Tacómetro LED Hazlo tú mismo. Cómo conectar un tacómetro en un motor diesel. ¿Dónde se lleva el tacómetro de la señal en el motor diesel?
Una persona con una tarea más bien no estándar se convirtió en Hace una semana, fue necesario garantizar el trabajo del antiguo tacómetro TX-193 (VAZ 2106) con el moderno motor VAZ21126 (antes), que tiene un sistema de ignición con individuo Bobinas para cada cilindro y, por lo tanto, simplemente conecte TX-193, no funcionará para la bobina de ignición. Al final, el cliente quería mejorar el rendimiento del dispositivo, dejando su apariencia y diseño no tocado. En general, terminó en el hecho de que tomé para cumplir con el relleno electrónico del dispositivo y desarrollar mi propio, con blackjack y putas. La información sobre la velocidad de rotación del tacómetro del cigüeñal ahora recibirá de la ECU de 7 de enero, por lo que hay una conclusión especial en este último.
Bajo la foto, el video, el esquema, la fuente y un montón de texto que informan sobre logaritmos y cómo escalar adecuadamente los datos y deshacerse de la coma.
Difícil
Vamos a empezar con el dispositivo TX-193. La parte mecánica del dispositivo es un milamímetro de diseño clásico, con un imán permanente y una bobina móvil, lo que lleva a mover la flecha.
Para desarrollar un esquema en esencia, fue suficiente saber sobre el Milliamímetro solo que, a una corriente del orden de 10 mA, la flecha se desvía al límite, y la resistencia al bobinado es de aproximadamente 180. Como cerebro, se eligió el controlador Attiny2313A ATTMY2313A ATTMY2313A, táctil de un resonador de cuarzo externo a 16 MHz. La comida del dispositivo se lleva a cabo desde la red a bordo del automóvil, lo que significa de acuerdo con GOST, debe soportar la "barba" a 100V y opere de manera constante en el rango de 9-15V. Debido al consumo menor (varias decenas de millones de personas por), se decidió usar un estabilizador lineal 7805 con un filtro inductivo y un supresión para la protección contra la interferencia pulsada. El dispositivo estaba pasando de lo que estaba a la mano, por lo que se usa una versión poderosa de 7805 en el producto terminado, aunque sería suficiente 78L05 a 100 mA.
El controlador del controlador administra el Milliammetro, naturalmente usando PWM. Para el cual un temporizador de descarga de 16 bits está involucrado en el modo PWM de fase y frecuencia correcta.
La información sobre la frecuencia de rotación del cigüeñal se transmite desde la ECU en forma de pulsos de 0 - 12V. El nivel activo es bajo. 2 impulsos para 1 rotación de cigüeñal. Para la captura de estos pulsos, se usa una interrupción externa de INT0 y la cadena correspondiente desde el filtro RC, los tirantes y los diodos de protección. En general, el circuito del dispositivo es bastante típico y me sorprendió encontrar que acabo de escribir mucho sobre ella. Pero sí, no juzgues estrictamente, el primer artículo sigue siendo. 
El dispositivo ensamblado sin dial ahora se ve así: 
Suave
De hecho, antes de dibujar un esquema, me reuní rápidamente en el diseño, tomando el controlador en la estuche de inmersión e inmediatamente comenzó a agitar la flecha))
En general, el software resultó ser un poco más interesante que duro.
Vamos a empezar con la arquitectura general:
Temporizador 0 Ticks con una frecuencia de 250 kHz, lo que significa que el período de desbordamiento de interrupción de Tick \u003d 4μs ocurre con una frecuencia de 250kgz / 256 \u003d 0.976 kHz
Así que la interrupción ocurre una vez en 1024mks. Fue posible congelar y ajustar este negocio más cerca de un milisegundo al actualizar el mostrador del temporizador en interrupción, pero esta tarea no es nada que hacer. Esos. Podemos medir el tiempo con una precisión de 4μs, lo que es suficiente para la precisión especificada del dispositivo.
Temporizador 0 No solo hemos contado el tiempo, sino que también establece banderas para iniciar ciertos problemas con una cierta periodicidad.
Tenemos dos tareas. Dé una interrupción int0 para medir el período de pulso en la entrada y cambiar la posición de la flecha.
Temporizador 1 garrapatas con una frecuencia de 16 MHz, pero porque Es de 16 bits y el modo PWM de fase y frecuencia usados, la frecuencia final de PWM es muy pequeña y las cantidades de algo alrededor de 122Hz. Esto se debe a que el temporizador de garrapatas primero, y luego hacia abajo. ¡Pero tenemos un tru, una pieza de 16 bits y puede cortar con mucha precisión la flecha! En el Datashet habrá todos los detalles.
La mecánica, por cierto, resultó ser una calidad repugnante, mover suavemente la flecha no era real debido a una mayor fricción en el mecanismo, que tenía que comenzar a ser etiquetada con aceite de transmisión. Pero estos son los detalles.
Se compiló una tabla de cumplimiento con las lecturas de instrumentos con el valor correspondiente del registro de temporizador en los loros PWM.
