Chápeme princípy prevádzky elektromotorov: výhody a nevýhody rôznych typov. Rozumieme v princípoch prevádzky elektromotorov: výhody a nevýhody rôznych typov štúdia DC elektromotora
Ak chcete vychutnať prezentácie prezentácie, vytvoriť si účet (účet) Google a prihláste sa na to: https://accounts.google.com
Podpisy pre diapozitívy:
Na obrázkoch určovať smer ampér sily, smer prúdu vo vodiči, smer magnetických siločiar, magnet pól. N s f \u003d 0 vyvolanie.
Laboratórne pracovné číslo 11 Štúdia elektrického motora DC (na modeli). Cieľom tejto práce je zoznámiť sa na elektrickom modeli jednosmerného motora s jeho prístrojom a práce. Nástroje a materiály: Model motora, Laboratórne napájanie, kľúč, pripojenie vodičov.
Bezpečnostné predpisy. Na stole by nemali byť žiadne cudzie predmety. Pozor! Elektrická energia! Izolácia vodičov by sa nemala rozbitá. Nezapínajte reťazec bez súhlasu učiteľa. Nedotýkajte sa ruky na rotujúce časti elektromotora. Dlhé vlasy musia byť odstránené tak, aby sa nedostali do rotujúcich častí motora. Po vykonaní práce, bude pracovisko dať do poriadku, reťazec sa rozbiť a rozobrať.
Postup vykonávania práce. 1. Sledujte model elektromotora. Uveďte na obrázku 1 hlavné časti. 1 2 3 4 5 1 Obrázok 1 - ______________________________ 2 - ______________________________ 3 - ______________________________________________________________________________________________________
2. Otvorte elektrický obvod pozostávajúci z aktuálneho zdroja, kľúča elektrického motora, kľúča, ktorý je možné postupne pripojiť. Nakreslite diagram reťazca.
3. Ukážte motor otáčať. Ak motor nefunguje, nájdite dôvody a odstráňte ich. 4. Zmeňte smer prúdu v reťazci. Sledujte otáčanie pohyblivého dielu elektromotora. 5. Obchodný výstup.
Literatúra: 1. Fyziky. 8 Cl.: Štúdie. Pre všeobecné vzdelávanie. Inštitúcie / A.V.Pernyshkin.-4. ed., Drabot.-m.: Drop, 2008. 2. Fyziky. 8 Cl.: Štúdie. Pre všeobecné vzdelávanie. Inštitúcie / N.S. Puryshev, N.E.Vazhevskaya -., 2. vydanie, stereotyp - M.: Drop 2008. 3. Laboratórne práce a kontrolné úlohy vo fyzike: notebook pre študentov 8. grade.-Saratov: Lyceum 2009. 4. Tetraffic pre prácu v laboratóriu. Sarakhman I.D. MOU SOPH No. 8 z Mozdok RSA-ALANIA. 5.Priasť práce v škole a domoch: Mechanika / V.F. SHEOV.-M.: Osvietenie, 2007. 6. Zberač úloh vo fyzike. 7-9 Triedy: Žiaci pre študentov. Inštitúcie / V.I. Lukashik, E.V. Ivanova. - 24. Ed.-m.: Osvietenie, 2010.
Náhľad:
Laboratórne pracovné číslo 11
(Na modeli)
práce
Nástroje a materiály
Pokroku.
Laboratórne pracovné číslo 11
Štúdium elektrického motora DC
(Na modeli)
práce : Zoznámte sa na model Motor DC s jeho zariadením a prácou.
Nástroje a materiály: Model motora, laboratórne napájanie, kľúč, spojovacie vodiče.
Bezpečnostné predpisy.
Na stole by nemali byť žiadne cudzie predmety. Pozor! Elektrická energia! Izolácia vodičov by sa nemala rozbitá. Nezapínajte reťazec bez súhlasu učiteľa. Nedotýkajte sa ruky na rotujúce časti elektromotora.
Úlohy a otázky odbornej prípravy
1. Aký fyzický jav je pôsobenie elektromotora?
2. Aké sú výhody elektrických motorov v porovnaní s tepelným?
3. Kde je elektrické motory DC?
Pokroku.
1. Sledujte model elektromotora. Uveďte na obrázku 1 hlavné časti.
2. Otvorte elektrický obvod pozostávajúci z aktuálneho zdroja, kľúča elektrického motora, kľúča, ktorý je možné postupne pripojiť. Nakreslite diagram reťazca.
Fig
Produkciu.
3. Ukážte motor otáčať. Ak motor nefunguje, nájdite dôvody a odstráňte ich.
4. Zmeňte smer prúdu v reťazci. Sledujte otáčanie pohyblivého dielu elektromotora.
Fig
aktuálne "Miesto lekcie v pracovnom programe: 55 lekcií, jedna z lekcií téme "elektromagnetických javov".
