Tecnología de medición Sondas ferromagnéticas. Magnetometría en la versión más sencilla El Ferrozond consiste en un núcleo ferromagnético y dos bobinas en él
Los fenómenos electromagnéticos en un transformador con un núcleo de acero son similares a los fenómenos en el transformador de aire, pero un flujo magnético que impregna ambos devanados, no en el aire, sino a través de un núcleo de acero (Fig. 15.31).
Con la carga del transformador, hay tres flujo magnético: F. - principal en el núcleo, F. σ 1 - Dispersión, conectada solo con el devanado principal, F. σ 2 - Dispersión, conectada solo con el devanado secundario.
El flujo magnético principal conduce en los devanados primarios y secundarios de los EDS. respectivamente mI. 1 I. mI. 2. Flujos magnéticos de dispersión F. σ 1 I. F. σ 2 Soporte en los devanados primarios y secundarios de EDS. respectivamente mI. σ 1 I. mI. σ 1 .
Voltaje u. 1 , el aplicado al devanado primario es igualizado por una caída de voltaje sobre el impacto activo de las fuerzas de devanado y electromagia. mI. σ 1 I. mI. σ 1, es decir.
Considere primero el transformador perfecto en el que r. 1 = 0; x. σ 1 = 0; r. 2 = 0; x. σ 2 = 0; w. 1 = w. 2 .
En la inactividad, tal transformador no difiere de la bobina ideal ordinaria y puede representarse por el esquema de sustitución (Fig. 15.33).







r. mETRO.


Construimos un diagrama de vectores del transformador ideal en el curso inactivo (Fig. 15.34).

Fuerza magnetizadora en el ralentí
Ahora ahora somos un esquema para reemplazar el transformador ideal durante su carga (Fig. 15.35).
Si conecta la carga con resistencia a los clips de bobinado secundario. Z. nORTE. Luego pasará la corriente.  que, a su vez, se esforzará por reducir el flujo magnético
que, a su vez, se esforzará por reducir el flujo magnético  Y esto conducirá a una disminución en los EDS.
Y esto conducirá a una disminución en los EDS.  ,
como resultado de lo que la corriente
,
como resultado de lo que la corriente  edad
a tal magnitud en el que el flujo magnético
edad
a tal magnitud en el que el flujo magnético  se realizará el valor original y la ecuación (15.35).
se realizará el valor original y la ecuación (15.35).

Por lo tanto, la apariencia de la corriente en el circuito secundario conduce a un aumento en la corriente en el circuito primario. En un transformador cargado, el flujo magnético en el núcleo es igual al flujo magnético en el ralentí, es decir, siempre F. \u003d const. Al cargar una corriente magnética  creado bajo la acción de las fuerzas magnetizantes de los devanados primarios y secundarios:
creado bajo la acción de las fuerzas magnetizantes de los devanados primarios y secundarios:
|
|
 .
.Construimos un diagrama de vectores del transformador perfecto con una carga (Fig. 15.36).

Convitamos el esquema ideal de sustitución del transformador para el que se deshace de la comunicación inductiva. Si conecta los mismos clips de los clips de devanado del transformador, entonces el modo de operación del transformador no cambiará.
Considere los primeros elementos relacionados inductivamente que ahora tienen un punto común. El coeficiente de acoplamiento de dos elementos en este caso es uno igual, ya que todo el flujo magnético está completamente desbloqueado con los tweeters de los devanados primarios y secundarios, es decir,
|
|
 ,
,por lo tanto, teniendo en cuenta que w. 1 = w. 2, encontramos:
|
|
 .
.Reemplace ahora parte del esquema con elementos conectados inductivamente con un punto común (Fig. 15.37 pero) en un circuito equivalente sin comunicación inductiva (Fig.15.37 b.).

 ;
;
 ;
;
Teniendo en cuenta que el esquema encontrado toma la vista que se muestra en la FIG. 15.37 en, y el esquema de reemplazo del transformador ideal es una vista representada en la FIG. 15.38.
Si ahora considera la resistencia de dispersión activa e inductiva a ambos devanados, entonces para un transformador que w. 1 = w. 2, obtenemos un esquema de sustitución que se muestra en la FIG. 15.39.