En el código fuente, este caso se llama GAUGE_TABLE y se toma de un hábito de un archivo separado.
Se descubrió además que si simplemente cambia la corriente en la cadena de amperímetro para mover la flecha a 1000 por delante, ganará dos o tres cuatro Oscilaciones en el área de la marca de destino, que fue completamente inaceptable y qué El cliente prestó especial atención. El hecho es que estos tacómetros inicialmente tienen este problema y se apagan varias veces en el tacto de las oscilaciones, puede obtener la flecha para balancear con una amplitud significativa (¡más de la mitad de la escala!).
Con esto necesitabas hacer algo. Mi idea era llevar la flecha a una serie de pasos más pequeños, acercándose gradualmente al objetivo. De hecho, esta parte es la más interesante y útil para los principiantes, porque Requiere algo de habilidad Después de todo, tratar con el microcontrolador Llame al registro2 () en el ciclo, para ponerlo suavemente, no la idea más exitosa. A la misma arquitectura de 8 bits impone aún más restricciones. Bueno, sobre el "flotante" (punto flotante) y necesitas olvidar en absoluto. Pero todas estas dificultades, como siempre, conducen solo a una comprensión más profunda de los procesos y cálculos producidos por el procesador.
Por alguna razón, resulta más y más, ¡pero no puedo parar en este momento!
Entonces, está claro que necesitamos progresión logarítmica. El paso de cambiar la corriente en la cadena del miliamímetro debe reducirse a medida que se acerca a la marca de destino. Recursos sobre peso dorado, lo que significa solo un método tabular. Puntos, también, si es posible, mínimo.
Comencemos con la construcción de una tabla logarítmica.
Todo es muy simple: ejecutamos Excel y varios valores de logaritmo de ondulación de ratón de ondeadores 50 para la base 2 para una secuencia de 1 a 50. Para mayor claridad, construimos un hermoso horario. 
¡Perfectamente! Exactamente lo que se necesita! Pero primero, puntos hasta 50, y en segundo lugar, todos los números con un punto flotante. ¡Esto no es adecuado para nosotros!
Por lo tanto, seleccionamos 5 puntos fuera de la matriz existente con un paso 10. Recibimos algo como esto: 
Ya mejor La aproximación constante a la meta aún se conserva, pero los puntos son 10 veces menos.
A continuación, debe normalizar el conjunto resultante. Esos. Haga que todos los valores estén en el rango de 0 a 1. Para hacer esto, simplemente divida cada elemento a 5.64385618977472 (el valor máximo de nuestra matriz). 
Por lo tanto, obtenemos toda la misma dependencia logarítmica, pero ya es mucho más conveniente para otros cálculos. Dicha tabla puede ser bastante fácil de aplicar si no fuera por un punto después de cero. Pero con esto también somos bastante fáciles de entender.
Ahora quiero que tomemos un hermoso valor de 1024 por unidad y vuelva a calcular nuestra mesa. Recibir 
Como podemos ver, la forma del horario no ha cambiado, pero los números ahora encajan en el rango de 16 bits y no hay fracciones.
En la fuente, la matriz resultante se llama Logtable
COEFICIENTE DE ESCALA (Si puede llamarlo), apareció 1024 aquí, no es por casualidad y necesita entender muy bien por qué es 1024.
En primer lugar, es un grado de TWOS y elegido, porque las operaciones de división y multiplicación costosas pueden reemplazarse por un cambio barato a la izquierda / derecha y sería tontería no usar tal oportunidad.
En segundo lugar, el coeficiente debe seleccionarse y en función del alcance de los datos a los que se aplicará. En nuestro caso, estos son los valores del registro de temporizador de 16 bits, que controla el llenado de la calza. Se encontró experimentalmente que las oscilaciones insatisfactorias de la flecha se detectan incluso con su desplazamiento brusco en 200 rpm. Esos. Si necesita mover la flecha en más de 200 rpm, necesitará suavizar. Desde la tabla Gauge_Table, se puede ver que las células adyacentes en promedio difieren en los 4000 loros de mierda, que corresponde a aproximadamente 500 rpm en la escala del instrumento. No es difícil estimar que en las cifras, el cambio de la flecha a 200 hilos será de 4000 / 2.5 \u003d 1600 WG LORTS.
En consecuencia, se debe elegir un coeficiente de escala para que primero fue lo más grande posible, porque de lo contrario, perdamos dígitos y precisión, y en segundo lugar, y, en segundo lugar, lo más pequeño posible, para no obligarnos a movernos a partir de 16 variables de descarga a 32x descargas y no Los recursos de expendientes son vanos. Como resultado, seleccionamos el grado más pequeño, que es inferior a 1600 y proporciona una precisión suficiente. Esto será 1024.
Este momento es muy importante. A veces, a veces tengo dificultad para elegir los coeficientes y variables correctas.
