Збери робота який буде допомагати таким людям. Роботи на службі людей: винаходи, готові допомагати людині в повсякденному житті Збери робота який буде допомагати
Бути людиною куди простіше, ніж створити людину. Візьміть, наприклад, процес гри в м'яч в дитинстві з одним. Якщо розкласти цю діяльність на окремі біологічні функції, гра перестане бути простою. Вам потрібні датчики, передавачі і ефектори. Вам потрібно розраховувати, як сильно бити по м'ячу, щоб він скоротив дистанцію між вами і вашим компаньйоном. Вам потрібно враховувати сонячні відблиски, швидкість вітру і все, що може відвернути. Потрібно визначити, як обертається м'яч і як потрібно його приймати. І залишається простір для сторонніх сценаріїв: що, якщо м'яч пролетить над головою? Перелетить через паркан? Виб'є вікно сусіда?
Ці питання демонструють деякі з найбільш гострих проблем робототехніки, а також закладають основу для нашого зворотного відліку. Перед вами список з десяти найбільш складних речей, яким потрібно навчити роботів. Цю десятку ми повинні перемогти, якщо коли-небудь хочемо реалізувати обіцянки, зроблені Бредбері, Дикому, Азімовим, Кларком та іншими фантастами, які бачили уявні світи, де машини поводяться як люди.

Пересування з точки А в точку Б здавалося нам простим з дитинства. Ми, люди, робимо це щодня, щогодини. Для робота, однак, навігація - особливо через єдине середовище, яка постійно змінюється, або через середу, яку він раніше не бачив - дуже складна річ. По-перше, робот повинен бути здатний сприймати навколишнє середовище, а також розуміти всі вхідні дані.
Робототехніки вирішують першу проблему, озброюючи свої машини масивом датчиків, сканерів, камер і інших високотехнологічних інструментів, які допомагають роботам оцінити своє оточення. Лазерні сканери стають все більш популярними, хоча їх не можна використовувати у водному середовищі через те, що світло серйозно спотворюється в воді. Технологія сонара здається життєздатною альтернативою для підводних роботів, але в наземних умовах вона куди менш точна. Крім того, «бачити» свій пейзаж роботу допомагає система технічного зору, що складається з набору інтегрованих стереоскопічних камер.
Зібрати дані про навколишнє середовище - це тільки півсправи. Куди більш складним завданням буде обробка цих даних і використання їх для прийняття рішень. Багато розробники керують своїми роботами, використовуючи визначену карту або складаючи її на льоту. В робототехніці це відомо як SLAM - метод одночасної навігації і складання карти. Складання карти тут означає те, як робот перетворює інформацію, отриману датчиками, в певну форму. Навігація же має на увазі те, як робот позиціонує себе щодо карти. На практиці ці два процеси повинні протікати одночасно, в формі «курки і яйця», що здійснимо тільки при використанні потужних комп'ютерів і просунутих алгоритмів, що обчислюють положення на основі ймовірностей.
продемонструвати спритність

Роботи збирають упаковки і деталі на заводах і складах вже багато років. Але в таких ситуаціях вони, як правило, не зустрічаються з людьми і практично завжди працюють з однаковими за формою об'єктами в щодо вільної середовищі. Життя такого робота на заводі нудна і пересічна. Якщо ж робот хоче працювати на дому або в лікарні, для цього йому знадобиться володіти просунутим дотиком, здатністю виявляти людей поблизу і бездоганний смак в плані вибору дій.
Цим навичкам робота вкрай складно навчити. Зазвичай вчені взагалі не навчають роботів дотиків, програмуючи їх на провал, якщо вони вступають в контакт з іншим об'єктом. Однак за останні п'ять років або близько того були досягнуті значні успіхи в поєднанні піддатливих роботів і штучної шкіри. Податливість відноситься до рівня гнучкості робота. Гнучкі машини більш податливі, жорсткі - менш.
У 2013 році дослідники з Georgia Tech створили роботизований маніпулятор з пружинними суглобами, які дозволяють маніпулятору згинатися і взаємодіяти з предметами, подібно людській руці. Потім вони покрили все це «шкірою», здатної розпізнавати тиск або дотик. Деякі види шкіри роботів містять шестигранні мікросхеми, кожна з яких оснащена інфрачервоним сенсором, який реєструє будь-яке наближення ближче ніж на сантиметр. Інші оснащуються електронними «відбитками пальців» - ребристою і шорсткою поверхнею, яка поліпшує зчеплення і полегшує обробку сигналу.
Об'єднайте ці високотехнологічні маніпулятори з просунутою системою зору - і ви отримаєте робота, який може зробити ніжний масаж або перебрати папку з документами, вибравши потрібний з величезної колекції.
Підтримати розмову

