Utilizando un radar para discrepancia. Un algoritmo de acción ejemplar para maniobrar al trabajar con una tableta maniobrable maniobrable, cómo medir la velocidad.
Tipo de Documento: Kit de herramientas | Doc.
Popularidad: 0.23%
Páginas: 16.
Idioma: Ucraniano ruso.
Año de publicación: 2005.
Methodichn en el Vkazvki TRACA a Vincannya Roboti Rlob ‡ Disciliplin "Traphery Experience z Zarp" para Studentiv 4to curso en ausencia en Ucrania Involutión Especialmente 7.100301
Cada estudiante de acuerdo con su opción realiza 5 tareas en forma de una tableta maniobrable y responde a 2 preguntas en una hoja separada. Las formas de tabletas maniobrables con tareas resueltas y una lista con las respuestas se introducen en una carpeta separada.
La versión del trabajo de prueba se selecciona de acuerdo con el último dígito del cifrado personal.
Opción №№ Tareas Número de problemas
1 1, 11, 21, 31, 41 1, 11
2 2, 12, 22, 32, 42 2, 12
3 3, 13, 23, 33, 43 3, 13
4 4, 14, 24, 34, 44 4, 14
5 5, 15, 25, 35, 45 5, 15
6 6, 16, 26, 36, 46 6, 16
7 7, 17, 27, 37, 47 7, 17
8 8, 18, 28, 38, 48 8,18
9 9, 19, 29, 39, 49 9, 19
10 10, 20, 30, 40, 50 10, 20
Para la ejecución competente del trabajo de prueba, es necesario explorar las reglas No. 5, 6, 7, 8, 9, 10 de MPPS-72, así como instrucciones metódicas breves sobre la solución gráfica de tareas en la tableta maniobrable.
En la página de título de la carpeta de trabajo de prueba, especifique el nombre, nombre, patronímico de un número, número de cifrado personal, nombre de disciplina, curso de opción, especialidad.
El trabajo realizado dentro del período prescrito se transmite para verificar al maestro.
Se le permite probar a un estudiante, quien realizó el trabajo de control y laboratorio.
Breves instrucciones metódicas sobre la solución gráfica de tareas en la tableta maniobrable.
El procedimiento para resolver el problema de las discrepancias con una nave.
en una tableta maniobrable
(Ver Apéndices 1, 2)
Las condiciones de visibilidad limitada son las condiciones especiales de la natación, por lo tanto, el "simulador de radar" de la disciplina y el "simulador SARP" sugieren que hay en primer lugar nadando en estas condiciones.
Cuando nadando con visibilidad limitada en el mar abierto, la descripción general de los alrededores que usan el radar se realiza principalmente en escalas de escala de 12 a 16 millas, y esta distancia es probablemente una distancia de la detección de la mayoría de los buques.
Buena práctica marítima para resolver el problema de las discrepancias con los tribunales en el mar abierto, recomienda dividir la pantalla RLS en tres zonas:
1) la zona de evaluación de la situación de 12 a 8 millas, donde se determinan el grado de riesgo de colisión, los metros de parejas del movimiento de los buques que se aproximan y la maniobra está perdiendo;
2) Zona de maniobras de 8 a 4 millas. Se recomienda las acciones de discrepancias para tomar lo antes posible después del establecimiento del riesgo de colisión;
3) Zona de acercamiento excesivo de 4 millas. Antes de la entrada del eco del barco en esta zona, la maniobra de discrepancia en el mar abierto debe completarse de modo que al cambiar la situación como resultado de las maniobras incorrectas de los buques, hubo tiempo y espacio para eliminar el riesgo de colisión.
Cuando nadan en las condiciones de visibilidad limitada de los tribunales privilegiados, no hay deber de prevenir la colisión, y la siguiente prioridad de las maniobras se asigna a cada recipiente con RLS.
1. Girar a la derecha;
2. Reducción de la velocidad;
3. Soporte de barco;
4. Gire a la izquierda.
El supuesto principal para resolver el problema de las discrepancias en una tableta maniobrable (tableta situacional) y usar SARP es la inmutabilidad de los parámetros de movimiento (cursos y velocidades) de su propio barco y otros buques para el período de conjunto de información y resolver el problema.
El momento comenzó a resolver el problema, el momento del comienzo de la discrepancia, el "punto cero" es el momento de eliminar la primera referencia del Lege y la distancia al primer objetivo.
El tiempo de regreso a los parámetros iniciales del movimiento de su propio barco es el momento del final de la discrepancia.
Cuando se enciende el radar, es necesario ajustar correctamente el brillo y la mejora del receptor, y si es necesario, reducir los efectos de la interferencia de la emoción y la precipitación.
El procedimiento para resolver el problema de las discrepancias en una tableta maniobrable:
1) Desde el centro de la tableta, mantenga presionado el vector de mover su propio barco en 6 minutos, vn.
2) Haz entradas en la tabla de procesamiento de información de radar sobre el curso (CN) y la velocidad (VN) de su propio barco.
3) Desde el centro de la tableta por el radio de Dzad. Circulo. Recomendado con visibilidad limitada para tomar en las condiciones de la Dzad del mar abierto. \u003d 1.5 ÷ 2 millas, y en las aguas estrechas de DVD. \u003d 0.5 millas.
4) Observando la situación en la pantalla RLS para seleccionar el cambio en las coordenadas polares relativas (ΔP ≈ 0 y ΔD 5) de la pantalla RLS para eliminar las referencias del cojinete y la distancia del recipiente peligroso de eco, inicie el cronómetro, Observe el tiempo del barco, haga registros en la información del radar de la tabla de procesamiento para el punto cero de tiempo 0 ا, portador y distancia para el buque A.
6) Según estos datos, coloque la situación inicial en la tableta maniobrable, refiriéndose al número de punto cero 0 ا y la letra grande A.
7) Uso de la regla paralela para enviar (Stick) El vector de mover la nave propio en 6 minutos en vn al punto cero y comenzó a designar la letra F (fija), el vector designa la letra Vn.
8) Realice una parte del círculo en el área del punto cero, hacia la derecha y hacia la izquierda (o círculo) con un radio de VN desde el Centro F, que acelerará la solución gráfica del problema.
9) En el 6º minuto, retire las referencias del cojinete y la distancia de eco del mismo recipiente A y escríbalos en la tabla de procesamiento de información de radar.
10) De acuerdo con los datos obtenidos, aplique un punto de 6 minutos en una tableta maniobrable, lo que lo indica con un número 6 ا.
11) Conecte el punto de cero y 6 minutos directo para determinar el vector de movimiento de destino relativo en 6 minutos. La flecha vectorial está dirigida a un punto de 6 minutos. Denota este vector VO.
12) Extienda el vector VO al centro de la tableta, obtenemos un registro, una trayectoria que moverá el eco del recipiente y con la inmutabilidad de los cursos y las tasas de su propia y las compras.
13) Desde el centro de la tableta en el registro, omite perpendicular y elimine el valor DCR.
14) Determine el vector gráfico VO desde el punto cero a la base de la línea perpendicular de la línea DCR la convergencia más corta de los vasos de TKR.
15) Los valores resultantes del registro DCR y TKR en la tableta maniobrable.
16) Conecte el punto F con un punto de 6 minutos directo, obtenemos un vectivo de destino de 6 minutos VC, dirigido en un punto de 6 minutos, designelo VC.
17) Uso de una regla y un medidor paralelos para determinar el curso verdadero y la velocidad del objetivo de la embarcación A, haciendo grabaciones en una tableta maniobrable;
18) Aplique el punto preventivo (se recomienda 12 minutos, teniendo en cuenta el tiempo establecido de tiempo (TN.I. \u003d 6 min., Resolviendo el problema de TR.Z. \u003d 3 min. Y realizando una maniobra TM \u003d 3 min) y pase las líneas punteadas de Tangents tangentes al círculo del radio del Dzad. Obtenemos pueblos para los cuales los ecos del recipiente deben moverse al realizar una maniobra. En el regazo, el lateral se dejará del recipiente y viceversa.
19) desde un punto de 6 minutos para pasar la línea paralela a años en la dirección opuesta para determinar el sector de los cursos peligrosos (jugo), más allá de lo cual debe retirar el final del vector VN para resolver el problema de la discrepancia. Si el punto F está dentro del jugo, es imposible resolver el problema de la discrepancia con una disminución de la velocidad.
20) Seleccione una maniobra de discrepancia efectiva a una distancia segura, y el cambio en el curso y / o la velocidad debe ser bastante grande para que se note la nave que se aproxima. La maniobra de torneado, en general, a la derecha, debe ser de al menos 30-45º, y la reducción de la velocidad debe ser al menos la mitad.
La maniobra combinada cambia en el curso y la velocidad en la práctica, rara vez se aplica debido al deterioro de la capacidad de administración del recipiente cuando se reduce la velocidad.