Bueno, entonces fui, fui. Encontramos en el código que implementa Display_RPM () y vemos que para determinar el valor específico en los loros PWM, se usa la tabla Gauge_Table y la suposición de que hay entre las marcas adyacentes del lineal. Para organizar cambios en la ley logarítmica, se ingresa una matriz de 5 puntos PWM_CUVE en la que se encuentra un conjunto de valores que deben llevar o agregar secuencialmente (dependiendo de la dirección del movimiento de la flecha) de PWM_OCR1A_CUR_VAL para hacer la flecha. Mueve suavemente y claramente.
Cada paso se forma multiplicando el valor de la PWM_DELTA al coeficiente de nuestra tabla Logtable;
Antes de multiplicarse, el valor está precalificado dividiendo por 1024.
El destino de destino final de Target_PWM se registra en PWM_CUVE, ya que, debido a los problemas de redondeo y, debido a las limitaciones de las variables de dimensión en 16, el valor exacto como resultado de los cálculos se formará con bastante frecuencia, por lo que es necesario garantizar que la flecha se gradúa de la ruta en un punto específico.
En general, todo lo anterior se concluye esencialmente en una línea.
pwm_cuve [Table_I] \u003d PWM_OCR1A_CUR_VAL + (PWM_DELTA / LOG_TABLE_MAX * Logtable [Tabla_I]);
A continuación, el ciclo principal en la señal del temporizador0 veces en PWM_UPD_PERIOD, los valores de la PWM_CUVE se incorporarán y los asignarán a la variable PWM_OCR1A_CUR_VAL, cuyo valor en la interrupción se asignará al registro OCR1A, que será inmediatamente Conduce a un cambio en el llenado de la calza y cambie la corriente en la cadena del miliamímetro.
Aquí, de hecho, casi todos los trucos, con la excepción de la transferencia del período presentado en Tika Timer a la velocidad de rotación del cigüeñal, que se mide en RPM.
Todo esto ha disminuido a motor_rpm \u003d (uint16_t) (15000000UL / (uint32_t) rot_time);
Sobre cómo resultó esta figura. Podemos hablar o no hablar la próxima vez, porque sin ese texto resultó poco y claramente no se lee incluso antes de ese lugar.
Honestamente, picado en el código, se aplicaron algunos "trucos" más, lo que puede parecer que los recién llegados no son bastante obvios. Si alguien quiere lidiar con más detalles, Walkam en Caena y LS.
Un pequeño video, como lo prometió.
Para la exactitud de las lecturas, no preste atención, la flecha normalmente no está vestida + el dial no está torcido.
El movimiento de la flecha con un paso de 1000 b / min con un salto.
Cambio suave de corriente
Está claro que en la realidad de los saltos en 1000 BOH / MIN no serán los vuelos más seguros de la flecha, que aún puede ver el video no será un problema. Solo si se eliminan y pueden perderse en gran medida en la velocidad del instrumento y su testimonio se retrasará detrás de la realidad.
PD No decir que el archivo es completamente descargado, pero sí, fue posible hacer que los lugares sean más hermosos. Sí, sé que los números mágicos son malos y sí, podría ser mejor. Por otro lado, es bastante difícil perderse en la fuente en el 2005, así que me permití un poco en Chelnting.
Simplemente recuperado en Harré, lo quería durante mucho tiempo y escribí un artículo detallado después de que el proyecto se vuelva más complicado, así que decidí que hoy "conducirá desde los campos".
Así, el código real de un dispositivo real recolectado para un término real en 7 noches, que se establecerá en un vehículo glorioso VAZ 2108 con un motor 21126 y espero confiar durante mucho tiempo para complacer al propietario que acepta disponer Mi trabajo tanto como 100 Evergreens.
Pero sabemos contigo que hice de esta manera no solo y no solo por dinero. Después de todo, es tan bonito cuando creaste algo e incluso funciona!
En el archivo, el proyecto de estudio ATMEL y el Scheme + Board en Altium Designer. La placa fue fabricada por el método LUT.
UPP: El archivo se publicó en un intercambio de archivos gratuito y, por lo tanto, murió repentinamente. Para el almacenamiento del archivo en HABRASTORAGE, lo construí en una foto del tacómetro sin un dial (se encuentra en la parte superior del artículo). En general, JPG debe mantenerse y abrir por Virrar. También puede simplemente cambiar la expansión en la ZIP.
UPD2: El esquema y la junta están reelaborados, las imágenes se actualizan, el archivo todavía está en la imagen.
UPD3. El archivo no se inserta en las imágenes ahora. Escribe en ls aquí o me encuentre
Algunos propietarios de "caballos de hierro" consideran el velocímetro por el instrumento de medición principal instalado en la motocicleta. Por supuesto, la velocidad que se mueve, la información es importante (especialmente para la policía de tráfico). Sin embargo, el "Dígale", la transmisión para esta velocidad se elige correctamente, solo un tacómetro que informa al motociclista sobre el número de velocidad del motor ayudará. No todas las bicicletas están equipadas con este dispositivo útil. Instale el mismo tacómetro en la motocicleta con sus propias manos ahora es bastante simple.