Алан Тьюринг, один із засновників комп'ютерної науки, зробив в 1950 році сміливий прогноз: одного разу машини зможуть говорити так вільно, що ви не зможете відрізнити їх від людей. На жаль, поки роботи (і навіть Siri) не виправдали очікувань Тьюринга. Все тому, що розпізнавання мови значно відрізняється від обробки природної мови - то, що роблять наші мізки, витягуючи сенс з слів і пропозицій в процесі бесіди.
Спочатку вчені думали, що повторити це буде так само просто, як підключити правила граматики до пам'яті машини. Але спроба запрограмувати граматичні приклади для кожного окремого мови попросту провалилася. Навіть визначити значення окремих слів виявилося досить складно (адже є таке явище, як омоніми - ключ від дверей і ключ скрипковий, наприклад). Люди навчилися визначати значення цих слів в контексті, спираючись на свої розумові здібності, розвинені за багато років еволюції, але розбити їх знову на суворі правила, які можна покласти на код, виявилося просто неможливо.
В результаті багато роботи сьогодні обробляють мову, грунтуючись на статистиці. Вчені згодовують їм величезні тексти, відомі як корпуси, а потім дозволяють комп'ютерам розбивати довгі тексти на шматки, щоб з'ясувати, які слова часто йдуть разом і в якому порядку. Це дозволяє роботу «вчити» мову, грунтуючись на статистичному аналізі.
навчитися новому

Уявімо, що хтось, хто ніколи не грав в гольф, вирішив навчитися розмахувати ключкою. Він може прочитати книгу про це, а потім спробувати або ж спостерігати за тим, як практикується відомий гольфіст, і потім спробувати самостійно. У будь-якому випадку освоїти ази можна буде просто і швидко.
Робототехніки стикаються з певними проблемами, коли намагаються побудувати автономну машину, здатну навчатися новим навичкам. Один з підходів, як у випадку з гольфом, полягає в тому, щоб розбити активність на точні кроки, а потім запрограмувати їх в мозку робота. Це передбачає, що кожен аспект активності потрібно розділити, описати і закодувати, що не завжди-то й легко зробити. Існують певні аспекти в розмахуванні ключкою для гольфу, які і словами-то складно описати. Наприклад, взаємодія зап'ястя і ліктя. Ці тонкі деталі легше показати, ніж описати.
За останні роки вчені домоглися певного успіху в навчанні роботів імітувати людини-оператора. Вони називають це імітаційним навчанням, або навчанням по демонстрації (методика LfD). Як вони це роблять? Озброюють машини масивами ширококутних і масштабуючих камер. Це обладнання дозволяє роботу «бачити» вчителя, що виконує певні активні процеси. Навчальні алгоритми обробляють ці дані для створення математичної карти функцій, яка об'єднує візуальний введення і бажані дії. Звичайно, роботи LfD повинні вміти ігнорувати певні аспекти поведінки свого вчителя - на кшталт свербежу або нежиті - і справлятися зі схожими проблемами, які народжуються з-за різниці в анатомії робота і людини.
обманювати

Цікаве мистецтво обману розвивалося ще у тварин, щоб обійти конкурентів і не бути з'їденим хижаками. На практиці обман як мистецтво виживання може бути вельми і вельми ефективним механізмом самозбереження.
Роботам же навчитися обманювати людей або інших роботів може бути неймовірно складно (і, можливо, добре для нас з вами). Обман вимагає наявності уяви - здатності формувати ідеї або образи зовнішніх об'єктів, не пов'язаних з почуттями - а у машини його, як правило, немає. Вони сильні в прямій обробці даних з датчиків, камер і сканерів, але не можуть формувати концепції, які виходять за межі сенсорних даних.
З іншого боку, роботи майбутнього можуть краще розбиратися в обмані. Вчені Georgia Tech змогли передати деякі навички обману білок роботам в лабораторії. Спочатку вони вивчали хитрих гризунів, які захищають свої схованки з їжею, заманюючи конкурентів в старі і невикористовувані сховища. Потім закодували це поведінка в прості правила і завантажили в мізки своїх роботів. Машини змогли використати ці алгоритми для визначення, коли обман може бути корисним в конкретній ситуації. Отже, могли обдурити свого компаньйона, заманивши його в інше місце, в якому немає нічого цінного.
Передбачати дії людини