Účel lekcie: Vysvetlite zariadenie a princíp prevádzky elektromotora.
Úlohy:
preskúmajte elektromotor s použitím praktickej metódy - vykonávanie laboratórnych prác.
naučte sa uplatňovať poznatky získané v neštandardných situáciách na riešenie problémov;
pre rozvoj myslenia študentov pokračovať v rozvoji mentálnej analýzy, porovnania a syntézy.
pokračujte v tvorbe kognitívneho záujmu študentov.
Metodický cieľ:využívanie technológií na ukladanie zdravia vo fyzike.
Pracovné formuláre a aktivity v lekcii: Kontrola poznatkov s prihliadnutím na individuálne charakteristiky študentov; Laboratórne práce sa vykonáva v mikrogkupine (páry), aktualizácia znalostí študentov v hernom formulári; Vysvetlenie nového materiálu vo forme rozhovoru s demonštračné pokusmi, Goaling a reflexie.
Počas tried
1) Kontrola domácich úloh.
Nezávislá práca (viacúrovňová) sa vykonáva počas prvých 7 minút hodiny.
Úroveň 1.
2 úrovne.
3 úrovne.
2). Študovať nový materiál. (15 minút).
Učiteľ uvádza predmet hodiny, študenti tvoria cieľ.
Aktualizáciu poznatkov. Hra "áno" a "nie"
Učiteľ číta frázu, ak učeníci súhlasia s vyhlásením, že vstávajú, ak nie - sedia.
Magnetické pole je tvorené permanentnými magnetmi alebo úrazom elektrickým prúdom.
V prírode nie sú žiadne magnetické poplatky.
Južný pól magnetickej šípky označuje južný geografický pól zeme.
Elektromagnet sa nazýva cievka so železným jadrom vo vnútri.
Powerové vedenia magnetického poľa sú nasmerované zľava doprava.
Linky, ktoré sú inštalované magnetické šípy v magnetickom poli sa nazývajú magnetické čiary.
Načrtáva.
Magnetické pole akcie na vodiču s prúdom.
Závislosť smeru pohybu vodiča zo smeru prúdu v ňom a na mieste pólov magnetu.
Zariadenie a činnosť najjednoduchšieho elektromotora zberača.
Pohyb vodiča a rámu s prúdom v magnetickom poli.
Zariadenie a princíp prevádzky DC motora.
Bezpečnostné inštrukcie.
Práca sa vykonáva podľa opisu v učebnicovej knihe.
4Záverečná fáza hodiny.
Úloha. Dva elektrónové lúče sa odrazil a dva paralelné vodiče, pre ktoré je tok prúdu v jednom smere je priťahovaný. Prečo? Je možné vytvoriť podmienky, za ktorých budú tieto dirigenty odpudzované?
Odraz.
Čo sa nové naučili? Potrebujete tieto vedomosti v každodennom živote?
Otázky:
Čo závisí rýchlosť otáčania rotora v elektromotore?
Čo sa nazýva elektromotor?
Strhnúť . 61, aby sa krížovku na tému "elektromagnetických javov.
Aplikácia.
Úroveň 1.
1. Ako interaguje pestré a eponymné póly magnetov?
2. Je možné rezať magnet tak, že jeden zo získaných magnetov mal iba severný pól a druhý je iba South?
2 úrovne.
Prečo je kompas puzdro vyrobené z medi, hliníka, plastov a iných materiálov, ale nie vyžehliť?
Prečo leží oceľové koľajnice a pruhy na sklade, po určitom čase sa ukázali byť magnetizované?
3 úrovne.
1. Nakreslite magnetické pole magnetu podkovy a ukazujú smer elektrického vedenia.
2. Dva kolíky priťahovali južný pól magnetu. Prečo sú ich voľné konce odpudzujú?
Úroveň 1.
1. Ako interaguje pestré a eponymné póly magnetov?
2. Je možné rezať magnet tak, že jeden zo získaných magnetov mal iba severný pól a druhý je iba South?
2 úrovne.
Prečo je kompas puzdro vyrobené z medi, hliníka, plastov a iných materiálov, ale nie vyžehliť?
Prečo leží oceľové koľajnice a pruhy na sklade, po určitom čase sa ukázali byť magnetizované?
3 úrovne.
1. Nakreslite magnetické pole magnetu podkovy a ukazujú smer elektrického vedenia.
2. Dva kolíky priťahovali južný pól magnetu. Prečo sú ich voľné konce odpudzujú?
MKOU "ALLAK SCHOOL"
Otvorte lekciu fyziky v triede 8 na tému " Magnetické pole akcie na vodiču s prúdom. Elektrický motor. Laboratórne pracovné číslo 9 "Štúdium elektrického motora trvalého prúd.
Pripravené a držané: Učiteľ prvej kategórie Taranshenko Elizabeth Aleksandrovna.
