formată prin însumarea codului telemetrul modulo 2 și a sistemului transmis și a datelor de navigație generate la o rată de 50 biți/s. La frecvența L1 sunt transmise două componente în cuadratură, secvențe binare bifazice. Prima secvență este suma modulo 2 a codului precis P sau codului Y clasificat și a datelor de navigație. A doua secvență este, de asemenea, suma modulo 2 a codului grosier C / A (deschis) și aceeași secvență de date de navigație.
Semnalul radio la frecvența L2 este codat bifazic doar de una dintre cele două secvențe considerate anterior. Alegerea secvenței de modulare se realizează prin comandă de la sol.
Fiecare satelit folosește propriile coduri de telemetru C/A și P (Y), care permite separarea semnalelor satelitului. În procesul de formare a unui cod P (Y) precis, marcajele temporale ale semnalului satelitului sunt formate simultan.
Compoziția și structura mesajelor de navigație ale sateliților GPS
Împărțirea structurală a informațiilor de navigație a sateliților GPS se realizează în supercadre, cadre, subcadre și cuvinte. Un supercadru este format din 25 de cadre și durează 750 s (12,5 minute). Un cadru este transmis în 30 de secunde și are o dimensiune de 1500 de biți. Cadrul este împărțit în 5 subcadre a câte 300 de biți fiecare și este transmis pe un interval de 6 s. Începutul fiecărui subcadru indică un marcaj de timp corespunzător începutului / sfârșitului următorului interval de timp al sistemului GPS de 6 s. Un subcadru este format din 10 cuvinte de 30 de biți. În fiecare cuvânt, cei 6 biți cei mai puțin semnificativi sunt biți de verificare.
În subcadrele 1, 2 și 3 se transmit date despre parametrii de corecție a ceasului și date despre efemeridele navei spațiale cu care se stabilește comunicarea. Conținutul și structura acestor subcadre rămân neschimbate în toate paginile supercadrelor. Al 4-lea și al 5-lea subcadre conțin informații despre configurația și starea tuturor navelor spațiale din sistem, almanahurile navelor spațiale, mesaje speciale, parametri care descriu relația dintre ora GPS și UTC și așa mai departe.
Algoritmi pentru recepția și măsurarea parametrilor semnalelor de navigație radio prin satelit
Segmentul consumatorilor de sisteme GPS și GLONASS include receptoare de semnale prin satelit. Problema navigației este rezolvată prin măsurarea parametrilor acestor semnale. Receptorul poate fi împărțit în trei părți funcționale:
- partea de radiofrecvență;
- digital ~ corelator;
- CPU.
De la ieșirea dispozitivului de alimentare a antenei (antenă), semnalul merge către partea de frecvență radio (Fig. 7). Sarcina principală a acestei părți este amplificarea semnalului de intrare, filtrarea, conversia frecvenței și conversia analog-digitală. În plus, frecvența de ceas pentru partea digitală a receptorului provine din partea de frecvență radio a receptorului. De la ieșirea părții de radiofrecvență, mostre digitale ale semnalului de intrare sunt alimentate la intrarea corelatorului digital.

Figura 7. Structura generalizată a receptorului
În corelator, spectrul semnalului este transferat la frecvența „zero”. Acest lucru se realizează prin înmulțirea semnalului de intrare a corelatorului cu oscilația armonică de referință în canalele în fază și în cuadratura. Mai mult, rezultatul înmulțirii este supus procesării corelației prin înmulțirea cu codul de referință și acumularea pe perioada codului. Ca rezultat, obținem integralele de corelație I și Q. Citirile integralelor de corelație sunt transmise procesorului pentru procesarea ulterioară și închiderea buclelor PLL (bucla blocată în fază) și CVD (circuit de urmărire a întârzierii). Măsurătorile parametrilor semnalului din receptor se fac nu direct prin semnalul de intrare, ci prin copia exactă a acestuia formată de sistemele PLL și CVD. Integralele de corelație I și Q vă permit să estimați gradul de „asemănare” (corelație) a semnalelor de referință și de intrare. Sarcina corelatorului, pe lângă formarea integralelor I și Q, este de a forma un semnal de referință în conformitate cu acțiunile de control (codurile de control) venite de la procesor. În plus, la unele receptoare, corelatorul generează măsurătorile necesare ale semnalelor de referință și le transferă procesorului pentru procesare ulterioară. În același timp, întrucât semnalele de referință din corelator sunt formate în funcție de codurile de control primite de la procesor, măsurătorile necesare ale semnalelor de referință pot fi efectuate direct în procesor, procesând codurile de control corespunzător, ceea ce se face în multe receptoare moderne.