Escribimos las ecuaciones de los contornos de circuito primario y secundario:
|
| |
 ;
;Construimos un diagrama de cadena de vectores (Fig. 15.40).
Este dispositivo mide el campo magnético de la Tierra en un punto específico. Al mover el dispositivo cerca de materiales ferromagnéticos (en nuestro caso, acero, hierro fundido), se registra un cambio en el campo magnético en comparación con el fondo. Los instrumentos de este grupo son adecuados para encontrar objetos de hierro fundido y acero grandes (tanques, locomotoras, automóviles). Del principio de funcionamiento del magnetómetro, los siguientes flujos de características: el grado de distorsión del campo magnético depende principalmente de la masa del objeto. Por lo tanto, en el tanque y en la pila de riel, el magnetómetro funcionará por igual peso. En consecuencia, el magnetómetro es adecuado para la búsqueda de armas y almacenes de municiones. En metales no ferrosos, el magnetómetro no reacciona.
Conceptos básicos
Magnetómetro - Dispositivo para medir las características del campo magnético y las propiedades magnéticas de las sustancias (materiales magnéticos). Dependiendo del valor determinado, los instrumentos para la medición se distinguen: estrés de campo (patrimonio), direcciones de campo (inclinadores y calcomanías), gradiente de campo (graduados), inducción magnética (teslaametters), flujo magnético (websómetros o flujo), fuerza coercitiva (Coercimetímetros)), permeabilidad magnética (MJ METHER), susceptibilidad magnética (medidores de kappa), momento magnético.
En busca de objetivos utilizados. teslameterosy Gradientometría. La idea principal de usar un magnetómetro para buscar objetos que contienen hierro es la siguiente. Como saben, la Tierra tiene su propio campo magnético. La magnitud y la dirección de este campo es casi constante en áreas suficientemente grandes. Sin embargo, cerca del objeto ferromagnético, el campo magnético cambia, tanto en la dirección como en la magnitud. Al solucionar el uso de un magnetómetro, cambiando el campo magnético, se puede detectar dicho objeto. Además, aplicando los métodos de cálculo utilizados en la geofísica, puede calcular las dimensiones del objeto y la profundidad en la que se encuentra.
¿Qué nos dice la geofísica de los Estados Unidos? En los polos, los componentes verticales de la inducción magnética son aproximadamente iguales a 60 mkl, y horizontal - cero. En el ecuador, el componente horizontal es de aproximadamente 30 mkl, y la vertical es cero. Algunos números: un objeto de hierro que pesa 1 libra (453 gramos), a una distancia de 3 m cambia el campo magnético a 1 NTL. Por lo tanto, un magnetómetro decente debe medir el campo magnético dentro de 30,000 - 60,000 NTLS con una precisión de 1 NTL.
Principio de funcionamiento
Sensores principales utilizados en magnetómetros:
Principio de operación Óptico-mecánico los magnetómetros son similares a la obra de la brújula. Un elemento sensible (sensor) de tales dispositivos es un imán permanente que puede girar libremente. Dependiendo de la orientación del eje de rotación del imán permanente, su momento magnético y la resistencia del campo magnético de la tierra, el imán constante ocupa una cierta posición en relación con el plano horizontal o vertical. El cambio en la tensión del campo magnético de la Tierra conduce al cambio correspondiente en el ángulo de inclinación del imán permanente (con otras cosas que son iguales). Para aumentar la precisión de determinar el ángulo de inclinación del sistema, se utilizan dispositivos ópticos especiales. Para una disminución de error cuando la orientación del meridiano magnético utiliza un método de compensación de mediciones. Para hacer esto, el dispositivo tiene un imán de compensación que está relacionado rígidamente con la escala de conteo. La compensación suave se realiza girando este imán hasta que el imán permanente no se establece horizontalmente. El momento de la compensación se fija con la ayuda de un sistema óptico especial combinando el espejo reflejado en el espejo y los índices horizontales fijos. Para ampliar los límites de medición Δz, hay un segundo, llamado imán de rango de la compensación del paso. El error de medición con dicho instrumento es de 2-5 NTLS.
La base del diseño del Ferrorsond (elemento sensible). ferrorsondo Magnetómetro La bobina eléctrica se enrolla en la varilla alargada de un ferromagnet, que tiene una pequeña fuerza coercitiva y una gran permeabilidad magnética en campos magnéticos débiles (por ejemplo, de una aleación de hierro y níquel - permallée). En ausencia de un campo magnético externo cuando se transmite a través de una bobina electrónica (primaria) de una corriente eléctrica alterna con una frecuencia F y una amplitud suficiente para crear un campo de excitación, excediendo el nivel del nivel de saturación central, un EMF de un doble La frecuencia 2F aparece en la bobina de medición (secundaria). En presencia de un campo magnético permanente externo, que es diferente de cero a lo largo del eje de la barra, la frecuencia que coincide con la frecuencia del campo de excitación F prevalecerá en la inducción. El magnetómetro Ferrozond consta de dos barras de permalloe idénticas ubicadas en paralelo entre sí y orientadas a lo largo del componente medido del campo magnético de la Tierra. Los devanados de las bobinas de excitación están conectadas de tal manera que el campo variable en dos núcleos se indica opuesto. Para medir el campo magnético exterior (su componente dirigido a lo largo del eje de la barra), generalmente se usa un método de compensación, lo que consiste en compensar el campo magnético permanente de la Tierra por el campo de corriente de ajuste permanente. La magnitud de la corriente de compensación se juzga en la tensión del campo magnético de la tierra a lo largo del eje del Ferrorsondo. Dichos dispositivos incluyen aeromagnetómetro AMF-21. Debido al error en la orientación del Ferrorsond, la precisión de disparar dicho magnetómetro alcanza decenas de nanotex. En Wells, se usa un ferromagnetómetro bien tipo (por ejemplo, TSMK-30), lo que permite medir los componentes del campo magnético AZ, AH, AU con un error de hasta ± 100 NTL.
Firma Precision Navigation Inc. (EE. UU.) Desarrolló una versión mejorada del sensor de ferroresonancia, que recibió el nombre industrial magnético Sensor - Sensores magneto-inductivos (MI). El sensor es una inductancia de inductor de microminiatura con un núcleo ferromagnético. La bobina contiene solo un devanado y registra el campo magnético en la dirección de solo uno de los ejes.
Sensor de pasillo Funciona, aproximadamente, como sigue (consulte la Figura): si se salta la corriente a través de la placa de semiconductores en la dirección AB, luego con el campo magnético, la intensidad H, dirigida perpendicular al plano del plano, en los bordes de la placa EF Habrá un EDC. El valor, la EMF depende de la intensidad del campo magnético. La sensibilidad de los magnetómetros con los sensores de pasillos es de aproximadamente 10 NTL.
 |
| magnetistor. |
Magnetistor. (Ver Fig.) Contiene una placa de semiconductora 2 ubicada en un sustrato 1 de un ferromagnet anisotrópico de alta eficiencia. El principio de operación de la resistencia magnética es la siguiente: una estructura de dominio se forma en el Ferromagnet, al menos de dos dominios. La magnetización en los dominios es el plano normal del sustrato y son opuestos entre sí. La placa se encuentra a lo largo de los dominios con la misma dirección de magnetización. Las estructuras de dominio del sustrato ferromagnético crean un campo magnético inicial en una placa semiconductora, aumentando su resistividad y cambiando el punto de operación. Al colocar una resistencia magnética en un campo magnético medido, conduce a un cambio adicional en la resistividad. El umbral de la sensibilidad de los magnetororesistores es de aproximadamente 0,1 NTL.