študovať zariadenie, princíp prevádzky, charakteristiky DC motora;
nákup praktického štartu, prevádzky, prevádzky a zastavenie elektromotora DC;
experimentálne preskúmať teoretické informácie o vlastnostiach DC elektromotora.
Hlavné teoretické ustanovenia
DC MOTOR je elektrický stroj určený na transformáciu elektrickej energie do mechanických.
Zariadenie DC motora nemá rozdiely od generátora DC. Táto okolnosť robí elektrické jednosmerné stroje reverzibilné, to znamená, že im umožňuje byť použitý ako v generátora a v režimoch motora. Konštrukčný motor DC má pevné a pohyblivé prvky, ktoré sú znázornené na obr. jeden.
Pevná časť je stator 1 (lôžko) z oceľového odliatku, sa skladá z hlavnej 2 a ďalších 3 póly s budením vinutiami 4 a 5 a štetcom prejdite s kefami. Stator vykonáva funkciu magnetického potrubia. Pomocou hlavných pólov je konštantná v čase a magnetické pole upevnené vo vesmíre. Medzi hlavné póly a zlepšujú podmienky spínania.
Hmotnou časťou elektromotora DC je rotor 6 (kotva), ktorý je umiestnený na otočnom hriadeli. Kotva tiež hrá úlohu magnetického potrubia. Je diagnostikovaná z tenkých, elektricky izolovaných od seba, tenké plechy elektrickej ocele so zvýšeným obsahom kremíka, ktorý znižuje stratu energie. V drážkach, kotvy lisované vinutie 7, ktorých výsledky, ktoré sú spojené s zberných dosiek 8, umiestnených na rovnakom motora (viď obr. 1).
Zvážte zásadu prevádzky elektromotora DC. Pripojenie konštantného napätia k svorky elektrického stroja spôsobuje simultánny vzhľad v excitačných vinutiach (stator) av aktuálnych kotviace vinutia (obr. 2). V dôsledku interakcie aktuálnej kotvy s magnetickým prúdom, vzniká vytvorená excitácia vinutia v statori f.Stanovené zákonom AMPER . Smer tejto sily je určený pravidlom ľavej ruky (obr. 2), podľa ktorého je orientovaná kolmo na obidva prúdy i.(v kotvovom vinutí) a vektor magnetickej indukcie V(Vytvorené vzrušenie). V dôsledku toho sa na rotore pôsobí pár síl (obr. 2). Na hornej časti rotora, sila pôsobí doprava, vľavo hore. Tento pár sily vytvára krútiaci moment, pod činnosťou, ktorej je kotva poháňaná do otáčania. Veľkosť vznikajúceho elektromagnetického momentu sa ukáže, že je rovnaká
M. = c. M. I. Ja F.,
kde z M - koeficient v závislosti od konštrukcie kotviaceho vinutia a počtu elektrických motorových pólov; F.- magnetický prúd jedného páru hlavných pólov elektromotora; I. I - aktuálny kotvový motor. Z obr. 2, obrat vinutí kotvy je sprevádzaná súčasnou zmenou polarity na kolektívnych platniach. Súčasný smer v odbočení navíjania kotvy sa líši na opačnú, ale magnetický tok excitačných vinutí si zachováva bývalý smer, ktorý spôsobuje invaring smerovania síl f.A preto rotačný moment.
Rotácia kotvy v magnetickom poli vedie k vzniku EMF vo svojom vinutí, ktorej smer je určený pravidlom pravej ruky. Výsledkom je, že prezentované na obr. 2 Konfigurácie polí a síl v kotvovom vinutí vznikajú indukčný prúd zameraný oproti hlavnému prúdu. Vznikajúce EMF sa preto nazývajú anti-eds. Veľkosť je rovnaká
E. = z E. nf,
kde n.- frekvencia otáčania kotvy elektromotora; z E je koeficient v závislosti od konštrukčných prvkov stroja. Tento EMF zhoršuje prevádzkové charakteristiky elektromotora.
Súčasná kotva vytvára magnetické pole, ktoré ovplyvňuje magnetické pole hlavných pólov (statora), ktorý sa nazýva kotvová reakcia. V režime voľnobehu je magnetické pole vytvorené iba hlavné póly. Toto pole je symetricky vzhľadom na osi týchto pólov a koaxiálne s nimi. Po pripojení k nosnému motoru na úkor prúdu v navíjaní kotvy sa vytvorí magnetické pole - kotviace pole. Os tejto oblasti bude kolmá na os hlavných pólov. Keďže pri rotujúcej kotve, súčasná distribúcia v vodičoch kotvy zostáva nezmenená, pole kotvy zostáva fixovaná vo vesmíre. Pridanie tejto oblasti s oblasťou hlavných pólov dáva výsledné pole, ktoré sa rozvíja v uhle proti smeru otáčania kotvy. V dôsledku toho klesá krútiaci moment, pretože časť vodičov spadá do zóny pólu opačnej polarity a vytvára brzdný bod. V tomto prípade sa stávajú kefy a predbiehanie kolektora, nastáva pozdĺžne demagnetizačné pole.