Ce parametri de semnal sunt măsurați de corelator (procesor)?
Intervalul pentru măsurători de inginerie radio este caracterizat de timpul de propagare a semnalului de la obiectul de măsurat la punctul de măsurare. In sistemele de navigatie GPS/GLONASS, emisia de semnale este sincronizata cu scara de timp a sistemului, mai exact, cu scara de timp a satelitului care emite acest semnal. În același timp, consumatorul are informații despre discrepanța dintre scara de timp a satelitului și a sistemului. Informațiile digitale transmise de la satelit fac posibilă stabilirea momentului de emisie a unui anumit fragment de semnal (marca temporală) de către satelit în timpul sistemului. Momentul primirii acestui fragment este determinat de scala de timp a receptorului. Scala de timp a receptorului (consumatorului) este formată folosind standarde de frecvență de cuarț, deci există o „derire” constantă a scării de timp a receptorului în raport cu scara de timp a sistemului. Diferența dintre momentul recepționării unui fragment al semnalului, măsurat pe scara de timp a receptorului, și momentul emiterii acestuia de către satelit, măsurat pe scara satelitului, înmulțit cu viteza luminii, se numește pseudorange. . De ce pseudo-gamă? Deoarece diferă de intervalul adevărat printr-o sumă egală cu produsul dintre viteza luminii și „deriva” scării de timp a receptorului în raport cu scara de timp a sistemului. La rezolvarea problemei de navigare, acest parametru este determinat împreună cu coordonatele consumatorului (receptorului).
Integrale de corelație formate în corelator fac posibilă urmărirea modulării semnalului satelitului prin simboluri de informații și calcularea marcajului de timp în semnalul de intrare. Timpurile urmează la intervale de 6 s pentru GPS și 2 s pentru GLONASS și formează un fel de scară de 6 (2) secunde. Într-o diviziune a acestei scale, perioadele codului de măsurare formează o scară de 1 ms. O milisecundă este împărțită, la rândul său, în elemente separate (cipuri, în terminologia GPS): pentru GPS - 1023, pentru GLONASS - 511. Astfel, elementele codului telemetrului permit determinarea distanței până la satelit cu o eroare de ~ 300 m. Pentru o determinare mai precisă este necesară cunoașterea fazei generatorului de cod de rang. Schemele de construire a generatoarelor de referință ale corelatorului fac posibilă determinarea fazei acestuia cu o precizie de până la 0,01 perioade, ceea ce reprezintă o precizie de determinare a pseudoramei de 3 m.
Pe baza măsurătorilor parametrilor de referință oscilație armonică, format din sistemul PLL, determină frecvența și faza oscilației purtătorului satelitului. Deriva sa față de valoarea nominală va da deplasarea frecvenței Doppler, care este utilizată pentru a estima viteza utilizatorului în raport cu satelitul. În plus, măsurătorile de fază purtătoare pot fi utilizate pentru a rafina raza de acțiune a satelitului cu o eroare de câțiva milimetri.
Pentru a determina coordonatele consumatorului, este necesar să se cunoască coordonatele sateliților (cel puțin 4) și distanța de la consumator la fiecare. satelit vizibil... Pentru ca consumatorul să determine coordonatele sateliților, semnalele de navigație emise de aceștia sunt modelate prin mesaje despre parametrii mișcării acestora. În echipamentul consumatorului, aceste mesaje sunt extrase și coordonatele sateliților sunt determinate la momentul dorit.
Coordonatele și componentele vectorului viteză se modifică foarte repede, prin urmare, mesajele privind parametrii mișcării sateliților conțin informații nu despre coordonatele acestora și componentele vectorului viteză, ci informații despre parametrii unui anumit model care aproximează traiectoria. a mișcării navei spațiale pe un interval de timp suficient de lung (aproximativ 30 de minute). Parametrii modelului de aproximare se modifică destul de lent și pot fi considerați constanți pe intervalul de aproximare.