Principio de operación protónico o Nuclearmagnetómetrobasado en el fenómeno de la precesión libre de protones en el campo magnético de la Tierra. Después de un cierto efecto electromagnético en el sensor que contiene protones, los protones se precenen alrededor de la dirección del campo magnético de la Tierra con una velocidad angular Ω, proporcional a la tensión total del campo magnético de la Tierra T: ω \u003d en, donde un es el coeficiente de proporcionalidad, que es igual a la relación giromagnética del kernel (el punto magnético del kernel a mecánico). El magnetómetro de protones consiste en una unidad o un sensor magnéticamente sensible (recipiente que contiene protones con agua, alcohol, benceno, etc., alrededor de las cuales se enrollan las bobinas emocionantes y medidas); Conexión de los cables; bloque electrónico (preamplificador, esquema de conmutación, multiplicador de frecuencia, medidor de frecuencia y indicador de luz); Registro de dispositivos y fuente de alimentación. El ciclo de operación, es decir, el tiempo para determinar los valores del campo magnético en cada punto, consiste en el tiempo a la polarización del sensor (es 3-8 C), el tiempo de conmutación del sensor y el tiempo para determinar La frecuencia de la señal inducida en la bobina del sensor (0,1- 0,4 s). Dependiendo de la sustancia y la precisión que contienen protones para determinar la frecuencia de la precesión, el ciclo de operación es de 1 a 10 s. Con una pequeña velocidad de movimiento del portador del magnetómetro (opciones de tierra o marítimo), los datos en el campo magnético de la Tierra T se obtienen casi continuamente. A una velocidad alta, por ejemplo, a la velocidad de la aeronave de 350 km / h, la distancia entre las mediciones es de 300 m. Con la ayuda de un magnetómetro de protones, es posible realizar una vigilancia magnética utilizando portadores metálicos: barcos o aviones con su propio campo magnético. Al mismo tiempo, el sensor del magnetómetro se remolca en el cable, cuya longitud debe exceder varias veces el tamaño longitudinal del portador. Con la ayuda de un magnetómetro de protón discretamente (1 vez en 1-10 ° C), el valor absoluto de la inducción magnética del campo geomagnético con un error de ± 1-2 NTL se mide a baja sensibilidad (± 45 °) a La orientación del sensor del meridiano magnético, la independencia de la temperatura y el tiempo (falta de desplazamiento de cero). Los magnetómetros de protones se utilizan con suelo (por ejemplo, el disparo doméstico MMP-203) y marina (MMP-3), con menos frecuencia con las películas aéreas (MCC-214) y las observaciones de los pozos.
EN cuánticomagnetómetrosdestinado a medir los valores absolutos del módulo de inducción de campo magnético, use el llamado efecto Zeeman. En la estructura electrónica de los átomos con un momento magnético, al ingresar al campo magnético, los niveles de energía se escindan en la pendiente, con la diferencia de energía y, en consecuencia, la frecuencia de radiación en el módulo proporcional del vector de inducción magnética total en el punto de observación. El elemento sensible del magnetómetro es un recipiente en el que hay pares de cesio, rubidio o helio. Como resultado del brote de la luz monocromática (método de bomba óptica), los electrones de vapor se traducen de un sublotector de energía a otro. Devolviéndolos al nivel anterior después de que el final de la bomba esté acompañado por la emisión de energía con una frecuencia proporcional al campo magnético. Con la ayuda de un magnetómetro cuántico, la medición T se lleva a cabo con un error de ± (0,1-1) NTL con sensibilidad débil a la orientación del sensor, alta velocidad y estabilidad de las lecturas (desplazamiento de cero ligero). Los principales magnetómetros cuánticos domésticos son los dispositivos de los siguientes grados: terreno (peatonal) M-33 y MMP-303, KM-8, aeromagnetómetro KAM-28. En los magnetómetros para disparar en movimiento (marina, aire o automotriz), el registro de inducción magnética se lleva a cabo automáticamente, casi continuamente. Los perfiles están atados de varias maneras (navegación por radio, con fotografía aérea, etc.). Los resultados de las observaciones a veces están presentes en forma analógica en forma de un magnetograma, pero con más frecuencia, en forma digital, lo que garantiza el procesamiento posterior de información en computadoras a bordo o en centros de computación expedicionario.
El convertidor de campo magnético Ferrorsond, o ferrozond, está diseñado para medir e indicar campos magnéticos y cambiantes constantes y lentamente y sus gradientes. El efecto de la ferrozona se basa en el cambio en el estado magnético del ferromagnet bajo la influencia de dos campos magnéticos de diferentes frecuencias.
En la Fig. Muestra esquemáticamente algunas opciones para los diseños de Ferrorsonds.
En la versión más sencilla, el Ferrorsond consiste en un núcleo ferromagnético y dos bobinas en él:
cortar las bobinas impulsadas por la corriente alterna
y la bobina de medición (señal).
El núcleo de Ferrorsond se realiza a partir de materiales de alta permeabilidad magnéticos.
Se suministra un voltaje variable a la bobina de excitación de un generador especial con una frecuencia de 1 a 300 kHz (dependiendo del nivel de parámetros y la cita del dispositivo).
En ausencia de un campo magnético medido, el núcleo bajo la acción de un campo magnético alterno H, creado por la corriente en la bobina de excitación, se libera a lo largo de un ciclo simétrico.
El cambio en el campo magnético causado por la magnetización del núcleo a lo largo de una curva simétrica, induce un EDC en una bobina de señal, que varía para una ley armónica.
Si se realiza simultáneamente en el núcleo, el campo magnético constante o cambiante colgante medido, pero la curva de magnetización cambia sus dimensiones y forma y se vuelve asimétrica. Esto cambia la magnitud y la composición armónica del EMF en la bobina de la señal.
En particular, aparecen los componentes armónicos de la EMF, cuya magnitud es proporcional a la intensidad del campo medido y no está disponible con un ciclo de magnetización simétrica.
Los ferrorsonds se dividen en:
barras de elemento lateral (Fig. A)
Diferencial con núcleo abierto (Fig. B)
Diferencial con un núcleo cerrado (anillo) (Fig. In).
El ferrozond diferencial (Fig. B, b), como regla general, consta de dos núcleos con los devanados, que están conectados de tal manera que los componentes armónicos impares son prácticamente compensados. Por lo tanto, el equipo de medición se simplifica y la sensibilidad del ferrorsond aumenta.
Los ferrorsonds se caracterizan por una sensibilidad muy alta al campo magnético.
Son capaces de registrar campos magnéticos con tensión hasta 10 -4 -10 -5 A / M (~ 10 -10 -10 -11 TL).
Los diseños modernos de los ferrorsonds difieren la compacidad.
El volumen de Ferrorsonond, que completa los magnetómetros domésticos G73, es inferior a 1 cm 3, y el ferrozond de tres componentes para el magnetómetro G74 se ajusta al cubo con un lado de 15 mm.
Como ejemplo en la FIG. Se da el diseño y las dimensiones de la varilla en miniatura Ferrorsond.