Aby sa znížil účinok kotvy odozvy, v ňom sú vložené ďalšie póly. Vinutia takýchto pólov sú zahrnuté postupne s hlavným vinutím kotvy, ale zmena smeru vinutia v nich spôsobuje vzhľad magnetického poľa namiereného proti magnetickému poľu kotvy.
Ak chcete zmeniť smer otáčania motora DC, je potrebné zmeniť polaritu napätia, zhrnúť sa do kotvy alebo excitačného vinutia.
V závislosti od spôsobu začlenenia excitačného vinutia sa rozlišujú DC elektromotory s paralelnou, sekvenčnou a zmiešanou excitáciou.
V motoroch s paralelnou excitáciou je navíjanie navrhnuté pre plné napätie sieťovej siete a zapne rovnobežne s reťazec kotvy (obr. 3).
Sekvenčný excitačný motor má excitačné vinutie, ktoré je zapnuté konzistentne s kotvou, takže toto vinutie sa vypočíta pre kompletný kotvový prúd (obr. 4).
Zmiešané excitačné motory majú dve vinutia, jeden sa obráti paralelne, druhý je postupne s kotvou (obr. 5).

Obr. 3 Obr. štyri
Keď štart Elektrické motory DC (bez ohľadu na metódu excitácie), existujú významné odpaľovacie zariadenia, ktoré môžu viesť k ich zlyhaniu. K tomu dochádza v dôsledku pridelenia významného množstva tepla pri vinutí kotvy a následné narušenie jeho izolácie. Preto sa štart DC motorov vykonáva špeciálne štartovacie zariadenia. Vo väčšine prípadov sa na tieto účely používa najjednoduchšie štartovacie zariadenie - Launcher. Proces spustenia DC motora s odpaľovačom je znázornený v príklade DC motora s paralelnou excitáciou.
Na základe rovnice zloženej v súlade s druhým zákonom Kirchoff pre ľavú stranu elektrického obvodu (pozri obr. 3), spúšťač je úplne odstránený ( R.Štart \u003d 0), aktuálna kotva
 ,
,
kde U.- napätie dodávané do elektromotora; R. Som kotvový navíjací odpor.
V počiatočnom okamihu spustenia elektromotora, rýchlosť otáčania kotvy n.\u003d 0, preto je antibelektro-pohybujúca sa sila, vložená do zakotvenia vinutia, v súlade s predtým získanou expresiou tiež nula ( E.= 0).
Odolnosť voči navíjacej kotve R. Som dosť malá hodnota. Aby bolo možné ho obmedziť v rovnakom čase, je neprijateľne vysoký prúd v kotvovom reťazci, keď sa spustí, konzistentne s kotvou, bez ohľadu na metódu vzrušenia motora otočí na spúšťač (počiatočný odpor R. štart). V tomto prípade spúšťač kotvy
 .
.
Spúšťací odpor R. Začnite počítajte na prácu len na počiatočný čas a zvolený takým spôsobom, že východiskový prúd kotvy elektromotora neprekročila prípustnú hodnotu ( I. Začal som 2 I. I, číslo). Ako elektrický motor EDC sa zrýchlil v kotvovom vinutí, v dôsledku rastúcej frekvencie otáčania n zvyšuje ( E.=z E. nf). V dôsledku toho sa kotdový prúd zníži na iných miestach. V tomto prípade je odpor spúšťača R. spustiť Keďže elektrická kotva je pretaktovaná, je potrebné postupne znižovať. Po skončení pretaktovania motora na menovitú hodnotu rýchlosti otáčania sa kotva EDC zvyšuje natoľko, že počiatočná odolnosť môže byť znížená na nulu, bez nebezpečenstva významného zvýšenia kotviaceho prúdu.
Spustenie odolnosti R. Štart v reťazovom kotve je potrebná len pri spustení. V procese normálnej prevádzky elektromotora musí byť odpojený, najprv, pretože je určený na krátkodobú prevádzku počas spustenia, po druhé, v prítomnosti počiatočnej odolnosti, tepelná strata energie sa v ňom vyskytne, rovný R. spustiť I. 2 I, výrazne znižuje účinnosť elektromotora.

 .
.
Berúc do úvahy výraz pre EMF ( E.=z E. nf), Písanie výsledného vzorec vzhľadom na frekvenciu otáčania získame frekvenčnú rovnicu (vysokorýchlostné) charakteristiky elektromotora n.(I. I):
 .
.
Z toho vyplýva, že v neprítomnosti zaťaženia na hriadeli a aktuálnu kotvu I. Ja = 0 Frekvencia otáčania elektromotora s touto hodnotou napájacieho napätia
 .
.