Parametrii modelului de aproximare sunt incluși în mesajele de navigație ale sateliților. Sistemul GPS folosește modelul Keplerian de mișcare cu elemente osculatoare. În acest caz, traiectoria de zbor a navei spațiale este împărțită în secțiuni de aproximare cu o durată de o oră. În centrul fiecărei secțiuni este stabilit un moment nodal de timp, a cărui valoare este comunicată consumatorului de informații de navigație. În plus, consumatorul este informat despre parametrii modelului elementelor osculatoare la momentul nodal în timp, precum și despre parametrii funcțiilor care aproximează modificările în timp ale parametrilor modelului elementelor osculatoare, atât în elementul nodal precedent și urmând acestuia.
În echipamentul consumatorului se alocă un interval de timp între momentul în care trebuie determinată poziția satelitului și momentul nodal. Apoi, folosind funcțiile de aproximare și parametrii acestora, extrași din mesajul de navigare, se calculează la momentul necesar valorile parametrilor modelului elementelor osculatoare. În ultima etapă, folosind formulele uzuale ale modelului Keplerian, se determină coordonatele și componentele vectorului viteză al satelitului.
Sistemul GLONASS utilizează modele de mișcare diferențială pentru a determina poziția exactă a satelitului. În aceste modele, coordonatele și componentele vectorului viteza satelitului sunt determinate prin integrarea numerică a ecuațiilor diferențiale ale mișcării navei spațiale, luând în considerare un număr finit de forțe care acționează asupra navei spațiale. Condițiile inițiale pentru integrare sunt stabilite la momentul nodal de timp situat la mijlocul intervalului de aproximare.
După cum am menționat mai sus, pentru a determina coordonatele consumatorului, este necesar să se cunoască coordonatele sateliților (cel puțin 4) și distanța de la consumator la fiecare satelit vizibil, care este determinată în receptorul de navigație cu o precizie de aproximativ 1 m. Pentru comoditate, luați în considerare cel mai simplu caz "plat" prezentat în Fig. ... opt.

Figura 8. Determinarea coordonatelor consumatorului
Fiecare satelit (Fig. 8) poate fi reprezentat ca un emițător punctual. În acest caz, partea frontală a undei electromagnetice va fi sferică. Punctul de intersecție al celor două sfere va fi cel în care se află consumatorul.
Altitudinea orbitelor satelitului este de aproximativ 20.000 km. Prin urmare, al doilea punct de intersecție al cercurilor poate fi aruncat din cauza informațiilor a priori, deoarece este situat departe în spațiu.
Mod diferențial
Sistemele de navigație prin satelit permit utilizatorului să obțină coordonate cu o precizie de ordinul 10–15 m. Cu toate acestea, pentru multe sarcini, în special pentru navigația în orașe, este necesară o precizie mai mare. Una dintre principalele metode de creștere a preciziei determinării locației unui obiect se bazează pe aplicarea principiului măsurătorilor de navigație diferențială, cunoscut în radionavigația.
Modul diferențial DGPS (GPS diferențial) vă permite să setați coordonatele cu o precizie de 3 m într-un mediu de navigație dinamic și până la 1 m în condiții staționare. Modul diferențial este implementat folosind un receptor de control GPS numit stație de referință. Este situat într-un punct cu coordonate cunoscute, în aceeași zonă cu receptorul GPS principal. Comparând coordonatele cunoscute (obținute în urma relevării geodezice de precizie) cu cele măsurate, stația de referință calculează corecții, care sunt transmise consumatorilor prin radio într-un format prestabilit.
Echipamentul consumatorului primește corecții diferențiale de la stația de referință și le ia în considerare la determinarea locației consumatorului.
Rezultatele obținute prin metoda diferențială sunt foarte dependente de distanța dintre obiect și stația de referință. Aplicarea acestei metode este cea mai eficientă atunci când sunt predominante erorile sistematice din motive externe (în raport cu receptorul). Conform datelor experimentale, se recomandă localizarea stației de referință la cel mult 500 km de obiect.
În prezent, există multe sisteme diferențiale regionale și locale cu decalaje mari.
Ca sisteme cu zonă largă, merită remarcate sisteme precum WAAS american, EGNOS european și MSAS japonez. Aceste sisteme folosesc sateliți geostaționari pentru a transmite corecții către toți clienții din zona lor de acoperire.