El diseño de Ferrorsond es bastante simple y no requiere explicaciones especiales.
Su núcleo está hecho de Permallo.
Tiene una sección transversal de longitud variable, disminuyendo aproximadamente 10 veces en la parte central del núcleo, que se enrolla con el devanado de la medición y el devanado de excitación.
Este diseño proporciona una longitud relativamente pequeña (30 mm) de alta permeabilidad magnética (1, 5x10 5) y un pequeño valor de la intensidad del campo de saturación en la parte central del núcleo, lo que conduce a un aumento en la fase y temporal. Sensibilidad de Ferrorsond. Debido a esto, también se mejora la forma de los pulsos de salida en el devanado de medición del ferrozond, lo que reduce los errores del esquema de formación de señales de "impulso de tiempo".
El rango de medición de los convertidores de ferrozond de un diseño típico es de ± 50 ... ± 100 A / M (± 0, 06 ... ± 0, 126 Mt).
La densidad del ruido magnético en la banda de frecuencia de hasta 0,1 Hz para los ferrorsonds con núcleos de varilla es de 30 a 40 μ / m (m x de Hz 1/2), dependiendo del campo de excitación, disminuyendo con el aumento de este último. En la banda de frecuencia hasta 0,5 Hz, la densidad de ruido es de 3-3.5 veces mayor.
Magnetómetro
Diseñado para medir la inducción del campo magnético. El magnetómetro utiliza un campo magnético de soporte que nos permite a través de ciertos efectos físicos. convertir el campo magnético medido en una señal eléctrica..
Aplicación aplicada de magnetómetros para detectar objetos masivos de materiales ferromagnéticos (de mayor frecuencia, acero) basados \u200b\u200ben la distorsión local por estos objetos del campo magnético de la Tierra. La ventaja de usar los magnetómetros en comparación con los detectores de metales tradicionales es gran rango de detección.
Furrorsonda (vector) magnetometros
Uno de los tipos de magnetómetros son . Ferrorsond fue inventado por Friedrich Festern ( )
En 1937 y sirve para determinar vector de inducción de campo magnético.
Diseño de ferrozond
ferrozhd de un solo iluminado.
El ferrozond más simple consiste en una varilla de permaleoe, que contiene una bobina de excitación (( conducir bobina.), alimentado por la corriente alterna y la bobina de medición ( bobina detector.).
Permalloy - Aleación con propiedades magnéticas y suaves, que consiste en hierro y 45-82% de níquel. Permala tiene una alta permeabilidad magnética (permeabilidad magnética relativa máxima ~ 100,000) y fuerza coercitiva baja. La marca popular para la fabricación de ferrorsonds es el 80% del níquel + cromo y silicio con inducción de saturación 0.65-0.75 tl, utilizada para núcleos de transformadores, choques y relés de tamaño pequeño que trabajan en márgenes débiles de pantallas magnéticas, para núcleos de transformadores de pulsos , Amplificadores magnéticos y relés sin contacto, para núcleos de cabezas magnéticas.
La dependencia de la permeabilidad magnética relativa de la fuerza de campo para algunas variedades de permaloe tiene la forma. 
Si un campo magnético constante se superpone en el núcleo, aparece el voltaje en la bobina de medición incluso Harmonic, la magnitud del cual sirve como medida del campo magnético constante. Este voltaje se filtra y se mide.
two-Barrel Ferroysond