У «Джетсонів» робот-покоївка Розі була в змозі підтримувати бесіду, готувати їжу, прибирати і допомагати Джорджу, Джейну, Джуді і Елрою. Щоб зрозуміти якість збірки Розі, досить згадати один з початкових епізодів: містер Спейслі, бос Джорджа, приходить в будинок Джетсонів на вечерю. Після трапези він виймає сигару і поміщає її в рот, а Розі кидається вперед з запальничкою. Це проста дія являє собою складну поведінку людини - вміння передбачати, що буде далі, на основі того, що тільки що відбулося.
Як і обман, передбачення людських дій вимагає від робота уявлення майбутнього стану. Він повинен бути в змозі сказати: «Якщо я бачу, що людина робить А, значить, як я можу припустити на основі минулого досвіду, швидше за все, він зробить Б». В робототехніці цей пункт був вкрай складним, але люди роблять певний прогрес. Команда Корнельського університету розробила автономного робота, який міг реагувати на основі того, як компаньйон взаємодіє з об'єктами навколишнього середовища. Для цього він використовує пару 3D-камер, щоб отримати зображення оточення. Потім алгоритм визначає ключові об'єкти в кімнаті і виділяє їх на тлі інших. Потім, використовуючи величезну кількість інформації, отриманої в результаті попередніх тренувань, робот виробляє набір певних очікувань рухів від персони і об'єктів, які вона чіпає. Робот робить висновки щодо того, що буде далі, і діє відповідно.
Іноді Корнельському роботи помиляються, але досить впевнено просуваються вперед, в тому числі і в міру того, як поліпшуються технології камер.
Координувати діяльність з іншими роботами

єдиної великомасштабної машини - навіть андроїда, якщо хочете - вимагає серйозних вкладень часу, енергії та грошей. Інший підхід передбачає розгортання армії з простіших роботів, які можуть діяти разом для досягнення складних задач.
Виникає ряд проблем. Робот, що працює в команді, повинен вміти добре себе позиціонувати в зв'язку з товаришами і бути в змозі ефективно спілкуватися - з іншими машинами і оператором-людиною. Для вирішення цих проблем вчені звернулися до світу комах, які використовують складне ройовий поведінку для пошуку їжі і вирішують завдання, які приносять користь всієї колонії. Наприклад, вивчаючи мурах, вчені зрозуміли, що окремі особини використовують феромони для зв'язку один з одним.
Роботи можуть використовувати цю ж «феромоновими логіку», тільки покладатися на світло, а не на хімічні речовини, при спілкуванні. Працює це так: група крихітних роботів розосереджена в обмеженому просторі. Спочатку вони досліджують цю область випадковим чином, поки один не натикається на світловий слід, залишений іншим ботом. Він знає, що потрібно йти по сліду, і йде, залишаючи свій слід. У міру того як сліди зливаються в один, все більше і більше роботів слідують один за одним за одним.
самокопіюватися

Господь сказав Адаму і Єві: «Плодіться і розмножуйтеся, і наповнюйте землю». Робот, який отримав би таку команду, відчув би збентеження або розчарування. Чому? Тому що він не здатний розмножуватися. Одна справа побудувати робота, але зовсім інше - створити робота, який зможе робити копії самого себе або регенерувати втрачені або пошкоджені компоненти.
Що примітно, роботи можуть і не брати людей за приклад репродуктивної моделі. Можливо, ви помітили, що ми не ділимося на дві однакові частини. Найпростіші, однак, роблять це постійно. Родичі медуз - гідри - практикують форму безстатевого розмноження, відому як бутонізації: невелику кульку відділяється від тіла батька, а потім відривається, щоб стати новим, генетично ідентичним індивідуумом.
Вчені працюють над роботами, які зможуть виконувати таку ж просту процедуру клонування. Багато з цих роботів побудовані з повторюваних елементів, як правило кубів, які зроблені за образом і подобою одного куба, а також містять програму самореплікаціі. У кубиків є магніти на поверхні, тому вони можуть приєднуватися і від'єднуватися від інших кубів поблизу. Кожен кубик ділиться на дві частини по діагоналі, тому кожна половина може існувати незалежно. Весь же робот містить кілька кубиків, зібраних в певну фігуру.
Діяти з принципу