Sistemele regionale sunt destinate sprijinirii navigației pe secțiuni individuale ale suprafeței pământului. De obicei, sistemele regionale sunt utilizate în orașele mari, pe rutele de transport și râurile navigabile, în porturi și de-a lungul coastei mărilor și oceanelor. Diametrul zonei de lucru a sistemului regional este de obicei de la 500 la 2000 km. Poate include una sau mai multe stații de referință.
Sistemele locale au o rază de acțiune maximă de la 50 la 220 km. Ele includ de obicei unul stație de bază... Sistemele locale sunt de obicei clasificate în funcție de modul în care sunt utilizate: stații diferențiale locale maritime, aviatice și geodezice.
Dezvoltarea navigației prin satelit
Direcția generală de modernizare a sistemelor de satelit GPS și Glonass este asociată cu creșterea acurateței definițiilor de navigație, îmbunătățirea serviciului oferit utilizatorilor, creșterea duratei de viață și a fiabilității echipamentelor prin satelit de la bord, îmbunătățirea compatibilității cu alte sisteme de inginerie radio și dezvoltarea subsisteme diferențiale. Direcția generală de dezvoltare a sistemelor GPS și Glonass coincide, dar dinamica și rezultatele obținute sunt foarte diferite.
Îmbunătățirea sistemului GLONASS este planificată să fie realizată pe baza sateliților GLONASS-M de nouă generație. Acest satelit va avea o durată de viață sporită și va emite un semnal de navigație în banda L2 pentru aplicații civile.
O decizie similară a fost luată și în Statele Unite, unde pe 5 ianuarie 1999 a anunțat alocarea a 400 de milioane de dolari pentru modernizarea sistemului GPS asociat cu transmiterea codului C/A pe frecvența L2 (1222,7 MHz). ) și introducerea celui de-al treilea purtător L3 (1176, 45 MHz) pe nave spațiale, care va fi lansat din 2005. Semnalul la frecvența L2 este destinat a fi utilizat pentru nevoi civile nu are legătură directă cu pericolul pentru viața umană. Se propune începerea implementării acestei decizii în 2003. S-a decis utilizarea celui de-al treilea semnal civil pe frecvența L3 pentru nevoile aviației civile.
Literatură
- Sisteme de inginerie radio. Ed. Kazarinova Yu.M. M.: Liceu, 1990.
- Yu.A. Soloviev Sisteme de navigație prin satelit. M .: Eco-Trends, 2000.
- Sistem global de radionavigație prin satelit GLONASS / Ed. V.N. Kharisova, A.I. Perova, V.A. Boldin. M.: IPRZhR, 1998.
- Lipkin I.A. Sisteme de navigație prin satelit. M .: Vuzovskaya kniga, 2001.
- Sistemul global de navigație prin satelit GLONASS. Document de control al interfeței. M .: KNITs VKS, 1995.
- Document de control al interfeței: NAVSTAR GPS Space Segment / Navigation User Interfaces (ICD-GPS-200). Rockwell Int. Corp. 1987.
Ideea de a localiza obiecte folosind sateliți artificiali de pământ le-a venit în minte americanilor încă din anii 1950. Cu toate acestea, oamenii de știință au fost împinși de satelitul sovietic.
Fizicianul american Richard Kershner și-a dat seama că, dacă cunoașteți coordonatele de pe sol, puteți afla viteza navei spațiale sovietice. Acesta a fost începutul implementării programului, care mai târziu a devenit cunoscut sub numele de GPS - un sistem de poziționare globală. În 1974, primul satelit american a fost lansat pe orbită. Inițial, acest proiect a fost destinat departamentelor militare.
Cum funcționează geolocalizarea

Să luăm în considerare caracteristicile geolocalizării folosind exemplul unui tracker convențional. Până în momentul activării, dispozitivul este în modul standby, modulul GPS GLONASS este oprit. Această opțiune este oferită pentru a conserva energia bateriei și pentru a crește durata de viață a bateriei dispozitivului.
În timpul activării, trei procese sunt lansate simultan:
- receptorul GPS începe să analizeze coordonatele folosind programul încorporat. Dacă în acest moment sunt găsiți trei sateliți, sistemul este considerat indisponibil. Același lucru se întâmplă și cu GLONASS;
- dacă un tracker (de exemplu, un navigator) acceptă module a două sisteme, atunci dispozitivul analizează informațiile primite de la ambii sateliți. Apoi citește informațiile pe care le consideră de încredere;
- daca la momentul potrivit semnalele ambelor sisteme nu sunt disponibile, atunci GSM este pornit. Dar datele obținute în acest fel vor fi inexacte.