Como ejemplo, puede traer el dispositivo descrito en el libro. Karalysa v.n. "Circuitos electrónicos en la industria" - 

El dispositivo está diseñado para medir los campos magnéticos constantes en el rango de 0.001 ... 0.5 Aleores.
Rodados de excitación del sensor L1. y L3. Los incluidos. Devanado de medición L2. Conectado sobre los devanados de la emoción. Los devanados de excitación se alimentan con una corriente de frecuencia de 2 kHz de un generador de dos tiempos con retroalimentación inductiva. El modo generador está estabilizado por DC Divisory en resistencias. R8. y R9.
furrorsond con un núcleo toroidal.
Una de las opciones de diseño populares para el magnetómetro Ferrozond es un ferrozond con un núcleo toroidal ( anillo Core Fluxgate.) -
Comparado con Rod Ferrozonds, tal diseño tiene ruido más pequeño y requiere creación mucho menos magneto-livastorm..
Este sensor es cuerda de hilbarHerida en un núcleo toroidal, que fluye alternando la corriente con amplitud suficiente para ingresar al núcleo en saturación, y devanado de mediciónCon el que se elimina un voltaje alterno, que se analiza para medir el campo magnético externo.
El devanado de medición se enrolla en la parte superior del núcleo toroidal, cubriéndolo completamente (por ejemplo, en un marco especial) - 
Este diseño es similar al diseño inicial de Ferrorsonds (se agregó el condensador para lograr la resonancia en el segundo armónico). 
El uso de los magnetómetros de protones.
Los magnetómetros de protones son ampliamente utilizados en estudios arqueológicos.
El magnetómetro de protones se menciona en la novela de ciencia ficción Michael Childon "En una trampa" (" Línea de tiempo.") -
Señaló por encima de sus pies. Tres carcasas amarillas pesadas fueron arrastradas a los puntales delanteros del helicóptero. "En este momento estamos transportando mapas de terreno estéreo, infrarrojos, UV y radar de escaneo lateral". Kramer señaló la ventana trasera, hacia un tubo de plata de seis pies de largo que colgaba debajo del helicóptero en la parte trasera ". ¿Y qué es eso?" "Magnetómetro de protones". "Uh-huh. ¿Y hace qué?" "Busca anomalías magnéticas en el suelo debajo de nosotros, así que podría indicar paredes enterradas, o cerámicas, o metal".

Magnetómetros de Cesia
Una variación de los magnetómetros cuánticos son magnetómetros atómicos en metal alcalino con bombeo óptico.
magnetómetro Cesio G-858
Magnetómetros Overhauser
Magnetómetros de estado sólido
Los más accesibles son magnetómetros incrustados en teléfonos inteligentes. Para Androide Una buena aplicación que usa un magnetómetro es . Página de esta aplicación - http://physics-toolbox-magnetomete.android.informer.com/. 
Magnetómetro de configuración
Para probar ferrozona, puede usar. Las bobinas de Helmholtz se utilizan para obtener un campo magnético prácticamente homogéneo. En el caso ideal, son dos giros de anillo idénticos conectados entre sí secuencialmente y ubicados a una distancia del radio de la bobina entre sí. Por lo general, las bobinas del Helmholtz consisten en dos bobinas, en las que se suspenden varias vueltas, y el grosor de la bobina debe ser mucho menor que su radio. En sistemas reales, el grosor de la bobina puede ser comparable a su radio. Por lo tanto, podemos considerar que el sistema de anillos de Helmholtz dos ubicó coaxialmente las mismas bobinas, la distancia entre los centros de los cuales es aproximadamente igual a su radio promedio. Tal sistema de bobinas también se llama el solenoide dividido ( solenoide dividido).
En el centro del sistema hay una zona de un campo magnético homogéneo (el campo magnético en el centro del sistema en la cantidad de 1/3 del radio de los anillos. uniformemente dentro del 1%), que se puede usar para fines de medición, para calibrar los sensores de inducción magnética, etc. 
La inducción magnética en el centro del sistema se define como $ b \u003d \\ mu _0 \\, (\\ \\ \\ \\ pie izquierdo)) ^ (3/2) \\, (en \\ sobre r) $
Donde $ N $ es el número de giros en cada bobina, $ I $ - Corriente a través de las bobinas, $ R $ es el radio promedio de la bobina.
Además, las bobinas del Helmholtz se pueden usar para proteger el campo magnético de la Tierra. Para hacer esto, es mejor usar tres pares mutuamente perpendiculares de los anillos, entonces su orientación no importa.
El magnetómetro diferencial propuesto puede ser muy útil para buscar artículos de hierro grandes. Tal dispositivo es casi imposible de buscar tesoros, pero es indispensable cuando busque un tanque, barcos y otras muestras de equipos militares poco profundos.
El principio de funcionamiento del magnetómetro diferencial es muy simple. Cualquier artículo del Ferromagnet distorsiona el campo magnético natural de la tierra. Tales sujetos incluyen todo hecho de hierro, hierro fundido y acero. En gran medida, afectar la distorsión del campo magnético también puede tener su propia magnetización de objetos, que a menudo tienen lugar. Fijación de la desviación de la fuerza del campo magnético desde el valor de fondo, se puede concluir que está cerca del instrumento de medición del objeto del material ferromagnético.
La distorsión del campo magnético de la Tierra lejos del objetivo no es suficiente, y se estima en la diferencia en las señales de dos sensores de su lado espacial. Por lo tanto, el dispositivo también se denomina diferencial. Cada sensor mide la señal, la fuerza del campo magnético proporcional. Los sensores y sensores ferromagnéticos basados \u200b\u200ben la precesión del magnólogo de protones se obtuvieron la mayor distribución. En el instrumento bajo consideración, se utilizan los sensores de primer tipo.
La base del sensor ferromagnético (también llamado Ferrorsonondo) es una bobina con un núcleo de material ferromagnético. La curva de magnetización típica de dicho material es bien conocido desde el curso de la escuela de la escuela y tiene la siguiente forma, teniendo en cuenta la influencia del campo magnético de la Tierra, que se muestra en la FIG. 29.
Higo. 29. Curva de magnetización.
La bobina está emocionada por una señal de frecuencia de cojinete sinusoidal variable. Como se puede ver en la FIG. 29, el desplazamiento de la curva de magnetización del núcleo ferromagnético de la bobina por un campo magnético exterior de la tierra conduce al hecho de que la inducción del campo y el voltaje asociado en la bobina comienza a distorsionarse de manera asimétrica. En otras palabras, el voltaje del sensor en la corriente sinusoidal de la frecuencia portadora diferirá de los sinusoides más "entregados" las tops de la mitad cayó. Y estas distorsiones serán asimétricas. En el lenguaje de análisis espectral, esto significa la apariencia en el espectro del voltaje de salida de la bobina de incluso armónicos, cuya amplitud es proporcional a la tensión del campo magnético del desplazamiento (campo de la tierra). Estos son incluso armónicos y necesitas "atrapar".