Коли ми щодня спілкуємося з людьми, ми приймаємо сотні рішень. У кожному з них ми зважуємо кожен наш вибір, визначаючи, що є добре, а що є погано, чесно і нечесно. Якби роботи хотіли бути схожі на нас, їм потрібно було б зрозуміти етику.
Але як і в випадку з мовою, закодувати етичну поведінку вкрай складно головним чином тому, що єдиного набору загальноприйнятих етичних принципів не існує. У різних країнах існують різні правила поведінки і різні системи законів. Навіть в окремих культурах регіональні відмінності можуть вплинути на те, як люди оцінюють і вимірюють свої дії і дії оточуючих. Спроба написати глобальну і відповідну всім роботам етику виявляється практично неможливою.
Саме тому вчені вирішили створювати роботів, обмежуючи масштаби етичної проблеми. Наприклад, якщо машина буде працювати в певному середовищі - на кухні, скажімо, чи в палаті пацієнта - у неї буде набагато менше правил поведінки і менше законів для ухвалення етично обґрунтованих рішень. Для досягнення цієї мети інженери-робототехніки вводять заснований на етиці вибір в алгоритм навчання машини. Вибір цей грунтується на трьох гнучких умовах: до чого хорошого призведе дія, якої шкоди воно завдасть і міру справедливості. Використовуючи цей тип штучного інтелекту, ваш майбутній домашній робот зможе точно визначити, хто в родині повинен мити посуд, а кому дістанеться пульт від телевізора на ніч.
відчувати емоції

«Ось мій секрет, він дуже простий: пильно одне лише серце. Найголовнішого очима не побачиш ».
Якщо це зауваження Лиса з «Маленького принца» Антуана де Сент-Екзюпері вірно, то роботи не побачать самого прекрасного і кращого в цьому світі. Зрештою, вони відмінно зондують світ навколо, але не можуть перетворювати сенсорні дані в конкретні емоції. Вони не можуть побачити усмішку коханої людини і відчути радість, або ж зафіксувати гнівну гримасу незнайомця і затремтіти від страху.
Саме це, більше ніж будь-що інше в нашому списку, відокремлює людини від машини. Як навчити робота закохуватися? Як запрограмувати розчарування, відраза, подив або жалість? Чи варто взагалі намагатися?
Деякі думають, що варто. Вони вважають, що роботи майбутнього будуть поєднувати когнітивні й емоційні системи, а значить, краще працювати, швидше вчитися і ефективніше взаємодіяти з людьми. Вірте чи ні, прототипи таких роботів вже існують, і вони можуть висловлювати обмежений діапазон людських емоцій. Nao, робот, розроблений європейськими вченими, має емоційними якостями однорічної дитини. Він може виражати щастя, злість, страх і гордість, супроводжуючи емоції жестами. І це тільки початок.
Людина на виконання таких одноманітних і монотонних домашніх робіт, як прибирання приміщення або роботи в саду, витрачає значну частину свого часу. Деякі отримують від подібного роду занять справжнє задоволення, але для більшості приведення житлового простору в належний порядок є завданням рутинної, нудною і не дуже приємною. Починаючи з 50-60-х років минулого століття, коли тільки почало зароджуватися поняття «роботизований помічник», суспільство вже щосили мріяло перекласти частину своїх повсякденних обов'язків на бездушне механізоване пристрій, не схильне до втоми, стресів і готове виконати найбруднішу роботу. Мова йде про роботів-слуг і автоматизованих помічників, прототипи яких з'явилися більш ніж півстоліття тому.

Перший мобільний робот, який аналізує команди і свої дії
У 1966 році інженери Центру Штучного інтелекту при Стенфордському університеті взялися за створення робота, наділеного здатністю самостійного орієнтування і пересування в приміщенні без створення аварійних ситуацій. Проект передбачав розробку конструкції на колісному шасі з можливістю самонавчання, а також цілісного аналізу поставлених перед машиною завдань.