De acuerdo con los requisitos de la Regla 19 MPPSS-72 "... en la medida de lo posible para evitar:
- Cambios a la izquierda, si otro barco está por delante de la travesía y no se supera;
- Cambios en la dirección de la nave ubicada en la travesía o detrás del travesaño ";
- También se debe tener en cuenta las restricciones en el radar, debido a que el eco del recipiente a la izquierda no se puede observar en la pantalla.
Método de tira gráfica
La junta gráfica proporciona información más precisa sobre la situación de los tribunales y se realiza en una tableta maniobrable M-78 (Fig. 212)
La tarea de la discrepancia consiste en: 1) la aplicación de la situación inicial en la tableta y la construcción de triángulos de velocidades de vectores de velocidad relativa;
2) estimaciones de la situación de un acercamiento peligroso (colisión) con los tribunales, cuyos ecos se observan en la pantalla RLS, al calcular el tiempo de la convergencia / KR más corta, la intersección / "EP, la distancia de la convergencia más corta de DPR y identificar sus peligros reales y potenciales;
3) la elección y justificación de la maniobra, la asignación de buques con los que es necesario dispersarse;
4) Cálculo de la maniobra seleccionada utilizando la reconstrucción gráfica de los triángulos vectoriales de la situación inicial;
5) Cálculo del tiempo del inicio de la maniobra (teniendo en cuenta los elementos maniobrables
El recipiente), se selecciona el tiempo preventivo (3 o 6 minutos), la distancia de discrepancia, el tiempo de las discrepancias y la distancia desde su curso inicial durante la maniobra;
6) Aplicar la línea esperada de movimiento relativo (antiguo) y posterior control sobre el movimiento de la meta (barco observable).
Considere en detalle el proceso de resolución del problema de la discrepancia con la ayuda de la colocación gráfica (radar) en una tableta maniobrable.
1. Para la conveniencia de los cálculos, el intervalo de tiempo lleva 3 o 6 minutos, t e. 1/20 o 1/10 h.
2. Construye en la tableta de su vector central, por supuesto y la velocidad de VL de nuestro recipiente.
![]()
Higo. 213. Solución del problema de discrepancia con la colocación gráfica.
![]()
Figura 214 Determinación del peligro potencial y la ubicación del recipiente, para discrepancias con las que se requiere hacer una maniobra
3. Con la aparición en la pantalla RLS de las señales de ECHO, determinamos sus delers y distancias y se aplican a la tableta.
4. A través de los intervalos iguales del tiempo (3 o 6 minutos) en la secuencia anterior, aplicamos los siguientes puntos y, después de su compuesto, obtenemos los vectores de velocidad relativa.
5. Con estos vectores, construimos triángulos vectoriales, para los cuales el VC de su recipiente desde el centro de la tableta se transfiere al primer punto L al conectar el comienzo de su vector VC con el segundo punto 2, obtenemos el vector de velocidad del barco observado w
6. Los puntos de conexión de línea 1 y 2 se venderán para el centro de la tableta, obtendremos LOD.
La evaluación de la situación es determinar el grado de peligro de la colisión de los tribunales. Encontramos el DKP de distancia más corto, bajando perpendicular desde el centro de la tableta a LOD y el punto de intersección del curso del curso de DNEP Target, para lo cual realizamos una línea desde el centro de la tableta, paralelo al vector de velocidad. del "tribunal en el objetivo de cruzar
La identificación de la velocidad potencial de los buques se puede realizar de dos maneras:
1) PERDEMOS LA MANUVANA DE NUESTRO BUQUE (VC) O METERÍA DE VARIOS (V ") y determinamos cambiando el LOD y VO POSIBLE TRANSICIÓN DEL PELIGRO POTENCIAL DE REAL. Cambiando el curso, la velocidad o la maniobra combinada de nuestro recipiente a la derecha empeora la situación con el recipiente "B". En este caso, la maniobra es necesaria con el recipiente "B" (Fig. 214);
2) Uso de las características del movimiento de las señales de ECHO en el movimiento relativo en la pantalla RLS, que se desmontó en detalle con el método de evaluación visual.
Para seleccionar y justificar el tipo de maniobra, todas las opciones posibles están perdiendo: Cambio en el curso, la velocidad u otra al mismo tiempo, todos los factores asociados con la natación en visibilidad limitada, las características de navegación del área de buceo, MPPPSS-72 y el Capacidades maniobrables de su embarcación y una posible meta de barco de maniobra. El barco debe esforzarse por una discrepancia segura con una opción aceptable para calcular la maniobra utilizando una paleta y una regla. Minimiza el trabajo gráfico en uno o dos barcos. En la Fig. 215 Calcule maniobra para una discrepancia segura cambiando su curso a la derecha. La posición de los puntos previamente no afecta el método de cálculo utilizando los triángulos vectoriales de la situación inicial. Siempre debe recordarse que el momento del punto preventivo es el momento condicional del final de la maniobra.
El momento del inicio de la maniobra de su embarcación se calcula teniendo en cuenta los elementos maniobrables del recipiente (inercia, frenado, giro, etc.).
![]()
Higo. 215 cálculo de la maniobra para discrepancias para cambiar el curso a la derecha; El cálculo se realiza con el barco "B".
En el vector triángulo del recipiente "A" vector de nuestra velocidad, gire a la derecha hasta el ángulo calculado. Obtenemos un nuevo vector de Velocidad relativa VO y conecte el punto _2 con el extremo del vector VQ girado. En paralelo, los vectores de la velocidad relativa V "O del punto preventivo llevamos a cabo el" A ". El punto preventivo se toma en el mismo intervalo de tiempo. Después de eso, es posible determinar el tiempo de discrepancia de los vasos TPICX y La distancia de desecho D0TX de nuestro recipiente (ver Fig. 215).
Para calcular, usamos el nuevo vector de velocidad relativa con la distancia de desecho se calcula en la tableta. Para hacer esto, en la línea de nuestro nuevo curso, colocado desde el centro de la tableta, posponemos la distancia que nuestro barco pasará durante la discrepancia. Luego, desde el punto resultante, omite perpendicular a la línea del curso inicial. El segmento de esta perpendicular será la distancia desde el curso de la escala de la tableta.
El resultado de la maniobra es controlada por un exploratorio. No solo se aplica el recipiente a la tableta, en relación con la medida de la maniobra, sino también otros buques, que representan un peligro potencial. Estas líneas del movimiento relativo esperado se llevan a cabo para controlar la situación en desarrollo después de la maniobra, para detectar la maniobra de otros barcos de manera oportuna, así como en el caso de errores en los cálculos y edificios gráficos.
A partir de lo anterior, vemos que ambos métodos están interrelacionados y se complementan entre sí, asegúrenos de resolver problemas en la discrepancia segura de los tribunales que utilizan el radar en condiciones de visibilidad limitada.
En algunos barcos por encima de la pantalla RLS, se instala una tableta de espejo. Este es un dispositivo auxiliar que es un sistema óptico de no paraxus. La ventaja de la tableta del espejo es que hace posible realizar una junta gráfica sin interrumpir las observaciones en la pantalla RLS.
Mejorando periódicamente las calificaciones, los productores de la flota marina pasan las enseñanzas de capacitación para resolver problemas en los simuladores de radar.
Debido a la imposibilidad de las acciones acordadas de los buques (barcos) en condiciones de visibilidad limitada, el número de discrepancias se proporciona en la IPTSU, no en forma categórica, sino en forma de recomendaciones. De acuerdo con la Regla 19 p. El buque que ha encontrado otro barco con un radar, primero debe determinar si existe un riesgo de colisión. "Si hay dudas sobre el peligro de la colisión, se debe suponer que existe" (Regla 7 p. "A").
Elegir una maniobra para evitar el acercamiento excesivo depende de la situación. La maniobra puede proporcionar un cambio en el curso, la velocidad, así como la otra al mismo tiempo. Cambiar el curso y la velocidad debe ser significativo. Los pequeños cambios consistentes en el curso y la velocidad crean dificultades para interpretar información de radar en un barco competencia. Bajo el cambio en la velocidad, debe entenderse que reduce o detiene las máquinas, ya que el aumento de la velocidad en las condiciones de visibilidad limitada es contrario a las reglas.
Tabla 18.2. Datos tácticos y técnicos de algún radar de navegación.