Frekvencia otáčania elektromotora n. 0 je to frekvencia otáčania dokonalého voľnobehu. Okrem parametrov elektromotora závisí aj od hodnoty napájacieho napätia a magnetického toku. S poklesom magnetického toku, s inými vecami, ktoré sú rovnaké, rýchlosť otáčania perfektného zdvihu nečinnosti sa zvyšuje. Preto v prípade útesu excitačného reťazca, keď sa excitačný prúd stáva nulovou ( I. B \u003d 0), magnetický tok motora sa zmenší na hodnotu, ktorá sa rovná hodnote zvyšného magnetického toku F. OST. V rovnakej dobe, motor "ide do šírenia", ktorý sa vyvíja rýchlosť rotácie, je oveľa viac nominálnych, čo predstavuje určité nebezpečenstvo pre motor a pre servisný personál.
Frekvenčné (vysokorýchlostné) charakteristiky DC motora s paralelnou excitáciou n.(I. I) s konštantnou hodnotou magnetického toku F.=const.a konštantná hodnota napájacieho napätia U \u003d const.má formu priamych (Obr. 6).

Vyjadrenie v rovniciach frekvenčných charakteristík kotviaceho prúdu cez elektromagnetický moment motora M \u003dz M. I. Ja F., Získame rovnicu mechanických charakteristík, t.j. závislosť n.(M.) Ako U \u003d const.pre motory s paralelnou excitáciou:
 .
.
Zanedbávanie účinku kotviacej reakcie v procese výmeny zaťaženia, môžete si vziať elektromagnetický moment motora v proporcionálnom kotvovom prúde. Preto mechanické vlastnosti DC motorov majú rovnakú formu ako zodpovedajúce frekvenčné charakteristiky. Elektromotor s paralelnou excitáciou má tuhú mechanickú charakteristiku (obr. 7). Z tejto charakteristiky je možné vidieť, že jeho rýchlosť otáčania so zvýšením zaťaženia sa mierne zníži, pretože excitačný prúd s rovnobežným otáčaním excitačného vinutia, a teda magnetický tokom motora zostáva takmer nezmenený a Odolnosť reťazca kotvy je relatívne malý.

Prevádzkové charakteristiky elektromotora DC s paralelnou excitáciou sú znázornené na obr. 8. Z týchto charakteristík je možné vidieť, že frekvencia rotácie n.elektromotory s paralelnou excitáciou s nárastom zaťaženia sa trochu znižuje. Závislosť užitočného krútiaceho momentu na hriadeli motora z výkonu Ročník 2 je to takmer priamka, pretože okamih tohto motora je úmerný zaťaženiu na hriadeli: M.=krútiť sa 2 / n.. Zakrivením tejto závislosti je vysvetlené určitým znížením frekvencie otáčania so zvýšením zaťaženia.
Pre Ročník 2 \u003d 0 prúd spotrebovaný elektromotorom sa rovná nečinnému prúdu. S rastúcim výkonom sa kotvový prúd zvyšuje približne o rovnakú závislosť, pretože zadaná moment na hriadeli F.=const.aktuálna kotva je úmerná momentom zaťaženia. Účinnosť elektromotora je určená ako pomer užitočného výkonu na hriadeli s výkonom spotrebovaným zo siete:
 ,
,
kde Ročník 2 - užitočný výkon na hriadeli; Ročník 1 =Ui- výkon spotrebovaný elektromotorom z napájania; Ročník Ey \u003d. I. 2 I. R. Som elektrické straty s energiou v kotvovom reťazci, Ročník Ev \u003d. Ui v, \u003d. I. 2 B. R. v - elektrická strata energie v excitálnom okruhu; Ročník kožušina - mechanická strata výkonu; Ročník M - Strata energie o hysterézii a vírových prúdoch.


S konštantným napätím sieťovej siete a konštantným magnetickým prúdom v procese výmeny hodnoty rezistencie kotviaceho reťazca sa môže získať napríklad rodina mechanických vlastností, napríklad pre elektromotor s paralelnou excitáciou (obr. 9 ).
Výhodou uvažovanej metódy regulácie leží vo svojej relatívnej jednoduchosti a možnosť získania hladkej zmeny rýchlosti otáčania široko (od nuly na menovitú hodnotu frekvencie n. číslo). Nevýhody tejto metódy zahŕňajú skutočnosť, že existujú významné straty s výkonom pri pridávaní odolnosti rastúce s poklesom rýchlosti otáčania, ako aj potreba používať ďalšie regulačné zariadenia. Okrem toho táto metóda neumožňuje nastaviť frekvenciu otáčania elektromotora z jeho menovitej hodnoty.
Zmeny na frekvenciu otáčania motora DC je možné dosiahnuť a v dôsledku zmeny hodnoty magnetického toku excitácie. So zmenou magnetického toku podľa rovnice frekvenčnej odozvy pre DC motory s paralelnou excitáciou, s konštantnou hodnotou napájacieho napätia a odporu kotviaceho reťazca, môžu sa získať mechanické vlastnosti uvedené na obrázku. 10.