Пристрій, що одержав назву Shakey, оснащувалося набором датчиків і телекамерою для визначення поточного місцезнаходження і габаритів оточуючих робота предметів. У 1972 році проект Shakey підійшов до завершення, втіливши в єдиній конструкції передові досягнення інженерів того часу. Мобільний пристрій демонструвало свої можливості в спеціальному тестовому павільйоні з декількох кімнат, пов'язаних між собою коридорами. Робот виконував команди вчених, штовхаючи різні предмети, закриваючи і відкриваючи двері, взаємодіючи з вимикачами і різними об'єктами.
Перспективність закладеного в Shakey алгоритму підштовхнула вчених до подальших робіт в даному напрямку і створення ряду більш досконалих автоматизованих механізмів, а також впровадженню здатності у подібного роду пристрої ідентифікувати і реагувати на голосові команди.
.png)
Бездротова та автономна стрижка галявини
У 1969 році фірма MowBot Inc. представила світу роботизовану газонокосарку, яка функціонує від вбудованого акумулятора без необхідності підключення до домашньої мережі. Заряду батареї вистачало для стрижки трави на ділянці в 650 м 2. І хоча апарат вартістю $ 795 був дуже далекий від сучасних програмованих «розумних» пристроїв, якими можна управляти навіть зі смартфона, ідея позбутися проводів виявилася вельми цікавою і набула логічного розвитку.

Повнорозмірний робот Arok: і з собакою погуляє, і сміття винесе
Який «будинок майбутнього» може обійтися без роботизованою прислуги? Аналогічна думка відвідала і винахідника Бена Скора (Ben Skora), який представив своє бачення футуристичного, враховуючи 70-і роки минулого століття, житла з дистанційно керованими світильниками та іншими технічними нововведеннями. Не обійшлося і без «розумного» обслуговуючого персоналу, місце якого зайняв двометровий робот Arok з відверто моторошною особою.

До завдань механізованого гіганта входили винесення сміття, подача напоїв і навіть вигул вашого чотириногого улюбленця. Звичайно, наявність оператора для маніпулювання пристроєм було обов'язковою умовою. Так що штат прислуги в «будинку майбутнього» передбачав додаткову вакансію для контролю за роботом-помічником.

Популярний в Японії ігровий робот Omnibot: передісторія
Читачі 3DNews добре знайомі з пристроєм під назвою Omnibot. А ось про його прабатьків, який став одним з найбільш компактних роботів свого часу - Omnibot 2000, - відомо набагато менше. Випущений незвичайний апарат був в 1984 році, а представляв він, як і сьогодні, високотехнологічних і передову автономну модель на ринку самих незвичайних іграшок того часу.

Omnibot 2000 мав можливість дистанційного керування, проте розробники передбачили і повністю самостійне переміщення свого дітища по заздалегідь визначеним маршрутом. Всі необхідні для запрограмованого руху дані записувалися на касету, а робота можна було використовувати в якості офіціанта для доставки їжі і напоїв на великій вечірці.

SynPet Newton: одомашнений варіант «зоряного» R2D2
Якщо вам припав до душі милий і видає незвичайні звуки робот R2D2 із саги Джорджа Лукаса (George Lucas) «Зоряні війни», то вам буде цікаво дізнатися, що в проміжок з кінця 80-х по початок 90-х років в продажу знаходився його комерційний аналог - SynPet Newton. Звичайно, даний робот заввишки приблизно 86 см можна назвати точною копією легендарного R2D2, проте схожість в дизайні, як то кажуть, «у наявності».

SynPet Newton міг вільно переміщатися по квартирі, міг похвалитися голосовим управлінням і допомагав впоратися з домашніми справами. За його працездатність відповідав 16-бітний мікропроцесорний чіп, а також широкий набір датчиків для повністю автономного пересування відповідно до обраного режиму. При цьому SynPet Newton міг спілкуватися з мешканцями, використовуючи спеціальний синтезатор голосу, а також забезпечувати зв'язок свого власника із зовнішнім світом за допомогою вбудованого бездротового телефону і модему.
Правда, SynPet Newton могли собі дозволити лише найзаможніші американці, адже ціна на «розумну машину» становила нечувані $ 8000.

Вінець еволюції людиноподібних роботів від інженерів Honda
Мабуть, найвідомішим на сьогодні роботом-гуманоїдом є пристрій компанії Honda, що проходить під назвою ASIMO. Близько десяти років знадобилося інженерам японської компанії, щоб в кінцевому підсумку довести параметри прототипу до поточного межі у вигляді поєднання високої швидкості переміщення, надзвичайною спритності і просунутого взаємодії з людьми.