Cita y principio de tacómetro
El tacómetro es un dispositivo que mide la cantidad de velocidad del motor de motocicletas en un minuto y muestra esta información en el panel de control (en un formulario de lectura de usuario). Las lecturas de este dispositivo son necesarias para un motociclista (especialmente principiante) para:
- velocidad de conmutación oportuna en la caja de engranajes: Tan pronto como la facturación del motor aumenta a un cierto valor, es necesario cambiar a una mayor transmisión y viceversa;
- evitar el funcionamiento de la unidad de potencia de la motocicleta en los modos de límite (esta señal del sector rojo de las señales del tacómetro;
- economía de combustible Si la operación del motor se realiza en una facturación óptima (la transmisión más apropiada, la carga de motocicletas y las condiciones de la carretera).
El tablero de tableros de múltiples bicicletas modernas está originalmente equipado con este útil "informante". Sin embargo, en las interminables extensiones de nuestra patria, todavía hay una gran cantidad de motocicletas de producción soviética y rusa (por ejemplo, "Ural", "Izh", "Sunrise"), no equipadas con tacómetros. Por cierto, muchos modelos del legendario "Harley Davidson" y "triunfo" tampoco tienen punteros regulares de velocidad del motor. El tacómetro en una motocicleta que no está instalado durante la construcción se puede comprar e instalar de forma independiente.
Modelos, Fabricantes y Precios.
La gama modelo de tacómetros destinados a la instalación en motocicletas, ciclomotores y scooters es muy diverso como precio, diseño, ejecución (con una flecha o pantalla digital) y por el número de fabricantes de productos de fabricación para este propósito.
El tacómetro electrónico universal (de los fabricantes chinos "VODOOL" o "KKmoon") con luz de fondo LED en la carcasa de acero inoxidable (Ø \u003d 56 mm, la altura de la caja es de 60 mm) cuesta solo 540 ÷ 650 rublos.

Para los mismos 500 ÷ 700 rublos, puede comprar productos con una indicación digital de la cantidad de revoluciones por minuto de "IronWalls" o "FCD".

Los propietarios de marcas de motocicletas caras y prestigiosas (sin embargo, no equipadas con un tacómetro regular) pueden adquirir e instalar productos del "barón" de renombre mundial y bien probado, "Koso", "J & P ciclos" o "Sunpro". Sin embargo, el costo de estos productos será de 3,000 a 12,000 rublos.

Instalación y conexión
La instalación de tacómetros, adicionalmente instalados en la motocicleta, es bastante simple. El soporte fijado en el cuerpo del producto facilita la instalación del dispositivo en uno de los pernos de dirección a la bifurcación.

Instale los productos en el volante en el lugar más conveniente para ver el lugar del uso de un embrague de sujetador especial para instalar equipos adicionales. Se puede comprar fácilmente para 200 ÷ 300 rublos en cualquier accesorio para accesorios para motocicletas. Algunos modelos de tacómetros tienen tales sujetadores ya incluidos en la entrega.

Algunos fabricantes en la composición con el instrumento de medición suministran un conjunto completo de una amplia variedad de elementos de sujeción y cables para conectarse.

El esquema de conexión es bastante simple y no causará dificultades incluso en el "avanzado" no muy "avanzado" en el electricista de los ciclistas (Nota: los colores de los cables se indican para los tacómetros de los fabricantes chinos):
- un cable corto (como regla general, negro) se conecta al interruptor "+" bloqueo de encendido;
- el segundo corto (verde) es al marco de la motocicleta (en un lugar conveniente);
- el tercer corto (negro y amarillo), al contacto de bajo voltaje de la bobina, yendo al interruptor;
- dos cables largos y delgados (negro y rojo) - paralelos a la bombilla de la luz del velocímetro.

¡Importante! Los cables de conectación de tacómetros de fabricantes estadounidenses y europeos tienen otra coloración. Pero a diferencia de los proveedores chinos, debe estar presente un esquema de conexión de dispositivo.
Fabricación independiente de tacómetro.
La opción más común para la fabricación de un tacómetro en una motocicleta con sus propias manos es el uso como base para el dispositivo de medición automático del dispositivo estándar TX-193-38130 del automóvil VAZ-2106 (o VAZ-2103, o NIVA-2121).
Método de fabricación:
- Desmonte con cuidado el tacómetro de automóvil TX-193.
- Condensador (con una capacidad de 0.22 μF), instalado en el circuito de amperímetro, caemos e instalamos uno nuevo (con una capacidad de 0.47 μF). De lo contrario, las lecturas del instrumento se reducirán en 2 veces.

- Recolectamos el dispositivo en el orden inverso.
- Desde latas de metal (por ejemplo, desde debajo del café), el caso se realiza un diámetro adecuado.

- Confirme el dispositivo fabricado en el lugar más conveniente (por ejemplo, junto al velocímetro).
- Conectamos el dispositivo al circuito eléctrico de la motocicleta (el diagrama es similar a los descritos anteriormente).

- Comenzamos la motocicleta y revisamos el tacómetro casero en el trabajo.