Nevýhody tejto metódy zahŕňajú relatívne malý rozsah regulácie v dôsledku prítomnosti obmedzení na mechanickej pevnosti a spínaní elektromotora. Výhodou tohto spôsobu regulácie je jeho jednoduchosť. Pre motory s paralelnou excitáciou sa to dosiahne zmenou odolnosti nastavenia R. ročník v excitálnom okruhu.
V jednosmerných prúdových motoroch s postupnou excitáciou sa zmena magnetického toku dosahuje posunutím excitačného vinutia s odporom, ktorý má zodpovedajúcu hodnotu, alebo zatvorením korenia určitého počtu otáčok excitačného vinutia.
Rozšírené použitie, najmä v elektrických pohonoch postavených generátorom - motorom, dostal metódu na reguláciu otáčania otáčania zmenou napätia na kotevných klipoch motora. S konštantným magnetickým prietokom a odporom kotviacej reťaze v dôsledku zmeny napätia sa môže získať rodina frekvenčných charakteristík.

So zmenou napájacieho napätia, rýchlosť otáčania perfektného nečinnosti n 0 V súlade s predtým zníženou expresiou sa mení úmerný napätiu. Keďže odpor reťazca kotvy zostáva nezmenený, tuhosť mechanických charakteristík sa nelíši od tuhosti prirodzenej mechanickej charakteristiky, keď U.=U. žiadne M.
Výhodou uvažovanej metódy regulácie je široká škála zmien otáčok bez zvýšenia výkonových strát. Nevýhody tejto metódy zahŕňajú skutočnosť, že je potrebný zdroj nastaviteľného napájacieho napätia, čo vedie k zvýšte hmotnosť, rozmery a náklady na inštaláciu.
Elektromotory sú zariadenia, v ktorých sa elektrická energia zmení na mechanické. Princípom ich pôsobenia je fenoménom elektromagnetickej indukcie.
Metódy interakcie magnetických polí nútením rotora motora sa však výrazne líšia v závislosti od typu napájacieho napätia - striedavé alebo trvalé.
Princíp prevádzky DC elektromotora je účinok odpudzovania rovnakých názvových pólov permanentných magnetov a priťahuje viacrozmerné. Prioritou vynálezu patrí ruským inžinierom B. S. Yakobi. Prvý priemyselný model DC motora bol vytvorený v roku 1838. Odvtedy, jeho dizajn nestúpil zásadné zmeny.
V DC motoroch s nízkym výkonom je jeden z magnetov fyzicky existujúci. Je upevnený priamo na kryte stroja. Druhý je vytvorený v zakotvení po pripojení zdroja DC. Ak to chcete urobiť, použite špeciálne zariadenie - uzol zberača. Samotný zberateľ je vodivý krúžok, upevnený na hriadeli motora. Konce vinutia kotvy sú pripojené k nemu.
K krútiacemu momentu je potrebné nepretržite zmeniť pól s permanentným magnetovým kotvam. To by sa malo vyskytnúť v čase križovatky tzv. Magnetického neutrálu. Konštruktívne, takáto úloha rieši rozdelenie kolektorového krúžku do sektorov oddelených dielektrickými doskami. Konce vinutí kotiev sa k nim spájajú striedavo.
Na pripojenie kolektora s prívodnou sieťou sa takzvané kefy používajú - grafitové tyče s vysokou elektrickou vodivosťou a malým klzným koeficientom trenia.Kotviace vinutia nie sú pripojené k sieťovej sieti a pomocou uzla zberača je pripojený k štartovaciemu riadku. Proces začlenenia takéhoto motora sa skladá zo zlúčeniny so sieťovou sieťou a postupným poklesom na nulu aktívneho odporu v kotvovom reťazci. Elektromotor je zapnutý hladko a bez preťaženia.
Vlastnosti použitia asynchrónnych motorov v jednofázovom reťazci
 Napriek tomu, že rotujúce magnetické pole statora je najjednoduchší spôsob, ako získať z trojfázového napätia, princíp pôsobenia asynchrónneho elektromotora umožňuje pracovať na jednej fáze, sieti pre domácnosť, ak budú niektoré zmeny na ich dizajne.
Napriek tomu, že rotujúce magnetické pole statora je najjednoduchší spôsob, ako získať z trojfázového napätia, princíp pôsobenia asynchrónneho elektromotora umožňuje pracovať na jednej fáze, sieti pre domácnosť, ak budú niektoré zmeny na ich dizajne.