Higo. 30. Sensor ferromagnético diferencial.
Antes de mencionar un detector síncrono configurado de forma natural, trabajar con una señal de referencia de frecuencia de cojinetes dudada, considere el diseño de la versión complicada del sensor ferromagnético. Consta de dos núcleos y tres bobinas (Fig. 30). En esencia, este es un sensor diferencial. Sin embargo, para la simplicidad, no se llamará diferencial en el texto, ya que el magnetómetro en sí ya es diferencial (©).
El diseño consta de dos núcleos ferromagnéticos idénticos con bobinas idénticas ubicadas en paralelo entre sí. En relación con la emocionante señal eléctrica de la frecuencia de referencia, se incluyen en el mostrador. La tercera bobina es una herida enrollada sobre dos plegadas juntas las primeras dos bobinas con núcleos. En ausencia de un campo magnético de cambio externo, las señales eléctricas de los bobinados primero y segundo son simétricos y, en el caso ideal, actúan de modo que faltan la señal de salida en el tercer devanado, ya que los flujos magnéticos están completamente compensados. eso.
Si hay un campo magnético de cambio externo, la imagen cambia. Luego, uno, luego otro núcleo en el pico de la "aleteo" de la media onda correspondiente en la saturación más profunda de lo habitual debido a la adición del campo magnético de la Tierra. Como resultado, en la salida del tercer devanado, aparece un desajuste de frecuencia de desvío. Las señales de la armónica principal idealmente son completamente compensadas.
La conveniencia del sensor considerada es que se pueden incluir sus bobinas para aumentar la sensibilidad al circuito oscilatorio. El primer y segundo en el circuito oscilante (o contorno) configurado a la frecuencia del portador. El tercero es un contorno vibratorio configurado a la segunda armónica.
El sensor descrito tiene un patrón pronunciado de la orientación. Su salida es máximo en la ubicación del eje longitudinal del sensor a lo largo de las líneas eléctricas del campo magnético permanente externo. Cuando el eje longitudinal es perpendicular a las líneas eléctricas: la señal de salida es cero.
El sensor del tipo considerado, especialmente junto con el detector síncrono, puede funcionar con éxito como una brújula electrónica. Su salida después de enderezar es proporcional a la proyección del campo magnético del campo magnético de la Tierra en el eje del sensor. La detección síncrona le permite aprender y firmar esta proyección. Pero incluso sin un signo, orientado al sensor a un mínimo de la señal, recibiremos la dirección hacia el oeste o al este. Orientado al máximo: obtenemos la dirección de la línea eléctrica magnética del campo de la Tierra. En latitudes medianas (por ejemplo, en Moscú), se produce oblicuamente y "sobresale" al suelo hacia el norte. En la esquina del declive magnético, puede evaluar aproximadamente la latitud geográfica del terreno.
Los magnetómetros ferromagnéticos diferenciales tienen sus ventajas y desventajas. Las ventajas incluyen la simplicidad del dispositivo, no es más complicado por una radio de fortalecimiento directo. Las desventajas incluyen la complejidad de la fabricación de sensores, además de la precisión, se requiere una coincidencia absolutamente precisa del número de giros de los devanados correspondientes. El error de una o dos vueltas puede reducir fuertemente la posible sensibilidad. Otra desventaja es la "brújula" del dispositivo, es decir, la imposibilidad de una compensación completa del campo de la Tierra al restar señales de dos sensores espaciados. En la práctica, esto conduce a señales falsas cuando el sensor gira alrededor del eje perpendicular al longitudinal.
Diseño práctico
El diseño práctico del magnetómetro ferromagnético diferencial se implementó y se probó en una versión de dumping sin una pieza electrónica especial para la indicación de sonido, utilizando solo un microamémetro con cero en el centro de la escala. El circuito de indicación de sonido se puede tomar de la descripción del detector de metales en el principio de "recepción de transmisión". El dispositivo tiene los siguientes parámetros.
Características técnicas principales.
Voltaje de suministro 15 ... 18 V
Consumo de corriente no más de 50 mA
Profundidad de detección:
pISTOL 2 M.
vástago de cañón 4 m
tANQUE 6 M.
Esquema estructural

Higo. 31. Diagrama estructural de un magnetómetro ferromagnético diferencial.
El esquema estructural se muestra en la FIG. 31. CUESTIONES DE GENERADOR DE SPRILANZA ESTABILIDADOS DE CUTIMIZ CUESTIONES Sincrones de frecuencia de reloj para el generador de señales.
En una salida, hay un serpente de la primera armónica, que llega al amplificador de potencia, los emocionantes bobinas de sensores radiantes 1 y 2. Otra salida genera un serpente de la frecuencia de reloj dudada con un cambio de 60 ° para un detector síncrono. La señal de diferencia de la salida (tercera) devanadas de los sensores se amplifica en el amplificador de recepción y se endereza con un detector síncrono. La señal permanente enderezada se puede registrar mediante un microamémetro o descrito en los capítulos anteriores de dispositivos de indicación de sonido.
Esquema esquemático
El diagrama esquemático del magnetómetro ferromagnético diferencial se representa en la FIG. 32 - Parte 1; Especificación de generador, generador de señales, amplificador de potencia y bobinas emisoras, FIG. 33 - Parte 2: bobinas de recepción, amplificador de recepción, detector síncrono, indicador y fuente de alimentación.