La maniobra es solo un cambio en el curso es efectivo si el cambio del curso se realiza de antemano cuando hay suficiente espacio de agua y cuando esta maniobra no causa una convergencia excesiva con otros barcos. Sin embargo, la elección del curso del curso del curso se proporciona al Comandante del barco, sin embargo, las reglas recomiendan evitar:
Cambia a la izquierda cuando el otro recipiente está delante de la travesía, si este recipiente no está superado;
Cambios en la dirección del recipiente ubicado en la travesía o detrás de la travesía.
Análisis de la situación y la definición de los elementos del movimiento del objetivo (EDC).
Un análisis de la situación que utiliza una tableta maniobrable se realiza de la siguiente manera (Fig. 18.1):El lugar de su barco se considera en el centro de la tableta;
Sobre el rodamiento y las distancias, medido por un radar después de 1-2 minutos, se aplican a la tableta al menos dos lugares del objetivo;
A través de los puntos obtenidos M1, M2, M3 sostienen la línea de movimiento relativo de LOP1;
Desde el centro de la tableta hasta LOD1, se baja el perpendicular de la COP1, cuya longitud es la diferencia más corta en DKV.
Si DKP es más dosis, la amenaza de un acercamiento excesivo (peligroso) no lo es. No se requerirán cálculos y maniobras adicionales hasta que el objetivo cambie el curso o la velocidad.
Si DKP es menos dosis, se determina la definición del EDC:
Desde el punto hasta el vector de la velocidad de su vehículo VK;