¡Para información! Cree que una "obra maestra" es justificada económicamente, si puede comprar un TX-193 usado en un desmontaje de automóviles, ya que el nuevo es ahora 900 ÷ 1100 rublos.
Tacómetro consiste en un indicador LED de 4 bits (para revoluciones precisas) y grupos leds Planeado en un círculo (para visual, más visual, enfoque). El indicador muestra con una precisión de 1 RPM LED Strip consta de 32 LED verde y 5 LED rojo ubicados al final de la escala o en cualquier número de rojo a su discreción.
Línea circular de 32 LED
Punto o pantalla inapropiada
Pantalla de 4 bits
Indicador de transmisión LED
Limitador de salida
Medición 0-9999 o más de 10000 revoluciones por minuto.
Dos parámetros de pantalla por encima de 9999 rpm
Opciones para 1 RPM, 10 RPM o 100 RPM de resolución de pantalla
Pantalla de brillo automático en condiciones de poca luz.
Ajuste en motores de 1, 2, 3, 4, 5, 6, 8, 10 y 12 cilindros y motores de 4, 2, 3, 4, 5 y 6 cilindros de 2 tiempos
Elegir una línea roja
Selección de velocidad de cambio de luz.
Seleccione la velocidad limitadora
Elegir el número de línea LED roja
Seleccione el período de actualización de la imagen
Selección de histéresis para linea LED.
Elección, limitador mínimo por tiempo.
El dispositivo se puede dividir en dos partes:
1) Tablero de control
2) Tablero de visualización
La placa de control se encuentra en el controlador PIC16F88, la potencia de los LED y los botones de control. Quizás lo más interesante son los botones de control con los que se ajusta el tacómetro. Total de tres botones:
S1 - Instalación
Al configurar los LED de dispositivos, el LED34 verde (modo) y el LED rojo35 (instalación) muestran el estado. Indicador de 4 bits con un ánodo común.
El dispositivo está conectado al nivel bajo o al nivel alto de la señal. En niveles bajos, la conexión a la computadora de automóviles se entiende y es alta a la bobina de encendido.
El microcircuito MC34063 es un convertidor DC-DC que funciona a una frecuencia de 40 kHz, un transistor para alimentar el LED a la corriente estabilizada.
VR1: le permite ajustar el voltaje de salida MC34063 en el rango de 1.25-4V.
La inductancia L1 se enrolla en el anillo de ferit 28mm con un cable de 0.5 mm.
Estabilizador de voltaje LM2940CT-5 por 5V, alimentando el circuito de control. Microcircuitos M5451, LED de conductores.
El brillo automático se implementa en el elemento LDR1 (fotorestor), que se encuentra en la placa de indicación. Cuanto mejor sea la iluminación, menor resistencia LDR1. El voltaje LDR1 en alta iluminación es de aproximadamente 1B. Dependiendo de la resistencia de LDR1, se aplica diferente voltaje a los transistores Q2 y Q3, que a su vez y controlan el brillo del LED a través de los controladores. Para ajustar el brillo automático en el elemento del diagrama VR6, que es una resistencia variable en 50 kΩ.
El tacómetro proporciona revueltas electrónicas, límite.
Ajustes:
Para ir al modo de ajuste, es necesario presionar el botón Arriba y usar la alimentación si no se presiona el botón, el dispositivo cambiará a la operación normal. Vamos a liberar el botón de arriba y la unidad caerá en la pantalla, lo que significa el modo 1. El LED "MODE" se quemará. Es necesario seleccionar los botones de línea ascendente a 1-13.
En cada modo, necesita hacer su ajuste.
| Modo | Posibles instalaciones | Nota |
| 1 número de cilindros | 1-12 | Elegir una serie de cilindros |
| 2 LEDs rojos | 0-10 | Pogolas cambiando la longitud de la pantalla roja. |
| 3 línea roja | 0-30,000 | Instalación del primer LED rojo. |
| 4 vueltas en el LED | automáticamente | Calculado automáticamente a partir de los modos 2 y 3. |
| 5 cambio de luz | 0-30,000 | Si no necesita instalarse en la línea roja. |
| 6 límite de vuelco | 0-30,000 | Establecemos un limitador de velocidad electrónico (ver.12) |
| 7 histéresis | 0-255 | Previene parpadeo de LEDs, MODE 4. |
| 8 visualizaciones actualizaciones | 0-510 ms con un paso 2ms | Se establece el período de actualización de la pantalla. |
| 9 Pantalla Formato | 0,1,2 | Expuesto el formato de visualización RPM 0) 9999 1) 9,999-10.00 2) 9,99-10.00 |
| 10 permiso | 0,1,10 | Exponer permiso 0) 1 rpm 1) 10 rpm 10) 100 rpm |
| 11 visualización | 0 o 1. | 0) Para mostrar un punto 1) para mostrar un cambio continuo |
| 12 sensibilidad | 0 o 1. | 0) Para el nivel de bajo nivel "0V" 1) para alto nivel "+ 5V" |
| 13 vino por el periodo | 0-510 ms con un paso 2ms | El tiempo mínimo se establece cuando la salida de corte está activa. |
MODO 1 - Número de cilindros: ingrese el número exacto de cilindros para un motor de 4 tiempos (1-12 cilindros). Por ejemplo, seleccione "2" para 1 cilindro de 2 tiempos, 4 para un 2-cilindro de 2 tiempos, etc. 11 o 7 para motores asimétricos de 4 cilindros de 2 cilindros es adecuado para los motores. 9 Para ajustar el motor asimétrico de 4 tiempos de 4 tiempos.