Higo. 32. Concepto Esquema eléctrico - Parte I
Especificación del generador (Fig. 32)
El generador de especificación se ensamblan en los inversores D1.1-D1.3. La frecuencia del generador se está estabilizada por un resonador de cuarzo o sub-zocherámico Q con una frecuencia resonante de 215 Hz \u003d 32 kHz ("cuarzo de hora"). La cadena R1C1 previene la excitación del generador en armónicos más altos. A través de la resistencia R2, el circuito de la OOS está cerrado, a través del resonador Q -Cile Pic. El generador se caracteriza por simplicidad, corriente pequeña, funciona de manera confiable a una tensión de alimentación de 3 ... 15 b, no contiene elementos recortados y resistencias demasiado resistentes al alto. La frecuencia de salida del generador es de aproximadamente 32 kHz.
Antigua señal (Fig. 32)
El generador de señales se ensamblan en un contador binario D2 y D3.1 D3.1 D-disparo. El tipo de medidor binario no es suficiente, su tarea principal es dividir la frecuencia del reloj por 2, por 4 y por 8, así obtenida, meandras con frecuencias 16, 8 y 4 kHz, respectivamente. Frecuencia portadora para la excitación de las bobinas emisoras-4 kHz. Señales con frecuencias 16 y 8 kHz, que afectan al gatillo D D3.1, forman en su salida del meandro se duplicó a la frecuencia portadora de 8 kHz, cambió 90 ° con respecto a la señal de salida del medidor binario de 8 kHz. Dicho cambio es necesario para el funcionamiento normal del detector síncrono, ya que el mismo cambio tiene un trastorno beneficioso de la doble frecuencia en la salida del sensor. La segunda mitad del chip de dos activadores D - D3.2 en el diagrama no se utiliza, pero sus entradas no utilizadas deben conectarse a lógico 1, o a 0 lógico para operación normal, como se muestra en el diagrama.
Amplificador de potencia (Fig. 32)
El amplificador de potencia con vista no parece probable y representa solo los poderosos inversores D1.4 y D1.5, que en la antifase dividieron un circuito oscilatorio que consiste en encendido secuencialmente en paralelas en las bobinas de radiación del sensor y el condensador C2. Un asterisco cerca de la calificación del condensador significa que su valor se indica aproximadamente y que debe elegirse al ajustar. Un inversor no utilizado D1.6 para no dejar su insumo incontemente, invierta la señal D1.5, pero prácticamente la "rápida". Las resistencias R3 y R4 limitan la corriente de salida de los inversores a un nivel permisible y junto con el contorno oscilatorio forman un filtro de tira de alto riesgo, de modo que la forma de voltaje y la corriente en las bobinas de sensores emisoras casi coincide con el sinusoidal.

Higo. 33. El esquema eléctrico fundamental es parte II. Amplificador receptor
Amplificador del receptor (Figura 33)
El amplificador de recepción mejora la señal de diferencia que proviene de las bobinas receptoras del sensor formando junto con el condensador del circuito oscilante, configurado a la frecuencia dos veces de 8 kHz. Debido a la resistencia rápida R5, la resta de señales de las bobinas de recepción se realiza con algunos coeficientes de pesaje, que pueden variar al mover el motor de resistencia R5. Esto viene una compensación por la no identidad de los parámetros de los devanados de recepción del sensor y minimizando su "compasibilidad". Amplificador de recepción de doble etapa. Se ensambla para OU D4.2 y D6.1 con voltaje paralelo del sistema operativo. El condensador C4 reduce la amplificación a frecuencias más altas, evitando así el refuerzo de la ruta de amplificación con consejos de alta frecuencia de las redes de energía y otras fuentes. OU - Circuitos de corrección estándar.
Detector síncrono (Fig. 33)
El detector síncrono se realiza en la OU D6.2 de acuerdo con el esquema típico. Como una clave analógica, se usa un multiplexor Multiplexor-Multiplexer-Multiplexer 8 a 1 (Fig. 32). Su señal de dirección digital se desplaza solo en la descarga más joven, proporcionando una conmutación alternativa de puntos K1 y K2 en un neumático total. La señal enderezada se filtra por el condensador C8 y el D6.2 se mejora con la atenuación adicional simultánea de los componentes RF no filtrados R14C11 y R13C9. El circuito de corrección OU es estándar para el tipo usado.
Indicador (Fig. 33)
El indicador es un micro amperímetro con cero en medio de la escala. En la parte indicadora, los circuitos de los detectores metálicos descritos anteriormente de otros tipos se pueden usar con éxito. Incluyendo, como indicador, puede usar el diseño del detector de metales en el principio de un medidor de frecuencia electrónico. En este caso, su generador de LC se reemplaza con un generador RC, y el voltaje de salida medido a través del divisor resistivo se alimenta a la cadena de frecuencia del temporizador. Puedes leer más sobre esto en el sitio web de Yuri Kolokolov.
El chip D7 estabiliza un voltaje de suministro de un solo polar. Con la ayuda de OU D4.1, se crea un punto de alimentación promedio artificial, lo que permite el uso de una ingeniería de circuito bipolar convencional para OU. Los condensadores de bloqueo de cerámica C18-C21 están montados en las inmediaciones de las carcasas de chip digital D1, D2, D3, D5.
Tipos de detalles y diseño.
Los tipos de microcircuitos utilizados se indican en la tabla. 6.
Tabla 6. Tipos de microcircuitos utilizados.
En lugar del chip de la serie K561, es posible utilizar los microcircuitos de la serie K1561. Puede intentar aplicar algunas fichas de serie K176 o análogos extranjeros de 40xx y 40xx.
Los amplificadores de operación dual (OU) de la serie K157 pueden reemplazarse por cualquier similar a los parámetros del propósito general (con los cambios apropiados en los circuitos del sótano y la corrección).
Las resistencias no se presentan a las resistencias utilizadas en el diagrama diferencial del magnetómetro. Solo necesitan tener un diseño sólido y en miniatura y ser convenientes para la instalación. Potencia ratar de 0.125 ... 0.25 W.
Los potenciómetros R5, R16 se desean multi-giro para la comodidad de la configuración de instrumentos precisa. La manija del potenciómetro R5 debe estar hecha de plástico y debe tener una longitud suficiente para que el toque a mano del operador no cause cambios en las lecturas del indicador presionando. Condensador C16 - electrolítico cualquier tipo de tamaño pequeño.
Los condensadores de contornos oscilatorios C2 * y SZ * consisten en varios (5-10 PC.) Capacitores incluidos en paralelo. Ajustar el contorno en la resonancia se realiza seleccionando el número de condensadores y su nominal. Tipo recomendado de capacitores K10-43, K71-7 o contrapartes termoestables extranjeros. Sin embargo, puede intentar usar capacitores de cerámica o metal convencionales, sin embargo, cuando la temperatura es de las oscilaciones, será necesario ajustar el dispositivo con más frecuencia.
Micronmmeter: cualquier tipo de corriente 100 μA con cero en el centro de la escala. Convenientes microamétricos de tamaño pequeño, por ejemplo, tipo M4247. Puede usar casi cualquier microamémetro, e incluso un Milliammeter, con cualquier límite de la escala. Para hacer esto, es necesario ajustar correctamente las tasas de las resistencias R15-R17. Resonador de cuarzo Q - Cualquier cuarzo de pequeña hora (similar a los utilizados en juegos electrónicos portátiles).
Interruptor S1 - Cualquier tipo, pequeño.