Higo. 18.1. Un análisis de la situación, la definición del EDC y el cálculo de la maniobra de discrepancias con un solo objetivo en la tableta maniobrable.
- Desde el final del vector VK, se realiza una línea, paralela LOD1 en esta línea, el vector de la velocidad relativa de la VP que se calcula por la fórmula.

- Conectando el punto a con el extremo del vector VR, se obtiene el vector de velocidad VM;
Tiempo rápido con vista a la distancia más corta

Para analizar la situación y definir el EDC en una tableta maniobrable utilizando la tarjeta "Palma", se realizan los siguientes pasos:
La tableta maniobrable se coloca sobre la mesa y coordina la escala de rangos fijos de rango (NKD) con círculos de tabletas;
En los círculos de la tableta, las distancias inscriben y apaga el NKD;
Pase una línea del curso de la nave en la tableta (contando su barco en el centro) y combinelo con un curso de marcado de la imagen;
Sujetar la tableta y aplicar los lugares iniciales de los objetivos observados;
Después de 1-2 minutos, se aplican a la tableta al menos de dos a tres lugares de cada objetivo;
Realizar líneas de movimiento relativo de cada objetivo.
Por ubicación del LOD y el tamaño de DKP, los objetivos con los que es posible una convergencia excesiva. Se puede realizar un mayor procesamiento de información para calcular el EDC, como se indica anteriormente. Para acelerar el recibo del EDC, se presiona la siguiente recepción:
Tableta con metas impresas se desplazó a la velocidad en la cantidad pasada por la nave durante la observación de la distancia;
Aplique nuevos objetivos, cambiando la tableta cada vez que la tableta de nuevo a la velocidad de la distancia recorrida;
Al conectar el lugar adecuado de los objetivos, los vectores de la verdadera velocidad de cada uno de ellos se dirigen desde los puntos anteriores a lo siguiente;
La magnitud de los verdaderos vectores de velocidad se calculan, como de costumbre, a través de la distancia y la hora de las observaciones.
El método especificado es menos preciso que el anterior, pero le permite apreciar rápidamente la situación cuando se reunirá con varios barcos.
Si hay un verdadero movimiento en el modo de radar, es posible recibir el EDC directamente desde el indicador y detectar rápidamente su cambio. Sin embargo, en el indicador que se ejecuta en modo de movimiento verdadero, la definición de DKP y TKR es difícil, por lo tanto, para determinar con precisión estos valores, es necesario moverse al modo de movimiento relativo.
La definición del EDC en un mapa grande de (1: 50,000; 1: 25,000) se produce en las relaciones de navegación, donde el cálculo de la maniobra de discrepancia solo puede llevar a un curso peligroso. En este caso, el navegador tiene la oportunidad de poner la junta para sí misma y para el objetivo en movimiento absoluto sin separarse de la situación de la navegación. En el caso del uso del auto-partidario, existe la oportunidad de tener las coordenadas actuales de su nave para mantener una junta para varios propósitos y observe claramente la situación.
Las principales desventajas del método: la incapacidad para determinar rápidamente el riesgo de colisión; La distancia más corta a la meta DKP directamente desde la junta no se puede obtener; En el mapa, puede aplicar solo el punto de intersección de cursos verdaderos. Por lo tanto, simultáneamente con la junta en el movimiento absoluto, se recomienda el análisis de la situación y los cálculos a la discrepancia para producir en una tableta maniobrable por el prefijo "Palma" con la verificación de discrepancia en el mapa.
Cálculo y control de la maniobra de discrepancia con un solo objetivo en una tableta maniobrable
Si hay una amenaza de acercamiento excesivo, es decir, cuando DKP es menor que el DOS, debe cambiar el curso o la velocidad de su nave para que el objetivo salga del centro de la tableta (puntos K) a distancia más que D03. Para calcular la maniobra en la tableta, las siguientes acciones producen (Fig. 18.1):Calcular y aplicar a LOD1 la posición preventiva del objetivo de VC; La magnitud de M3MC \u003d VRTC, donde TZ \u003d 2--4 min, dependiendo de la capacitación del operador;
Desde el punto del MC, la tangente a la circunferencia de la tableta, correspondiente a la distancia predeterminada D03 y la placa de la discrepancia; recibir una nueva línea de movimiento relativo del objetivo de LOD2;
Se construyen dos nuevos triángulos de alta velocidad, para los cuales, desde el extremo del vector VM, la línea se realiza en la dirección opuesta, paralela LOD2 (en la Fig. 18.1 se muestra mediante la línea de puntos), hasta la intersección con un Círculo de una tableta correspondiente a VK;
A partir de los dos vectores del QC "y KK" Elija el que el vector de Velocidad relativa VP será mayor en valor absoluto y la tasa de CC "conducirá rápidamente a una discrepancia con el objetivo.
De manera similar, la maniobra se calcula cambiando la velocidad del curso. Después de recurrir al curso calculado (Velocidad de cambio) de las observaciones, el objetivo continúa y el control de maniobra se controla aplicando lugares de destino en la tableta. Si el lugar de propósito cae en la línea LOD2, la maniobra se realiza correctamente. Si el lugar del objetivo M5, M6, M7 yacía en la línea LOD3, paralelo LOD2, esto significa que el turno se ha iniciado anteriormente que el tiempo calculado y que la discrepancia se producirá a una distancia, mayor D03. Cambie la dirección de LOD, es decir, el desplazamiento del lugar de propósito en una dirección, indica un cambio en el EDC, que requerirá nuevos cálculos.
Características de usar Hollc "Ocean"
Incluye el radar "Océano", hay un dispositivo informático que permite (después de la captura manual del ECHO de destino) para determinar DKP, TKR y EDC. La precisión de la calculadora se caracteriza por los siguientes valores:DKP se determina con una precisión de 2-3 cabinas;
TCR se determina con una precisión de aproximadamente 2 minutos;
El curso del recipiente que se aproxima se determina con una precisión de 5-10 °, accidente cerebrovascular: de 0,5 a 1 toneladas.
Cálculo, la maniobra divergente se realiza en una tableta maniobrable, como se indicó anteriormente. El dispositivo informático le permite imitar la maniobra seleccionada (para "perderlo" con antelación) y estimar los resultados posibles, mientras que el LOD está resaltado en la pantalla indicadora.
Las opciones principales para discrepancias con un solo objetivo se dan en el § 23.11.
Cálculo en la tableta maniobrable de la maniobra de discrepancia con varios objetivos al mismo tiempo.
Una maniobra de discrepancia con varios contra-buques es simultáneamente la más difícil, pero la necesidad de ella ocurre cada vez más, especialmente en áreas de envío vivo. Hasta ahora, los métodos para calcular esta maniobra se basan en el uso de palets especiales, escóndete del operador el significado físico de la maniobra y, por lo tanto, no se vacué en la flota.El más racional es el cálculo con la construcción de los sectores de cursos relativos peligrosos (cocinar) propuestos por O. G. Morava. El cálculo de la maniobra en el método propuesto se hace de la siguiente manera (Fig. 18.2):
Con la detección en la pantalla de las recuadras (Objetos No. 1, 2, 3), llevan a cada una de ellas una junta relativa en una tableta maniobrable;
Habiendo realizado el LOD2 y LOD3, para revelar el riesgo de acercamiento excesivo con uno o más goles, determinar su EDC (VM1, VM2_ y VM3);
Para el objetivo con la velocidad relativa máxima (acercamiento con el que se producirá el DCR antes) asignar el momento de su llegada a la posición preventiva y se aplica en este momento las posiciones predichas de cada objetivo de 1 mc, 2 MC, HP;
Desde la posición pretense de cada objetivo, las tangentes se llevan a cabo por la circunferencia del DOS, determinando al sector peligroso (OS) de cada objetivo;
Al final de cada vector de la verdadera velocidad del objetivo VM1, VM2, VM3, construya un sector de cursos relativos peligrosos;
Para una discrepanación segura con todos los objetivos, cambie simultáneamente su curso o la velocidad para que el final de su Velocity Vector VK esté fuera del cocinero.

Higo. 18.2. Cálculo de una maniobra de discrepancia con varios objetivos simultáneamente en una tableta maniobrable
En la Fig. 18.2 Se puede ver que una disminución en la velocidad al valor de V "k le permite dispersarse con todos los objetivos en DKP más Dow. Si el final de su Velocity Vector VV se encuentra en la frontera con la COP-1, entonces el La discrepancia con el propósito de No. 1 se producirá a la distancia del Dow, y con otros, a una distancia mayor. Si el final de su Velocidad Vector V "" K estará en el punto de intersección de los lados de la SOK -2 y COP-3, entonces la discrepancia en la DOW se producirá con estos dos objetivos, y con el número de destino 1, a una distancia mayor. Opciones calculadas para discrepancias son reportados por el comandante del barco para seleccionar y aprobar uno de ellos. . El final de la maniobra de discrepancias con todos los objetivos puede considerarse el momento de venir el último de ellos a la travesía relativa.
* En el modo de operación automática, la precisión de la definición del rodamiento y la distancia del "Océano" de RLS a distancias de hasta 16 millas es de 0.5-0.7 ° y 30-40 m, respectivamente.
Hacia adelante
Tabla de contenido
atrás
Junta en una tableta maniobrable.
1. Junta verdadera.
Dicha junta se puede realizar directamente en un mapa de navegación de viaje a gran escala o hoja de papel. La esencia del método es la siguiente. Habiendo encontrado una señal de eco de otro recipiente en la pantalla indicadora, se determina por su cojinete P1 y la distancia D1, deja que el cronómetro, notará el T1 del barco, el curso de su cruce de la CN y la cuenta regresiva de Laga OL1. La ubicación del ECHO A1 se aplica a lo largo del cojinete y la distancia con respecto a su ubicación, después de seleccionar la escala deseada (Fig. 1). Después de un cierto período de tiempo (para los cálculos, se repite el intervalo en 3 o 6 minutos) las observaciones (P2, D2, T2, OL2) y las ubicaciones de su recipiente 02 y se causan el recipiente A2 observado A2. Después de gastar en los puntos A2, y A2, una línea recta, obtenemos una línea de verdadero movimiento de la meta del CC.
Por la distancia entre los puntos A 1 y A2 y la hora de T1 y T2, puede determinar la velocidad del objetivo VC y calcular cuándo y a qué distancia cruza el curso de nuestro recipiente Tper y el DPER.
Para determinar la distancia de la convergencia más corta de DKR y tiempo, el TCR desde el punto A2 se pospone al lado opuesto a su curso, navegando por el recipiente durante la primera y la segunda observación A2F \u003d O1O2. El segmento O1C realizado perpendicular a la línea que pasa a través de los puntos A1, y F será la distancia de la convergencia más corta. La ubicación de los tribunales en el momento de la convergencia más corta (puntos O1 y A4) se puede encontrar en movimiento paralelo del segmento de O1C a O4A4. Tiempo rápido para la distancia más corta