Modo 2 - LED rojo: Responsable del resplandor de una tira roja de LEDs, seleccione el número de LED que se encenderá, por defecto 5, puede elegir 0-10.
Modo 3 - Línea roja: este modo se usa para instalar las revoluciones máximas recomendadas para su motor. El valor predeterminado es 9000. Tenga en cuenta que 10,000 revoluciones se mostrarán como 10.00.
MODE 4 - Enciende el LED: este modo muestra el aumento de la facturación para cada LED en la línea, es decir, Cuántas revoluciones representan un LED.
Modo 5 - Cambio de luz: el valor predeterminado es 8000 revoluciones por minuto, que van desde cero y, por encima de 30 mil revoluciones por minuto. El ajuste está en formato X1000, por ejemplo, 8000 se muestra a 8,000.
Modo 6 - Limitador de rollo: este modo está configurado para limitar las revoluciones por minuto. En el proceso de trabajo, el limitador de salida cambia cuando se supera las revoluciones medidas, este parámetro y el nivel de señal de salida dependen de la configuración (consulte el modo 12). Esta instalación se puede cambiar en 100 pasos de 9900 revoluciones en el rango de cero a 30000 revoluciones por minuto.
Modo 7 - Histéresis: Para evitar el umbral, puede establecer la Hystroresis, por ejemplo, los LED posteriores se encienden y apagan rápidamente. La histéresis de configuración predeterminada es de 50 revoluciones por minuto y se puede cambiar en 1 de 0-255 revoluciones por minuto. Tenga en cuenta que el valor de la histéresis debe ser menor que el valor (consulte el modo 4).
MODO 8 - Mostrar actualizaciones: actualizado cada 1 ms, pero es demasiado rápido para una pantalla digital para leer si hay cambios en las revoluciones. Como resultado de la actualización, la pantalla digital disminuirá a una velocidad más conveniente. Como regla general, el período de actualización de 200 ms (o cinco cambios por segundo) es adecuado. De forma predeterminada, la instalación de 250 ms en incrementos de 2 de 0 a 510ms.
MODE 9 - Formato de pantalla: este ajuste es principalmente para el mantenimiento de los motores, que están por encima de 10,000 revoluciones por minuto. La configuración inicial del valor "0" establece la pantalla para mostrar desde 0-9999 revoluciones por minuto. Sobre este indicador, la pantalla muestra "0" 10000 revoluciones por minuto, "1000" por 11000, etc. Use esta configuración para los motores que no sean superiores a 10 mil revoluciones, o que solo a veces alcancen la facturación a este nivel.
Modo 10 - Resolución: Si no le gusta cómo se ejecutan las lecturas con un conjunto de velocidad rápida, puede reducir la resolución para reducir el permiso, colocar "1" y la última tsyfra siempre mostrará cero. Si "2" entonces los dos últimos serán cero.
MODO 11 - Visualización, punto o regla: la línea LED funcionará en el modo Punto (es decir, el LED se encuentra en cualquier momento) o en forma de un cambio continuo. Seleccione el modo de punto "0" o "1" para el modo continuo.
MODO 12 - SENSIBILIDAD: Si se establece en "0", va de 0 a + 5V, y si "1" luego de + 5V a 0.
MODE 13 - Llegó al período: el tiempo mínimo se establece cuando la salida de corte está activa
En un Totómetro, hay un limitador de velocidad máxima, que se puede usar en un circuito separado que limitará la velocidad del motor. Por ejemplo, en el circuito de encendido o suministro de combustible.
El mercado automotriz de hoy ofrece una opción de ambos automóviles presupuestarios de buena calidad y más caros autos de clase "premium". Disponible en el mercado tacómetros electrónicos Diseñado para automóviles de producción nacional, en motores de cuatro cilindros. A cualquier modelo, el automóvil VAZ se puede conectar fácilmente al tacómetro electrónico. El concepto de un motor de cuatro cilindros ahora está en el mercado el más común, pero además de ellos, hay motores de 3 cilindros o 6-8-12-cilindros. En este caso, es imposible conectar cualitativamente el tacómetro electrónico al automóvil, los indicadores de instrumentos no mostrarán con precisión los parámetros válidos.
Figura 2. Se representa el diagrama eléctrico del tacómetro electrónico de cuasi altar. El principio de operación de este dispositivo es el siguiente. La velocidad de rotación del cigüeñal del motor corresponde a una escala lineal de LED que se colocan en el panel Tacómetro. Por supuesto, los tacómetros digitales que se produjeron en la fábrica son más precisos en su testimonio, pero cuestan dinero. Sugerimos crear un dispositivo similar con sus propias manos y con un pequeño conjunto de componentes.