Prin urmare, punând întrebarea: ce să alegeți - GPS sau GLONASS, alegeți echipamente cu suport pentru două sisteme de satelit. Neajunsurile muncii unuia dintre ei vor fi acoperite de celălalt. Astfel, semnalele de la 18-20 de sateliți sunt disponibile simultan pentru receptor. Acest lucru asigură un nivel bun al semnalului și o stabilitate și minimizează erorile.
Costul serviciului de monitorizare GPS și GLONASS
Mai mulți factori afectează costul final al echipamentului:
- tara producatoare;
- ce sisteme de navigație sunt folosite;
- materiale de calitate și funcții suplimentare;
- întreținere software.
Cel mai o varianta bugetara- Echipamente de fabricație chineză. Prețul începe de la 1000 de ruble. Cu toate acestea, nu trebuie să ne așteptăm la servicii de calitate. Pentru astfel de bani, proprietarul va primi o funcționalitate limitată și o durată de viață scurtă.
Următorul segment de echipamente este producătorii europeni. Suma începe de la 5.000 de ruble, dar în schimb cumpărătorul primește software stabil și funcții avansate.
Producătorii ruși oferă echipamente destul de rentabile la un preț rezonabil. Prețurile pentru trackerele interne încep de la 2500 de ruble.
Element de cheltuieli separat - taxă de abonament și plată servicii aditionale... Taxa lunară pentru companiile naționale este de 400 de ruble. Producătorii europeni deschid opțiuni suplimentare pentru o „monedă” suplimentară.
De asemenea, va trebui să plătiți pentru instalarea echipamentului. În medie, instalarea în centru de service va costa 1.500 de ruble.
Avantajele și dezavantajele GLONASS și GPS
Acum să ne uităm la avantajele și dezavantajele fiecărui sistem.
Sateliții GPS apar cu greu în emisfera sudică, în timp ce GLONASS transmite semnale către Moscova, Suedia și Norvegia. Claritatea semnalului este mai bună pentru sistemul american cu 27 de sateliți activi. Diferența de eroare „jucă în mâinile” sateliților americani. Pentru comparație: inexactitatea lui GLONASS este de 2,8 m, pentru GPS - 1,8 m. Cu toate acestea, aceasta este o cifră medie. Puritatea calculelor depinde de poziția sateliților pe orbită. În unele cazuri, mașinile sunt aranjate în așa fel încât gradul de calcul greșit să crească. Această situație apare cu ambele sisteme.
rezumat
Deci, ce va câștiga comparația GPS vs GLONASS? Strict vorbind, utilizatorilor civili nu le pasă ce sateliți folosește tehnologia lor de navigație. Ambele sisteme sunt gratuite și open source. Integrarea reciprocă a sistemelor va fi o decizie rezonabilă a dezvoltatorilor. În acest caz, numărul necesar de dispozitive va fi în „câmpul vizual” al trackerului chiar și în condiții meteorologice nefavorabile și interferențe sub formă de clădiri înalte.
GPS și GLONASS. Videoclipuri similare
 Calculul caracteristicilor de stabilitate ale sistemului operațional de comunicații
Calculul caracteristicilor de stabilitate ale sistemului operațional de comunicații Software pentru crearea PDF
Software pentru crearea PDF Canal discret. Interferență în canalele de comunicare
Canal discret. Interferență în canalele de comunicare Cum să utilizați QoS pentru a asigura calitatea accesului la Internet Unde este programatorul de pachete qos
Cum să utilizați QoS pentru a asigura calitatea accesului la Internet Unde este programatorul de pachete qos Instalare și configurare de bază Sendmail pe Ubuntu Server
Instalare și configurare de bază Sendmail pe Ubuntu Server Instalați VPN în conexiune Ubuntu Vpn ubuntu
Instalați VPN în conexiune Ubuntu Vpn ubuntu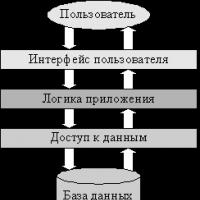 Arhitectură de sistem distribuit Platformă IoT în cloud la scară largă
Arhitectură de sistem distribuit Platformă IoT în cloud la scară largă