Para determinar las circunstancias de la reunión y los elementos del movimiento de otro buque, dos observaciones son suficientes. Sin embargo, para excluir las fallas en las observaciones y asegurarse de que los elementos del otro movimiento de la embarcación en el período de observación no sean inválidos, se recomienda aumentar el número de observaciones. Encontrar los tres objetivos aplicados en el tiempo en el mismo tiempo (A1, A2, A3) intervalo de tiempo (A1, A2, A3) en una directa e igualdad de las distancias A1A2 \u003d A2A3 indican tanto la ausencia de fallas en las observaciones y la invalimiento de Los elementos del movimiento objetivo durante T1 a T3.
Las ventajas del método de la junta verdadera deben atribuirse a su visibilidad. La desventaja es la complejidad relativa de las construcciones gráficas necesarias para determinar las circunstancias principales de la reunión: la distancia del acercamiento más corto y el tiempo.
2. Junta relativa.
Esta junta se ha generalizado, ya que las preguntas principales se resuelven de forma rápida y fácil y fácilmente: la distancia más corta es la prueba y después de qué hora. Con una colocación relativa, las circunstancias de la reunión y los elementos del movimiento de objetivos en el sistema de coordenadas móviles, cuyo comienzo se toma en la ubicación del buque observador. Esto corresponde a la imagen real que se observa el recipiente en la pantalla del indicador de movimiento relativo.
Desde el punto de acerca del lugar para el lugar de su recipiente, coloque el P1 y P2 y P2 observado, y la distancia D1 y D2 (Fig. 2), a través de los puntos obtenidos A1, y A2 se realizan por LOD. La longitud de la perpendicular del sistema operativo, bajada desde el punto del movimiento relativo, se encuentra en la distancia a escala seleccionada de la convergencia más corta de DKR. Tiempo rápido para la distancia más corta


Con la colocación relativa, la distancia en la que el objetivo se cruzará el curso de nuestro recipiente también se determinará rápidamente. Para hacer esto, es suficiente para medir la distancia del OP. (Si el LOD pasa en nuestra nariz, determine el punto de intersección del propósito de nuestro curso, y si el LOD pasa en nuestro feed, el punto de la intersección de nuestra meta de embarcaciones, para la cual se realiza el centro de la tableta. Una línea paralela a la intersección con LOD). El tiempo de intersección del TPER se determinará agregando al testimonio de los relojes de barco al momento de encontrar la ubicación de la señal ECHO en el punto A2 del intervalo de tiempo:

Es necesario recordar que, en primer lugar, el Vesphodent debe determinar las circunstancias principales de la reunión, es decir, DKR y TKR, y luego definir los elementos del movimiento de la meta.
El verdadero movimiento del objetivo es la suma de dos movimientos, relativos.
Y buque observador o
Dada la conmutatividad de la suma de los vectores. ![]() puede ser encontrado
puede ser encontrado
Dos caminos.
Construir un triángulo vectorial (ver Fig. 2), mostrado por líneas continuas, se llama recta. Bajo ello, el comienzo de los vectores de velocidad (líneas de caminos) que se colocan en la dirección del movimiento de los vasos están en un momento.
También se usa un constructo inverso, en el que los vectores que se posponen hacia el movimiento de los tribunales se converguen con sus extremos al punto común (mostrado por la línea de puntos).
En el futuro, utilizaremos principalmente la construcción directa, ya que es más conveniente al resolver las tareas de discrepancia.
La longitud del vector de movimiento de la embarcación debe ser igual a la escala seleccionada de nadar en su embarcación durante las observaciones tomadas para construir un triángulo vectorial. La longitud del vector objetivo obtenido corresponde a nadar el objetivo durante las observaciones.
3. Tableta maniobrable.
Una tableta maniobrable es una cuadrícula de coordenadas polares. Para acelerar los asentamientos asociados con la natación en el recipiente durante las observaciones, se coloca una escala logarítmica en una tableta maniobrable. Se construye de la siguiente manera: en un comienzo recto desde el punto de inicio en alguna escala, los segmentos se posponen igual a logaritmos decimales de números de 0,1 a 60 y digitalizados en los valores de estos números. Dado que dentro de las 60 unidades de acción con los minutos son similares a las acciones con números en un sistema decimal, se puede asignar ninguna muestra en la escala el nombre "Tiempo", "Distancia" o "Velocidad" y en los valores bien conocidos de Dos de ellos para encontrar el tercero, resolviendo la proporción.
https://pandia.ru/text/80/090/Images/Image012_74.gif "ancho \u003d" 331 "altura \u003d" 26 "\u003e
Cuando se utiliza una escala logarítmica, debe recordarse que los pies "superior" de la circulación (instalados en los recuentos grandes) muestran siempre la hora, y el "inferior" (instalado en los conteos más pequeños): velocidad y distancia.
Desde las observaciones hay un movimiento relativo de la marca, 2.2 millas en 8 minutos. Encuentra una velocidad relativa.
Ponemos la pierna inferior de la circulación para la división 2.2, y la parte superior - en la división de la escala "8";
sin cambiar la solución de circulat, movemos la pata superior de la circulación para dividir la escala "60". La pata inferior de la circulación mostrará la velocidad relativa VO \u003d 16.5 UZ.
t \u003d 17 min, v \u003d 15 uz. Encuentra la distancia S.
Ponemos los pies superiores de la circulación en la división "60", la más baja en "15";
sin cambiar la solución circular, movemos los pies superiores de la circulación para dividir la escala "17". La pata inferior de la circulación mostrará la distancia S \u003d 4.3 millas.
Con v \u003d 17, el recipiente pasó S \u003d 8.7 millas. Determine el tiempo para el cual el barco pasa esta distancia.
Ponemos los pies superiores de la circulación en la división "60", y la parte inferior, en la división de la escala "17";
sin cambiar la solución de zirculas, colocamos la pata inferior de la circulación para dividir la escala "8.7". Los pies superiores de la circulación mostrarán el tiempo t \u003d 31 min.
4. Elección y justificación de la maniobra para discrepancias en una distancia dada.
Si dkr< Dзадто необходимо предпринять маневр для расхождения с судном-целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию и выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя tкр, VO и Dзад, выбирает время начала маневра. Последующая графическая прокладка служит для проверки безопасности выбранного маневра и уточнения его величины.
La junta gráfica para justificar la maniobra de discrepancia en una distancia dada se muestra en la FIG. 3. Se lleva a cabo en la siguiente secuencia:
en LOD por el momento estimado de la maniobra o en la distancia deseada de la maniobra, el punto de la ubicación del objetivo en el momento del comienzo de la maniobra de discrepancia;
un giro mental del vector o cambio de su longitud de acuerdo con la vista seleccionada de la maniobra determina el lado de la reversión de la vida de la maniobra;
desde el punto m, gaste en la tangente de la Dzad del OLOD, mientras que de las dos posibles tangentes a la DVAD, la que se lleva a cabo que corresponde al lado de la reversión de LOD con la forma elegida de la maniobra;
a través del extremo del vector, paralelo a los más antiguos en la dirección opuesta a la dirección de los más antiguos, se realiza el vector de la nueva velocidad relativa;
si la maniobra se selecciona cambiando el curso, la nueva dirección del vector de velocidad de velocidad del observador se invierte alrededor del punto O1 antes de la intersección con el vector del nuevo vector de velocidad relativa; el ángulo entre los vectores y determinará el ángulo deseado de la longitud de onda;
si la maniobra se selecciona la velocidad, el nuevo vector de velocidad del observador es igual al vector del vector desde el punto O1 a la nueva línea de velocidad relativa;
si se selecciona una maniobra combinada por un curso y velocidad, para encontrar un nuevo curso de la embarcación de observadores alrededor del punto O1, el vector del vector de la embarcación observador se reduce de acuerdo con el accidente cerebrovascular estimado.

5. Contabilizando la inercia del barco.
Al resolver problemas en los capítulos anteriores, se asumió que el barco cambia instantáneamente sus elementos del movimiento y el LOD durante la maniobra, cambia bruscamente su dirección a la semilla. De hecho, es, por supuesto, no es así, y la inercia del recipiente debe ser considerada.
Contabilidad de circulación.
De acuerdo con el NSHP-82, los elementos de giro se presentan en la tabla de elementos maniobrables en forma de gráficos y mesa cuando circulan desde un giro delantero completo en el lado derecho e izquierdo de las mercancías y en lastre con la posición de El volante "" a bordo "" (\u003d 35 °) y "en el graduado" (\u003d 15 ÷ 20 °). Al resolver las tareas de este capítulo, se supone que se utilizarán los diagramas de circulación que se muestran en la figura. 4 para manejar el volante \u003d 20 °. Debe tenerse en cuenta que los parámetros de la circulación real del recipiente pueden diferir significativamente de la tabla dependiendo de la velocidad de velocidad, su aterrizaje (rollo y diferencial), relación precipitación y profundidad, dirección y resistencia del viento y la excitación.