La escala de tacómetro de electrones consta de 9 LEDs. Cada LED resplandeciente debe corresponder a 600 rpm del motor. Solo un LED debe trabajar en el motor ocioso. El ajuste del tacómetro se realiza seleccionando la calificación de resistencia R6. Dependiendo de la resistencia a la resistencia, puede configurar los indicadores al número requerido de cilindros. También puedes cambiar el precio de la división.
La fuente de los pulsos para la operación completa del tacómetro eléctrico, dependiendo de la configuración del automóvil, puede actuar como un sensor de sala, que se incluye en el sistema de encendido electrónico, el sensor de posición del eje y otras versiones. El funcionamiento de estos dispositivos envía los pulsos a nuestro circuito eléctrico que cambian la resistencia R1.
El indicador del tacómetro funciona como medidor de frecuencia simplificado. Los pulsos que vienen constantemente del sensor de motor automotriz caen en la entrada de conteo del contador decimal. Los impulsos del generador de reloj van a la entrada "cero". El estado del contador depende de la frecuencia de entrada del pulso. Cuanto más frecuencia, mayor será el estado del contador.
Los LED serán brillados dependiendo de la frecuencia de entrada del indicador. La decimación decimal está conectada al costo del mostrador. En el proceso de contar los pulsos de entrada, no se enciende ningún LED. La inercia de la visión humana crea como si la impresión de la luminiscencia simultánea de los LED.
El poder de operación del esquema de dispositivo se puede conectar desde cualquier fuente, evitando la ignición. Un encendedor de cigarrillos puede servir como punto de conexión, el conector de radio automotriz.
En algunos casos, la fuente de alimentación se puede suministrar desde el bloqueo de encendido. No hay una gran diferencia cuando el motor no funciona, el circuito eléctrico se descarga, respectivamente, no fluye en los LED, dejan de brillar al final del motor.
El diodo VD1 está diseñado para proteger el circuito eléctrico de la polaridad incorrecta de la fuente de alimentación, que se alimenta a la entrada del circuito. Dado que falta el estabilizador de voltaje, el chip k561 funciona con una tensión estándar a 15 V. Todos los electricistas automáticos y los propietarios de automóviles se sabe que la cuadrícula de potencia automotriz no debe suministrar más de 14 voltajes de voltaje, ya que no afecta el funcionamiento de Aparatos eléctricos a bordo.
El sensor de rotación del cigüeñal envía pulsos en tiempo real a la base del transistor VT1. El transistor KT3102 puede ser reemplazado por un análogo de KT315. La entrada utiliza un transistor para proteger la entrada del chip CMOS de varias caídas de voltaje que se producen en la red eléctrica del automóvil. Además, el transistor VT1 funciona como convertidor.
La calificación de resistencia R1 se elige dependiendo de la fuente de los pulsos. El diagrama indica la resistencia correspondiente al alcance de los pulsos de la salida del sensor de posición del cigüeñal en el motor de inyección o en el sensor de la sala en el circuito de encendido sin contacto del motor de carburador.
Los pulsos que ya están consistentes entre sí se eliminan del colector VT1 e inscríbase en el gatillo Schmitt, que se basa en los elementos D1.1-D1.2. El gatillo es responsable de convertir los pulsos a la forma necesaria para el contador. El condensador C2 suprime la interferencia que puede causar fallas en el mostrador. En un par con una resistencia R4, el condensador C2 forma un filtro de alguna manera, lo que no transmite los pulsos en relación con la alta frecuencia.
La salida D1.2 emite los pulsos a la entrada de conteo. El multivibrador se ensambla en otros dos elementos del chip D1. El multivibrador genera un pulso de reloj de cierta frecuencia. La frecuencia de reloj a su vez depende de la resistencia seleccionada R6. Estos pulsos llegan a parte del circuito eléctrico C3-R7, que contribuye a la formación del pulso a cero el contador D2.
Los LED de indicación HL1-HL9 están conectados a las salidas del contador D2. El microcircuito K561I8 tiene una corriente relativamente débil en sus salidas, por lo tanto, se recomienda utilizar LED de supermercados como indicadores (con corriente de corriente baja, están brillando como indicador ordinario). Chip K561L5 Reemplace si es necesario Analógico K561L7 o CD4001, CD4011. C561I8 Microchus puede ser reemplazado por CD4017. El diagrama presenta el controlador de brillo R9, con el que podemos ajustar la corriente entrante, y también es el brillo de la indicación. Esto le permite reducir el brillo de los LEDs por la noche para que no los ciegan los ojos del conductor.
Figura 2. La placa de circuito impresa simple se representa, en la que se ensambla el indicador. Para no complicar las tarifas más caras del cableado, se decidió conectar los LED HL1-HL4 al conteo del contador a través de los puentes del cable de montaje. Los LED están unidos a un tablero de impresión en una sola línea.