ASIMO здатний привітно зустрічати гостей рукостисканням і підносити напої не гірше, ніж це б робив справжній офіціант.

iRobot Roomba: відповідальний за чистоту у вашому будинку
Роботи-пилососи не встигли стати поширеним гаджетом в будинках простих користувачів через їх високу вартість. Однак деякі моделі все ж мали комерційний успіх і прижилися в квартирах своїх власників, як це зробив один з перших домашніх механізованих прибиральників - iRobot Roomba. Основним завданням пристрою, яке з'явилося на ринку 12 років тому, є якісна, а головне - повністю автономна чистка найскладніших типів підлогового покриття.

Робот-гуманоїд Reem: і вантажник, і інформаційний центр
Вам часто доводилося пересуватися по будівлі вокзалу або аеропорту з громіздким і важким багажем, а заодно намагатися дізнатися необхідні для посадки на рейс відомості? Схоже, що дана проблема в Іспанії, де влаштувалася фірма PAL Robotics, спонукала команду з чотирьох інженерів зайнятися розробкою робота-носія Reem-A.

Перш розробники вже мали досвід конструювання людиноподібних машин, що беруть на себе роль обслуговуючого персоналу. Це дозволило в 2012 році представити комерційний зразок Reem з функцією телеуправління, який не тільки здатний перевозити на собі вантажі, а й виступити в якості інформаційно-довідкового кіоску.


Згодом пристрій було модернізовано до версії REEM-C - йому повернули обидві ноги, як це було передбачено в модифікаціях з індексом «А» і «B».

Ваш особистий роботизований бармен за $ 2700
Якщо відкинути процедури, які вимагають переміщення в просторі, підйом вантажів і складні механічні маніпуляції, то для чого могло б стати в нагоді невелика стаціонарне роботизовані пристрій? Звичайно для приготування різноманітних коктейлів. Робот Monsieur став прикладом майстерного автоматизованого бармена, який не тільки приготує вам улюблений напій, а й радісно привітає свого власника по поверненню додому. Для цього в конструкторами була передбачена функція визначення вашого перебування в квартирі за допомогою програми для мобільного пристрою, що забезпечує синхронізацію з Monsieur і управління апаратомпо Bluetooth і Wi-Fi.

Система здатна не тільки виконувати замовлення на коктейлі дистанційно зі смартфона або планшета, але і пропонувати вам подвійні порції напоїв в разі, якщо ви затрималися на роботі і у вас був дуже напружений день.
Головною ж особливістю 23-кг ящика з сенсорним дисплеєм стало кількість коктейлів, які він здатний приготувати гостям на вашій вечірці. Апарат включає в себе 12 тематичних варіацій - «безалкогольна вечірка», «спортивний бар», «ірландський паб» та інші, в кожній з яких налічується близько 25 рецептів різних напоїв.

Реалізація проекту роботизованого бармена стала можливою завдяки краудфандінговой платформі Kickstarter, на якій стартап Monsieur зібрав пожертвувань на загальну суму $ 140 тис.

Стартап JIBO: якщо вам самотньо і не з ким поговорити
Робот JIBO, який сподобався відвідувачам майданчики Indiegogo, що принесло творцям пристрої понад $ 2 млн, стане персональним співчуваючим співрозмовником, ввічливим, покірним і підбадьорював слухачем незалежно від вашого поточного емоційного стану.

Так звана соціальна модель поведінки, характерна для JIBO, в сукупності з просунутою апаратної і програмної складової дозволить пристрою знайти індивідуальний підхід при спілкуванні з кожним членом сім'ї. Пристрій здатний самостійно ідентифікувати співрозмовника, а також вловити його настрій, щоб вибрати найбільш підходящий в ситуації, що склалася алгоритм поведінки.

JIBO, володіючи бездротовим доступом в Мережу, по голосовому запитом знайде рецепти різних страв на прийдешній вечерю, проінформує про новий лист на вашій електронній пошті, допоможе з покупками, а також доречно пожартує, розважить веселою історією і скрасить похмурий вечір хорошою музичної композиції.