Cuando el curso se cambia por el observador de recipientes (Fig. 5), en relación con la ubicación del objetivo se moverá a lo largo de la trayectoria curvilínea desde el punto M1 a LOD (en el momento del inicio de la maniobra del barco del asistente) hasta El punto F a los viejos (al final de la maniobra). En el futuro, el objetivo se mueve por una explotación a una distancia de un verdadero movimiento relativo de la meta será más difícil. Debido a la caída de la velocidad de la velocidad del observador de recipientes en la circulación del agente, no será paralelo al vector V01 hasta que nuestro recipiente marca la velocidad inicial del accidente cerebrovascular. En este caso, la caída en la velocidad de la circulación compensa parcialmente. En muchos casos (por ejemplo, cuando se discrepancia con un propósito contador), debido a la caída en la velocidad de la observación de la nave en el turno de https://pandia.ru/TEXT/80/090/Images/Image016_68.gif "Ancho \u003d" 600 "altura \u003d" 369 "\u003e
1. El método del curso intermedio relativo.
Desde la colocación gráfica, se encuentra la esquina requerida del curso; Desde la tabla de elementos maniobrables en la esquina del tejido, el tiempo pasado por la embarcación a la vuelta, Tmman; un ángulo del curso intermedio y la natación del SPR intermedio; Desde el punto de la posición M1 del objetivo en el momento del inicio de la rotación se pospone durante el turno; Desde el final del vector hasta el lado, el curso intermedio inverso, la navegación intermedia del SPR se pospone; A través del inicio del vector SPR, se realiza un exploratorio en paralelo.
El método es preciso, pero consume mucho tiempo. Al resolver las tareas de discrepancias en el puente de la embarcación no se aplica. Se utiliza en parraselación de accidentes y como referencia al evaluar la precisión de los métodos aproximados.
2. El método del punto pre-punto condicional.
Oloda se lleva a cabo no desde la ubicación del punto M1 del objetivo en el momento del inicio de la maniobra, y desde el punto preventivo M, se refirió al LOD hacia adelante para el momento del instrumento de Tper. En la primera aproximación, la mitad del tiempo de rotación lleva la mitad del tiempo. Por lo tanto, con el método de tener en cuenta la circulación, la rotación del recipiente del observador comienza en el TPER ~ 0.5 TMAN antes de que el objetivo de la embarcación llega al punto desde el cual se realizó el mayor.
El método se aplica con mayor frecuencia en la práctica. Más preciso para los objetivos de contadores y menos precisos para los objetivos que siguen cursos convergentes. No es aplicable cuando se gira la alimentación del barco por satélite, ya que en este caso v0 \u003d 0 y con cualquier punto de TPR M y M1 coinciden.
3. Método de introducción de enmiendas a DZAD.
Como muestran los cálculos, cuando cambia el curso del barco observador, un ángulo de hasta 90 ° errores en el DZAD debido a la inercia de la rotación no excede el radio de circulación táctica. En ángulos grandes, la torneado alcanza el diámetro de la circulación. En este método, Dzadnakovata un margen al máximo de error posible de la circulación no aceptadora. Este método es el principal cuando se convierte debajo de la popa de un recipiente potencialmente peligroso, que es paralelo o casi un curso paralelo.
Enebridad contable cuando la velocidad de maniobra.
Las características e buques inerciales de acuerdo con las NASHS-82 se presentan en forma de un cronograma construido sobre una escala constante de distancias y teniendo una escala de valores de tiempo y velocidad. Al resolver las tareas de este capítulo, se supone que la información sobre las características de los frenos de inercia del recipiente con un desplazamiento de aproximadamente 10,000 toneladas (recipiente I) y recipiente con desplazamiento de aproximadamente 60,000 toneladas (buque II), dado en el Apéndice I .
Cuando la velocidad cambia por el recipiente, la ubicación relativa del objetivo se moverá a lo largo de una trayectoria curvilínea, cuya curvatura cuya curvatura está disminuyendo gradualmente a medida que su embarcación se libera a una nueva velocidad constante. Errores de inercia inaceptable Cuando la velocidad de maniobra puede llegar a varias millas de aquí la importancia de la contabilidad de inercia. Cuando la maniobra, la velocidad en el recipiente de gran tonelada, la nueva velocidad del barco observador se instala a través de docenas de minutos y todo este tiempo, el objetivo se mueve a lo largo de la curva lod, desde aquí la complejidad de la contabilidad de inercia.
La contabilidad de inercia es posible de las siguientes maneras.
1. El método para construir una curva exploratoria.
La trayectoria relativa del movimiento del recipiente se puede encontrar mediante la construcción de triángulos de viaje para intervalos de tiempo secuenciales T1, T2, ..., TN, después de la maniobra así (TI) \u003d SZ (TI) - SN (TI)
Para construir una curva Aldoor (Fig. 6):
desde el punto de la ubicación de Delhi en el momento del comienzo de la maniobra de nuestra embarcación, para pasar el objetivo del curso del curso y observar los segmentos en él pasable a través de ciertos intervalos de tiempo, por ejemplo, cada tres minutos ( puntos B1, B2, ..., BN); Desde los puntos de la BI para mantener las líneas hasta el lado, el curso inverso del barco observador, y para posponer los segmentos cubiertos por el observador de la embarcación durante el tiempo apropiado después de la maniobra (puntos C1, C2, ..., CN ) A través de los puntos CI para llevar a cabo la curva LOD y determinar DKR como la distancia más corta del centro de la tableta a la curva.

La razón es precisa y visual, pero de trabajo intensivo. Este método solo resuelve la tarea de predecir DKR NO a la maniobra seleccionada, pero el problema no se resuelve en encontrar el cambio requerido en la velocidad para discrepancias en una distancia dada. Para resolver problemas en las condiciones del puente no se aplica. Utilizado en la parraselación de accidentes, así como como referencia para estimar la precisión de la inercia aproximada.
2. El método de introducción de enmiendas a DZAD.
Si, como medida de la inercia del recipiente, adopte la característica de televisión (TV característico inercial es numéricamente igual a la velocidad de la mitad de la velocidad en Menevra Stop..gif "Ancho \u003d" 106 "altura \u003d" 24 src \u003d "\u003e . GIF "ancho \u003d" 67 "altura \u003d" 22 "\u003e. GIF" ancho \u003d "34" altura \u003d "22 src \u003d"\u003e no excede los 3 kb. En este caso, el DVAD se puede asignar a una reserva para el Error máximo posible. Este método puede ser el principal para los buques con desplazamiento a 1000 toneladas.
3. El método del punto de la premisa condicional (Fig. 7)
Al mismo tiempo, una nueva velocidad de velocidad establecida se pospone en el triángulo de velocidad en el triángulo de velocidad, pero la OLODA se lleva a cabo desde la ubicación del punto M1 del objetivo en el momento del comienzo de la maniobra, y desde la pre previa condicionada. -MP Point M, se refirió al Registro hacia adelante para el tiempo prematuro del TPER. En la primera aproximación, la mitad del tiempo para el cual se establece la nueva velocidad de su embarcación. Por lo tanto, con el método de tener en cuenta la inercia, el equipo de progreso se administra en TUPR ~ 0.5 TMAN antes de la embarcación, el objetivo es que el objetivo llega al punto en que se ha llevado a cabo más antiguos. Con la correcta elección del progreso, el progreso se mantendrá en la trayectoria de la señal de eco real.