En ese caso, si el diseño del tablero de instrumentos del automóvil no permite colocar de manera compacta todo el módulo con un circuito y un diodos, entonces los LED se pueden sacar de la pizarra configurándolos en una sección de panel de control separado.
Hay otra opción para instalar el tacómetro en el tablero. Este es un indicador de recolección en una caja de plástico independiente. Con la ayuda del escocés bilateral lo pegue en una ubicación conveniente.
LEDs mejor comprar relleno. Preferiblemente forma rectangular.
Después de instalar el conjunto del dispositivo en su lugar, debe ajustar el funcionamiento correcto del dispositivo. El ajuste debe iniciarse con el cálculo de la resistencia R1 en función del hecho de que la resistencia indicada en el diagrama corresponde a la descarga de pulsos entrantes. Luego, es necesario reemplazar la resistencia R6, se enciende sucesivamente con resistencias variables por 1 ohmio y permanente por 10 com. A continuación, ajuste la resistencia de variables a la máxima resistencia. Es necesario ajustarlo para que solo solo dos LED brillen en el motor ocioso. Marque esta posición de la resistencia. Luego, aún necesita reducir la resistencia para que solo se encienda un LED. Ahora, cuando se establece el tapón de la resistencia, debe ajustar la resistencia a la posición central. A continuación, medimos la resistencia resultante y descubriremos la resistencia R8.
Utilizo un dispositivo especial en la estación de mantenimiento Puede medir la frecuencia del cigüeñal del automóvil. Por lo tanto, tener los datos necesarios sobre el número de revoluciones del cigüeñal puede ajustar con mayor precisión los indicadores, con las lecturas del instrumento ejemplar. Este dispositivo es solo un indicador, no es necesario relacionarlo como un dispositivo de medición.
Buenas tardes, queridos aficionados de radio! Como sabemos, el tacómetro es un dispositivo de medición que sirve para medir la frecuencia de rotación de los mecanismos de los mecanismos. En los automóviles para medir la velocidad de rotación del motor del cigüeñal, se instalaron tacómetros mecánicos, los automóviles modernos están equipados con eléctricos o electrónicos. Recientemente encontré en mi carpeta con un simple tacómetro con un simple tacómetro fuera de los años 90. Él mismo no fue recogido, pero ella recogió al tío, dice que funciona bien. Foto, lamentablemente, ya no. El principio de operación se basa en la transformación del voltaje alterno que se elimina del devanado del generador de automóviles, en un voltaje constante, proporcional a la velocidad de rotación del cigüeñal y cambiando la longitud de la banda luminosa en el indicador IN-13 Lámpara de descarga de gas. Aquí hay un diagrama de este dispositivo:
Un transformador de 6.3 voltios, un devanado de 6.3 voltios utilizados como el devanado primario, y como secundario, 220 voltios. El puente de diodos está diseñado para 400-500 voltios, el ampero no es importante. Resistores R1-R2 2 vatios (pueden ser 5 vatios). Los condensadores C1-C2 son definitivamente no polares.
Configuración de táctiles

El ajuste del dispositivo ocurre de la siguiente manera: la selección de los condensadores C1, C2 y Resistor R4 logran que en ralentí la lámpara indicadora está en un largo tiempo (a una longitud más baja, aumente los condensadores de capacitancia C1, C2 o Reduzca la resistencia R4 ). Luego, consiga un cambio uniforme en la longitud de la banda luminosa mientras aumenta la velocidad de rotación del cigüeñal (seleccionando las resistencias R4, R5, C1, C2, C3 condensadores) y se gradúe con la ayuda de un tacómetro de referencia. Esquema enviado Vasily R..
 Magnetometría en la versión más sencilla El Ferrozond consiste en un núcleo ferromagnético y dos bobinas en él
Magnetometría en la versión más sencilla El Ferrozond consiste en un núcleo ferromagnético y dos bobinas en él Búsqueda de curso de búsqueda de trabajo efectivo
Búsqueda de curso de búsqueda de trabajo efectivo Las principales características y parámetros del fotodiodo.
Las principales características y parámetros del fotodiodo. Cómo editar PDF (cinco aplicaciones para cambiar archivos PDF) Cómo eliminar páginas individuales de PDF
Cómo editar PDF (cinco aplicaciones para cambiar archivos PDF) Cómo eliminar páginas individuales de PDF ¿Por qué la ventana del programa de despedida se desarrolla durante mucho tiempo?
¿Por qué la ventana del programa de despedida se desarrolla durante mucho tiempo? DXF2TXT - Exportación y traducción del texto desde AutoCAD para mostrar un punto de tráfico DWG en TXT
DXF2TXT - Exportación y traducción del texto desde AutoCAD para mostrar un punto de tráfico DWG en TXT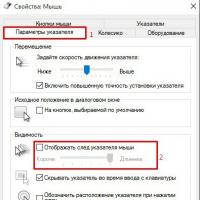 Qué hacer si el cursor del mouse desaparece.
Qué hacer si el cursor del mouse desaparece.