Обзавестися незвичайним роботизованим іншому зможе практично будь-який бажаючий, адже ціна на JIBO становить всього $ 500.
Роботи на варті порядку
Відмінним способом застосування роботизованих пристроїв стало виконання ними охоронних функцій. І справді: тепловізори, датчики руху, лазерний далекомір, всілякі камери і «розумні» системи в теорії здатні значно раніше виявити порушника, запідозрити недобре і повідомити про загрозу або вже відбувся проникненні на територію, що охороняється, ніж це зробив би навіть досвідчена людина.
І якщо дітище фахівців з Knightscope призначене для пасивного спостереження і відправки сигналу тривоги на диспетчерський пульт, то, наприклад, робот-охоронець PatrolBot Mark II готовий самостійно протидіяти порушнику. Для цього на його колісної платформі встановлено клаксон на 100 дБ і водний пістолет, за допомогою якого оператор може підмочити в прямому сенсі цього слова репутацію і одяг порушника.

У цьому модулі ви дізнаєтеся:
Як використовують роботів в промисловості;
як роботи допомагають дослідити небо, землю і воду;
в якій області роботи ефективніше людини;
ніж робот може допомогти лікарям і медсестрам;
які роботи оточують нас в повсякденності;
чи можуть роботи бути цілком віртуальними.
У цьому відео ментор курсу Микола Пак розповідає, які роботи поширені в промисловості, чому вони припали до двору в науці, які завдання роботи беруть на себе в медицині і як спрощують наше повсякденне життя. У наступних частинах модуля ми детально обговоримо кожну з цих областей.
Коли будете дивитися відео, зверніть увагу:
Який завод Микола наводить як приклад як роботизовані виробництво?
Як називається робот-хірург?
Роботи-робітники
Вантажники, сортувальники і збирачі
Роботи не втомлюються від монотонних завдань, можуть піднімати об'ємні вантажі і працювати швидко, їм не потрібні вихідні та перерви на обід. Не дивно, що самі різні виробництва (від повсякденних товарів до літаків і космічних апаратів) «наймають» роботів з розпростертими обіймами. Нижче ми зібрали найхарактерніші приклади роботів на виробництві.
Маніпулятор - це ті самі роботизовані "руки", які ми бачимо на фотографіях і відео з сучасних фабрик і заводів. Їх постачають різноманітними датчиками, щоб вони могли обробляти і з'єднувати деталі, контролювати якість продукції, упаковувати її і т. Д.
Роботи-сортувальники допомагають звільнити людей від важкого і монотонної праці, який вимагає великої концентрації. Їх сенсори готові 24/7 аналізувати вид деталей і елементів, що лежать на конвеєрі, і розподіляти їх по різних відсіках. Наприклад, сьогодні роботи-сортувальники часто розбирають будівельне сміття, адже щось з нього можна повторно використовувати або переробити.
Роботи-навантажувачі звільняють людей від необхідності переміщати що б там не було - від паперів до об'ємних вантажів. Наприклад, в архіві Ощадбанку потрібні коробки з документами знаходять і переміщують спеціальні роботизовані крани-штабелери. А гіганти інтернет-торгівлі Amazon і Alibaba щосили використовують роботів-комірників, які беруть 70% рутинної роботи на себе і дуже самостійні (наприклад, зможуть зорієнтуватися на складі, якщо там зміниться планування).
Від конкретних завдань до цілої будівництва
У будівництві роботи цінні тим же, чим і в промисловості: вони беруть на себе фізично важкі, небезпечні і монотонні завдання. До того ж їм не страшна негода: темп їх роботи не впаде через похолодання або дощу.

Робот-будівельник - відмінний приклад того, що роботи здатні виконувати одноманітні завдання в рази швидше людей. Так, робот-будівельник від Fastbrick Robotics працює в 20 разів швидше звичайного каменяра і може сам звести фундамент приватного будинку з цегли за два дні. З ним будівельники зможуть зводити по 150 цегляних будинків на рік - їм залишаються комунікації та оздоблювальні роботи.
Робот для прокладки кабелю пробирається по каналах, вже прориті для труб, і тягне за собою телефонний або оптичний кабель. Це означає, що для прокладки кабелю не потрібно нічого копати окремо, можна використовувати готові труби. Більш того, поломки теж виявити простіше: такі роботи можуть досліджувати трубопроводи за допомогою камери і підсвічування.
Робот-екскаватор Brokk зі Швеції може виконувати на будівництві дуже багато завдань: відкопувати, вантажити і переносити предмети, розбирати конструкції із залізобетону, цегли і металу, знімати шари штукатурки зі стін, бурити отвори і т. Д.
У 2019 року в Амстердамі планують встановити міст, цілком виготовлений зі сталі за методом 3D-друку, прямо в повітрі. Два роботи починають будувати міст на різних берегах і просуваються вперед по вже зведеної частини, зустрічаючись на середині вже готового моста. Роботизовані системи надрукують всі деталі моста прямо на місці, їх не доведеться везти. Своєрідні будівельні ліси, а точніше, конструкції, які витримають їх власну вагу, вони теж побудують самі.
Роботи-дослідники
Роботи-дослідники незамінні при вивченні небезпечних для людини локацій і явищ, а також там, де потрібна велика точність або фізична сила. Вони можуть забратися туди, куди людям хід замовлений: глибоко під воду, в жерло вулкана або, навпаки, на рівень органів і навіть окремих клітин живого організму
На землі