En este caso, el método de tener en cuenta la inercia se cree condicionalmente que durante el TPER, se mantiene el recipiente de recipientes del barco anterior (mientras que la ruta viajada está exagerada), y después de la nueva velocidad de VN1 se instala instantáneamente (al mismo tiempo El camino pasó). Como se puede ver en la FIG. 8, el óptimo será óptimo para ser un tiempo de impacto, en el que la sobreestimación de la ruta viajada durante el TEPR se compensa por la subestimación posterior. Esto corresponde a la igualdad de áreas sombreadas en la FIG. ocho.

En la Fig. 9 Proporciona información sobre la elección del tiempo de ejecución óptimo según la maniobra seleccionada (VN1 / VN \u003d 0 - STOP, VN1 / VN \u003d 0.5 - MPH, etc.) y las características del TV inercia. Sobre la base de esta información al comienzo del vuelo, se puede compilar una tabla de trabajo del tiempo prematuro.

El recipiente tiene un TV característico inercial \u003d 4 y tiene la siguiente gradación de las tasas de PPH 14 UZ, SPK 10 UZ, MPH 8 UZ, SMPH 5 UZ. Haz una tabla de trabajo del tiempo de ejecución.
Pph - SPX. VN1 / VN \u003d 10: 14 \u003d 0.71. Desde el gráfico en la Fig. 9 TUPR / TV \u003d 0.8; TPR \u003d 0.8 * 4 \u003d 3.2 ~ 3 min. Habiendo calculado de manera similar para VN1 / VN \u003d 0.57; 0.3; 0, obtenemos la maniobra de la velocidad de velocidad desde el accidente cerebrovascular.
Smph, parada. |
|||
4. Modo de método.
En este caso, el método de incorporación de la inercia en el triángulo de velocidad no se pospone de una nueva velocidad de recipiente, y una velocidad promedio (equivalente) durante el inicio de la maniobra hasta la convergencia más corta  A través de los extremos de los vectores VCP y VC, se realiza el vector de la velocidad relativa central y el OLOODSR se realiza desde el punto M (Fig. 10). De hecho, la señal de eco se moverá a lo largo de la curva de línea ubicada entre el LOD y OLODSR CONVEX en la dirección de LOD, y en el punto de la convergencia más corta de las intersecciones de OLODSR.
A través de los extremos de los vectores VCP y VC, se realiza el vector de la velocidad relativa central y el OLOODSR se realiza desde el punto M (Fig. 10). De hecho, la señal de eco se moverá a lo largo de la curva de línea ubicada entre el LOD y OLODSR CONVEX en la dirección de LOD, y en el punto de la convergencia más corta de las intersecciones de OLODSR.