Na tento účel musia byť na statorovi dve vinutia, z ktorých jeden je "Spustenie". Súčasný v ňom je posunutý vo fáze o 90 ° v dôsledku zahrnutia v reťazci reaktívneho zaťaženia. Najčastejšie
Prakticky úplná synchronicita magnetických polí umožňuje motoru získať hybnosť aj s významným zaťažením na hriadeli, ktorý je potrebný na prevádzku vrtákov, perforátorov, vysávačov, "Bulharov" alebo Polywood Stroje.
Ak je aktivovaný riadený okruh takéhoto motora, frekvencia jeho otáčania sa môže hladko zmeniť. Ale smer, keď výživa z sieťového okruhu, nikdy nebude môcť zmeniť.
Takéto elektromotory sú schopné vyvinúť veľmi vysoké otáčky, kompaktné a majú väčší krútiaci moment. Avšak, prítomnosť uzla zberača-kefy znižuje ich motitu, ktorá je expanzia - grafitové kefy sa rýchlo nevybratia pri vysokých otáčkach, najmä ak zberač má mechanické poškodenie.Elektromotory majú najväčšiu účinnosť (viac ako 80%) všetkých zariadení vytvorených človekom. Ich vynález na konci storočia XIX môže byť považovaný za vysoko kvalitnú civilizačnú skok, pretože bez nich nie je možné prezentovať život modernej spoločnosti založenej na vysokých technológiách a niečo efektívnejšie nie je vynájdené.
Synchrónny princíp prevádzky elektromotora
1. Cieľ: Preskúmajte vlastnosti spustenia, mechanické vlastnosti a spôsoby regulácie frekvencie otáčania DC motora so zmiešanou excitáciou.
Prijatie.
2.1. Nezávislej práce:
Preskúmajte konštrukčné funkcie, diaľkové ovládanie DC;
Študovať metodiku na získanie mechanických vlastností DC motora;
Oboznámte sa s vlastnosťami počiatočného a regulácie frekvencie otáčania DC motora;
Nakreslite pojmy na meranie odporov kotviaceho reťazca a excitačných vinutí (obr .6.4) a skúšky motora (obr. 6.2);
Použitie obr. 6.2 a 6.3 Urobte montážnu schému;
Nakreslite formy tabuliek 6.1 ... 6.4;
Pripravte si ústne odpovede na kontrolu otázok.
2.2. Pracovať v laboratóriu:
Oboznámte sa s laboratórnou inštaláciou;
Záznam v tabuľke 6.1. Údaje o pase motora;
Merať odpor reťazca kotvy a vinutia excitácie. Údaje sa zaznamenávajú v tabuľke 6.1;
Zbierajte schému a vykonávať výskum motora, písať údaje do tabuľky 6.2, 6.3, 6.4;
Vytvorte prirodzenú mechanickú charakteristiku n \u003d f (m) a vysokorýchlostné vlastnosti n \u003d f (I b) a n \u003d f (u);
Urobte závery na základe výsledkov štúdie.
Všeobecne.
DC Motors Na rozdiel od striedavých motorov (primárne asynchrónne) majú väčší rozmanitosť štartovacieho krútiaceho momentu a preťaženia, poskytujú plynulú kontrolu otáčania pracovného stroja. Preto sa používajú na poháňanie strojov a mechanizmov s ťažkými podmienkami spustenia (napríklad ako štartéry vo vnútorných spaľovacích motoroch), ako aj v prípade potreby regulujúce rýchlosť otáčania vo vysokých limitoch (mechanizmy strojového nástroja, stojany na orezané brzdy, elektrifikované vozidlá).
Konštrukčne, motor sa skladá z pevnej zostavy (induktora) a rotačného uzla (kotva). Na chov magnetickom obvode induktora sa nachádzajú excitačné vinutia. V motore zmiešanej excitácie existujú dva z nich: paralelne s závermi W 1 a C2 a sekvenčnými závermi C1 a C2 (obr. 6.2). Odolnosť paralelného vinutia R OV je v závislosti od výkonu motora z niekoľkých desiatok na stovky. Je vyrobený z malého prierezu s veľkým počtom otáčok. Sekvenčné vinutie má malý odpor R OBC (zvyčajne z niekoľkých Ohm do podielu OHM), pretože Pozostáva z malého počtu otáčok veľkého prierezu. Induktor slúži na vytvorenie magnetického toku excitácie, keď je poháňané vinutia.
Vinutie kotvy sa umiestni do drážok magnetického potrubia a je odstránený na kolektore. S pomocou kefiek sú jeho závery i i a I 2 pripojené k zdroju DC. Odolnosť voči navíjaniu kotvy R Som malý (OMMS alebo podiel Ohm).
Otočný moment m motora DC sa vytvorí, keď interakcia kotvy i s magnetickým tokom F:
M \u003d K × IIA × F, (6.1)
kde K je trvalý koeficient v závislosti od konštrukcie motora.