Higo. 34. Construcción de un sensor de antena.
Las bobinas del sensor se realizan en los núcleos de ferrita redondos con un diámetro de 8 mm (usados \u200b\u200ben antenas magnéticas de radio y receptores de radio de rango de radio DW) y aproximadamente 10 cm de largo. Cada devanado consiste en con suavidad y estrechamente heridos en dos capas de 200 vueltas de la Alambre de devanado de cobre con un diámetro de 0,31 mm. En un aislamiento de doble barniz-seda. En la parte superior de todos los devanados, se adjunta la capa de la lámina de la pantalla. Los bordes de la pantalla se aíslan entre sí para evitar la formación de un giro cortocircuitado. La salida de la pantalla se realiza mediante alambre de un solo núcleo de cobre. En el caso de una pantalla de lámina de aluminio, esta salida se aplica a la pantalla durante toda su longitud y está apretado firmemente por la cinta. En el caso de una pantalla de una lámina de cobre o latón, la salida es soldadura.
Los extremos de los núcleos de ferrita se fijan en los discos centrados con fluoroplásticos, gracias a los cuales cada una de las dos mitades del sensor se mantiene dentro de un tubo de plástico de una textolita que sirve el caso, como se muestra esquemáticamente en la FIG. 34. La longitud de la tubería es de aproximadamente 60 cm. Cada una de las mitades del sensor se encuentra al final de la tubería y se registra adicionalmente por hermetos de silicona, que se llena por el espacio alrededor de los devanados y sus núcleos. Relleno a través de agujeros especiales en la carcasa de la tubería. Junto con las arandelas fluoroplásticas, un sellador de este tipo le da la sujeción de varillas de ferrita frágiles la elasticidad necesaria que los impide en agrietarse durante los golpes accidentales.
Estableciendo el dispositivo
1. Asegúrese de que la instalación sea correcta.
2. Controle la corriente consumida, que no debe exceder los 100 mA.
3. Verifique el funcionamiento correcto del generador de especificación y los elementos restantes de la formación de señales de pulso.
4. Personaliza el circuito del sensor oscilatorio. Emitiendo - sobre la frecuencia de 4 kHz, recibiendo - en 8 kHz.
5. Asegure la corrección de la ruta mejorada y el detector síncrono.
Trabajar con el dispositivo
El método de configuración y trabajo con el dispositivo es el siguiente. Vamos a lugar de búsqueda, encienda el dispositivo y comencemos a girar la antena del sensor. Lo mejor de todo en el plano vertical que pasa por la dirección norte-sur. Si el sensor del dispositivo está en la varilla, entonces no puede girar, sino que rockee hasta que le permita hacer una barra. La flecha indicadora se desviará (efecto de la brújula). Usando una resistencia variable R5, estamos tratando de minimizar la amplitud de estas desviaciones. Se "moverá" el punto medio de las lecturas del microamétrico y también deberá ajustarse a otra resistencia de R16 variable, que está diseñada para establecer cero. Cuando el efecto "Compass" se vuelve mínimo, el dispositivo se considera equilibrado.
Para objetos pequeños, la técnica de búsqueda que utiliza un magnetómetro diferencial no difiere de la técnica de trabajar con un detector de metales convencionales. Cerca del objeto, la flecha puede desviarse en cualquier dirección. Para objetos grandes, la flecha indicadora se desviará en diferentes direcciones en un espacio grande.
 Magnetometría en la versión más sencilla El Ferrozond consiste en un núcleo ferromagnético y dos bobinas en él
Magnetometría en la versión más sencilla El Ferrozond consiste en un núcleo ferromagnético y dos bobinas en él Búsqueda de curso de búsqueda de trabajo efectivo
Búsqueda de curso de búsqueda de trabajo efectivo Las principales características y parámetros del fotodiodo.
Las principales características y parámetros del fotodiodo. Cómo editar PDF (cinco aplicaciones para cambiar archivos PDF) Cómo eliminar páginas individuales de PDF
Cómo editar PDF (cinco aplicaciones para cambiar archivos PDF) Cómo eliminar páginas individuales de PDF ¿Por qué la ventana del programa de despedida se desarrolla durante mucho tiempo?
¿Por qué la ventana del programa de despedida se desarrolla durante mucho tiempo? DXF2TXT - Exportación y traducción del texto desde AutoCAD para mostrar un punto de tráfico DWG en TXT
DXF2TXT - Exportación y traducción del texto desde AutoCAD para mostrar un punto de tráfico DWG en TXT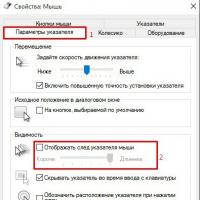 Qué hacer si el cursor del mouse desaparece.
Qué hacer si el cursor del mouse desaparece.