En la primera aproximación, el promedio de aritmética promedio entre Antiguo y Nuevo puede aceptarse como velocidad media.
![]()
Con un tiempo pequeño para el acercamiento más corto (), el error no supera el 10% de la liberación del barco cuando se libera.
Más precisamente, la velocidad promedio se puede encontrar a partir de la Tabla de contabilidad de inercia universal dada en el Apéndice 2. Uso de una tabla de contabilidad de inercia universal Considere en los ejemplos.
Encuentre la velocidad promedio del recipiente I durante desde el inicio de la maniobra del PPC - MPH hasta el acercamiento más corto si TKR \u003d 20 minutos.
Desde las tablas de las vías del freno del recipiente I (Apéndice 1) para la velocidad de 16, encontramos TV \u003d 4 min. En la tabla universal de contabilidad de inercia en la columna TV \u003d 4, encontramos el TKR \u003d 22 min más cercano y en la línea apropiada para la inversa 0.5 VN obtenemos el VSR / VN \u003d 0.6. La velocidad promedio se puede posponer en el triángulo de la velocidad por el ojo de 0.6 segmento VN o, si es necesario, se traduce en nodos VC \u003d 0.6 * 16 \u003d 9.6 UZ.
De acuerdo con los resultados de la junta de radar, se obtuvo que para discrepancias con el propósito de en la DVAD, es necesario tener VSR ~ 0.5VN. Oloodsr y VO Wed determinó el tiempo desde el comienzo de la maniobra a la convergencia más corta de TKR ~ 20 min. Características inerciales del TV de la vasija \u003d 8 min. ¿Qué velocidad de maniobra debe ser llevada a divergir en Dzad?
En la tabla universal de la contabilidad de inercias en la columna TV \u003d 8 min, encontramos TKR \u003d 19 min y en la línea correspondiente está buscando el valor de VCR más cercano. En este caso, VCR \u003d 0.5VN se encuentra en la columna STOP. Para discrepancias con el propósito de la DZAD, es necesario dar "parada". En la columna adyacente vemos que VT / VN \u003d 0.25, es decir, de hecho, en el momento en que la velocidad será de 0.25 Vn.
Apéndice 1A.
Recipiente I Desplazamiento de alrededor de 10,000 toneladas.
https://pandia.ru/text/80/090/Images/image033_47.gif "ancho \u003d" 423 "altura \u003d" 442 src \u003d "\u003e
Apéndice 2.
Tableta maniobrable
medios para la pequeña mecanización para la solución gráfica de problemas de maniobra en línea recta. Se utiliza tanto en maniobras de combate (ocupación de la posición para usar armas, acercamiento con miras a una distancia dada, evasiva de la reunión y otra tarea) y cuando discrepancia con los tribunales en el mar.
- - 1) Junta de Menzula, que sirve como mesa para dibujar al disparar; 2) una hoja de papel pegada en el Menzulu, el plan del área extraíble se aplica a los RY; 3) Una hoja separada de tarjeta topográfica ...
Diccionario Technical Ferrocarril
- - un dispositivo con una superficie plana especial y un dispositivo que indica las coordenadas de la imagen para su entrada en ...
Diccionario de explicación breve sobre impresión
- - Inglés: Régimen de maniobred El modo de operación de una central eléctrica con energía variable durante el intervalo de tiempo establecido Fuente: Términos y definiciones en la industria eléctrica ...
Diccionario de construcción
- - maniobrable, oh. Maniouver f. 1. REL. para maniobrar; destinado a ellos. Locomotora de vapor maniobrable. Bas-1. 2. Liderar sin fortificaciones a largo plazo. Sobre las operaciones militares. Guerra móvil. Defensa maniobrable. Bass-1 ...
Diccionario histórico de galicalismo idioma ruso
- - Masware y ...
- - Y ...
Diccionario orfográfico de la lengua rusa.
- - -CHO. 1. Hecho con el uso de maniobras, sin fortificaciones a largo plazo. Guerra móvil. 2. Causible para cambiar rápidamente la dirección del movimiento. M. crucero. Táctica maswarked. | Sud Meniavrosis, -I, esposas. ...
Diccionario explicativo de Ozhegov
-
Diccionario Explicativo UShakov
- - Maniobrable y maniobrable, maniobrable, maniobrable. Conduciendo sin fortificaciones a largo plazo; hormiga. POSICIONAL. Guerra móvil ...
Diccionario Explicativo UShakov
- - Maniobrable maniobrable, manual adj. 1. Hecho con el uso de maniobras, sin fortificaciones a largo plazo. 2. Poseer la capacidad de maniobrar 1 ....
Diccionario Explicativo Efremova
- - Arr. 1. Hecho con el uso de maniobras, sin fortificaciones a largo plazo. 2. Poseer la capacidad de maniobrar. // Contribuyendo al rápido cambio en la dirección del movimiento. 3. Constituir. Diseñado para maniobras ...
Diccionario Explicativo Efremova
- - Aya, uno. 1. Militar. Realizado con el amplio uso de la maniobra, sin fortificaciones a largo plazo; Antipla. POSICIONAL. Guerra móvil ...
Diccionario académico pequeño
- -; breve Formulario, -nna y mans "Eurahored; breve ...
Diccionario de ortografía ruso
- -; Guerra móvil ...
Énfasis verbal ruso
- - ...
Palabras de forma
- - Móvil, móvil; Turnando, alto, refrescante ...
Diccionario Eur
"Tableta maniobrable" en libros
Maniobrable "filin"
Desde el libro del genio "Fokke-Wulf". Gran tanque de Kurt Autor Azheliovich leonid lipmanovichManiobrable "Filin" Kurt Tank, convencido de darle a su inteligencia un nuevo nombre: "Filin". Philin está en la naturaleza más grande que los búhos y unas aves de presa mucho más terribles. Los columpios de sus alas superan los medidores de uno y medio. Los filins vuelan completamente en silencio, y lo más importante, poseen únicos
Piel amarilla de la tableta
Desde el libro "No llores de nosotros ..." Autor Kachaev yuri grigorievichLa tableta de cuero amarilla regresó a casa, Nina Elistratov descubrió que Yuri, junto con Murat y Leva Akimov, fue a la ciudad. El hijo dejó una nota sobre la mesa, ella se quedó sin palabras: "De la caza llegará tarde. No te preocupes ". Como decir, no te preocupes cuando ocho pronto, y con
Departamento de Baño: Tableta en las nubes.
Desde el libro de la computadora PDA N138 (01.10.2011-07.10.2011) Autor Composición "computerra"Departamento de Bañera: Tableta en Nubes Autor: Baths MikhaailOpublishibrados 05 de octubre de 2011. A finales de septiembre de 2011, Amazon presentó a todos los fabricantes de tabletas una buena píldora, o, más precisamente, una tableta. (¿De qué otra manera debes traducir la tableta de la palabra Aglitskoe?) En el papel
Computadora y tableta
Desde el libro siete habilidades de los padres efectivos: gestión de tiempo familiar, o cómo administrar todo. Libro de entrenamiento por heinz mariaCrees que la computadora y la tableta, entienden que las computadoras y las tabletas ingresaron en nuestras vidas en serio y durante mucho tiempo. No necesita ser un prunerador para notar las tendencias en el reemplazo de las tecnologías de papel antiguas interactivas. Oponerse a esta tendencia, no me importa qué resistir
Biplano maniobrable de alta velocidad - campo de batalla de avión
Desde el libro del avión de tormenta del Ejército Rojo. Volumen 1. Formación de la apariencia. Autor Perov Vladimir IlyichBiplano maniobrable de alta velocidad: un avión de campo de batalla en paralelo trabajando en la modificación de la aeronave de inteligencia en serie en aviones de ataque ligero y la creación de una "aeronave militar" entre algunas partes de los especialistas de la Fuerza Aérea del Ejército Rojo recibimos la extensión de la teoría de ataques
Tableta de coronel
Del libro del autor.La tableta del coronel frente a nosotros es revelaciones publicistas y poéticas: análisis operacional y bocetos con "naturaleza" ... los necesitamos para comprender nuestro pasado con la experiencia de hoy. Para recordarte con los jóvenes. Y además. Están interesados \u200b\u200ben el destino del autor - militar.
La tableta
Del libro Gran enciclopedia soviética (PL) Autor Bse.IFA 2010: Una vez que la tableta, dos tabletas Andrey escritas
Del libro Digital Magazine "Computerr" Número 33 Autor Composición "computerra"IFA 2010: Una vez que la tableta, dos tablet Andrei escrita publicadas Posteri Writing Tablet Computers exhibieron mucho tiempo antes de Apple iPad, pero con su aparición en su mundo, todo ha cambiado notablemente. Ahora, ante los desarrolladores, parece que salió de que la tableta no es
Elige una tableta moderna
Desde el libro de la computadora PDA N148 (12/03 / 2011-09.12.2011) Autor Composición "computerra"Elegimos una tableta moderna Publicado por: Oleg Nechazublished Diciembre 06 de diciembre de 2011 La aparición en el mercado de tabletas del iPad fue recibido por el público con deleite, muchos, sorprendentemente, todos los demás fabricantes de computadoras portátiles. El hecho es que las táctiles de la pantalla táctil en serie.
Departamento de Bañera: Tablet y Desktop
Desde el libro de la computadora PDA N137 (09/24 / 2011-30.09.2011) Autor Composición "computerra"Departamento de Bañera: Tablet and Desktop Autor: Baths Michaeloplishished el 27 de septiembre de 2011 Verano en estampado, principalmente norteamericano, nuevamente, hubo numerosos pronósticos para la tumba de la computadora personal de escritorio clásico. Criar k.
Del libro del autor.Período de guerra maniobrable - Operaciones en el frente alemán-austriaco: Galicia Battle y Operación de Prusia Oriental
Del libro del autor.Período de guerra maniobrable - Operaciones en el frente alemán-austriaco: Galicia Battle y Operación de Prusia Oriental
Del libro del autor.Período de guerra maniobrable de la guerra: operaciones en el frente alemán-austriaco: la batalla de Galicia y la operación de Prusia Oriental antes del primer viaje a Eastern Prusia, el gran príncipe Nikolai Nikolayevich declaró preparación para comenzar a avanzar en Berlín a cuatro ejércitos: los primeros dos primeros
Período de guerra maniobrable - Operaciones en el frente alemán-austriaco: Galicia Battle y Operación de Prusia Oriental
Del libro del autor.Modelo "Tablet"
Desde el libro un libro de libros, una reina decente de belleza. Autor Kriksunova inna abramovnaEl modelo de la tableta es una bolsa rígida en forma de un rectángulo estirado verticalmente. La bolsa de la tableta tiene una válvula voladora, que se pega total o parcialmente la bolsa, en la parte inferior de esta válvula es el bloqueo del cierre. Esta bolsa de modelo se usa durante mucho tiempo.
 Los dispositivos de iluminación basados \u200b\u200ben los LED de corriente alterna encuentran su nicho y pueden salir más allá de sus límites.
Los dispositivos de iluminación basados \u200b\u200ben los LED de corriente alterna encuentran su nicho y pueden salir más allá de sus límites.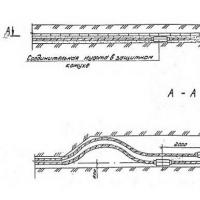 Requisitos y tarifas para la colocación del cable en el ámbito de la Tierra de la aplicación, las definiciones
Requisitos y tarifas para la colocación del cable en el ámbito de la Tierra de la aplicación, las definiciones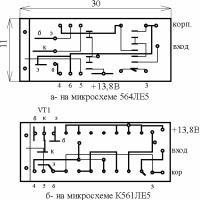 Stroboscopio de automóviles del puntero láser
Stroboscopio de automóviles del puntero láser Ordene 20 UAH a la cuenta. Cómo pedir prestado en MTS. Información adicional sobre el servicio.
Ordene 20 UAH a la cuenta. Cómo pedir prestado en MTS. Información adicional sobre el servicio. Cómo comprobar la reposición de la cuenta
Cómo comprobar la reposición de la cuenta ¿Cómo obtener un préstamo en TELE2?
¿Cómo obtener un préstamo en TELE2? Capacidad de respuesta SSD en un tablero en miniatura ¿Qué compra SSD Drive?
Capacidad de respuesta SSD en un tablero en miniatura ¿Qué compra SSD Drive?