Pri otáčaní kotvy sa navíjanie prechádza magnetickým tokom excitácie a EDC E je indukovaný, úmerný frekvencii otáčania N:
E \u003d C × N × F, (6.2)
kde C je trvalý koeficient v závislosti od konštrukcie motora.
Prúd v reťazci kotvy:
I \u003d (U-E) / (R + R OaT) \u003d (U-S × N × F) / (R I + R OaT), (6.3)
Riešenie výrazov 6.1 a 6.3 v porovnaní s P, nájdite analytickú expresiu mechanických charakteristík motora n \u003d f (m). Jeho grafický obrázok je znázornený na obrázku 6.1.
Obr. 6.1. Mechanické vlastnosti DC motora zmiešanej excitácie
Bod A zodpovedá prevádzke motora vo frekvencii otáčania n. S zvýšením mechanického zaťaženia sa zníži rýchlosť otáčania a krútiaci moment sa zvyšuje, siahajúc v mieste menovitej hodnoty M H. V pozemku lietadla motor pracuje s preťažením. Súčasný I je väčší ako nominálna hodnota, ktorá vedie k rýchlemu vykurovaniu vinutí kotvy a ABS, zvyšuje iskru na kolektore. Maximálny moment M M M (bod c) je obmedzený podmienkami rozdeľovača a mechanickej pevnosti motora.
Pokračovanie mechanickej charakteristiky pred križovatkou v bode D "S osou krútiaceho momentu, dostaneme hodnotu východiskového bodu s priamym zapnutím motora do siete. EMF E je nula a prúd v kotvovom reťazci V súlade so vzorcom 6.3 sa prudko zvyšuje.
Aby ste zmenšili štart prúd, v sérii, obvod armatúry obsahuje RX Launcher (obr. 6.2) s odporom:
RX \u003d U H / (1.3 ... 2.5) × I n. - (R I - R OBC), (6.4)
kde u h je menovitým napätím siete;
I ya.n. - nominálny kotvový prúd.
Znížený kotvový prúd na (1,3 ... 2,5) × i n. Poskytuje dostatočný počiatočný východiskový bod top (bod d). Keď sa motor zrýchlil, rezistencia RX sa znižuje na nulu, pričom sa udržiava približne konštantný MP (sekcia SD).
Reostat Rb V okruhu paralelného excitačného vinutia (obr. 6.2) Umožňuje nastaviť hodnotu magnetického toku F (Formula 6.1). Pred začatím motora sa úplne zobrazí, aby sa dosiahol potrebný štartovací moment s minimálnym kotvovým prúdom.
Použitie vzorca 6.3 definujeme frekvenciu otáčania motora
n \u003d (U - I (R I + R OBC + RX)) / (s F), (6.5)
v ktorom R I, R OBC a C sú konštantné hodnoty a u, i i a f je možné zmeniť. Nasleduje tri možné spôsoby regulovania otáčok motora:
Zmena hodnoty napájacieho napätia;
Zmena hodnôt kotviaceho prúdu pomocou RX nastavenia RX, ktorý sa na rozdiel od spúšťača vypočíta na kontinuálny prevádzkový režim;
Zmenou magnetického toku excitácie F, ktorá je úmerná prúdu v vinutiach alebo ABS. V paralelnom vinutí môže byť nastavený Rb na Rb. Odolnosť Rb sa odoberie v závislosti od požadovaných limitov regulácie otáčania rotačnej rýchlosti Rb \u003d (2 ... 5) r obsh.
Passová doska motora označuje menovitú frekvenciu otáčania, ktorá zodpovedá menovitému výkonu hriadeľa motora pri menovitom napätí siete a odhalených odporov RX a Rb.
 Magnetometria v najjednoduchšej verzii Ferrozond sa skladá z feromagnetického jadra a dvoch cievok na ňom
Magnetometria v najjednoduchšej verzii Ferrozond sa skladá z feromagnetického jadra a dvoch cievok na ňom Efektívny hľadaný kurz práce
Efektívny hľadaný kurz práce Hlavné charakteristiky a parametre fotodiódy
Hlavné charakteristiky a parametre fotodiódy Ako upraviť PDF (päť aplikácií na zmenu súborov PDF) Ako odstrániť jednotlivé stránky z PDF
Ako upraviť PDF (päť aplikácií na zmenu súborov PDF) Ako odstrániť jednotlivé stránky z PDF Prečo sa okno vystreleného programu dlho rozvíjalo?
Prečo sa okno vystreleného programu dlho rozvíjalo? DXF2TXT - Export a preklad textu od AutoCADu na zobrazenie bodu DWG Traffic v txt
DXF2TXT - Export a preklad textu od AutoCADu na zobrazenie bodu DWG Traffic v txt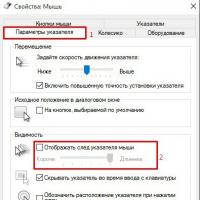 Čo robiť, ak kurzor myši zmizne
Čo robiť, ak kurzor myši zmizne