Катер. Роботизовані катера досліджують і вивчають річки, озера і моря. Особливо вони корисні в екстремальних умовах - наприклад, в льодах Далекого Півночі. Вони можуть працювати самостійно, а можуть - по командам оператора через дистанційне керування. Якщо управління ведеться через радіохвилі, оператор може знаходитися досить далеко від робота. Навіть на іншому кінці міста середнього розміру.
Батискаф / глайдер. Роботи-батискафи і роботизовані глайдери з різними принципами руху надають нам неоціненну допомогу в дослідженні морських глибин. Людини туди відправляти поки рано: для довгих занурень апарату треба бути великим і дорогим. Та й чи потрібно це, якщо можна зробити робота будь-якої форми з стійких до низьких температур матеріалів, наділити його маніпуляторами, датчиками, забезпечити камерою і досліджувати глибини, не піддаючи людини небезпеки?
Станція. Роботизовані підводні і донні станції ведуть тривале спостереження за екологією і геологією глибин і допомагають відслідковувати екологічну, геологічну, льодову і іншу обстановку на недоступною людині глибині і в невідповідних умовах. Наприклад, глибоководна експедиція в Маріанську западину від Національного управління океанічних і атмосферних досліджень (National Oceanic and Atmospheric Administration, NOAA) виявила безліч нових біологічних видів завдяки роботу з камерою на дистанційному управлінні. Залежно від призначення і акумулятора такі станції можуть працювати від декількох тижнів до декількох років.
Вулкан. На планеті є й інші місця, куди людині не забратися (наприклад, вулкани і гейзери). Побудований з стійких до високих температур і отруйним газам матеріалів робот здатний проводити дослідження навіть в момент пікового сейсмічної активності. НАСА розробило вже два таких робота: один переміщається на колесах, а другий імітує рухи хробака і за рахунок цього може переміщатися по прямовисних крижаних скелях.
У космосі

Curiosity - марсохід третього покоління, який був запущений НАСА в 2011 році, по суті - автономна хімічна лабораторія, яка досліджує грунт і атмосферу Марса.
Роботизовані помічники вже з'явилися на МКС, а скоро роботи будуть виконувати найпростіші рутинні обов'язки космонавтів: наприклад, усувати неполадки з сонячними панелями при відмовах автоматики, яка змінює їхнє становище, або монтувати блоки космічних станцій. Русский сегмент МКС вже сьогодні лагодить космічний маніпулятор ERA. А може бути, астронавтів і зовсім в майбутньому замінять електронні колеги - вже ведуться розробки роботів-космонавтів . І тренувати нікого не треба, і для людей небезпеки немає.
Супутники на орбіті Землі забезпечують нам зв'язок, спостереження за погодою і навігацію. Їх вже сотні, і вони настільки важливі, що ще в 2016 році одне з управлінь Пентагону почало розробляти проект окремого супутника для ремонту супутників - своєрідної швидкої допомоги на висоті 36 тисяч кілометрів. У цих апаратів є власна функція, способи отримувати інформацію про зовнішній світ, алгоритми дій і обладнання, яким вони виконують ці дії, а значить, вони вважаються роботами.
Роботи-помічники в дрібницях
Газонокосарки, валізи і няні
У першому модулі ми говорили про те, як багато роботів вже сьогодні спрощують повсякденне життя людини: робот-пилосос, голосові помічники і навіть пральні машини при уважному розгляді виявилися роботами. У цій частині давайте подивимося, які ще завдання можна автоматизувати.

Робот-прибиральник не такий компактний і симпатичний, як його далекий родич робот-пилосос, зате може працювати в негоду і справлятися з більш серйозними ворогами: дорожнім пилом, листям, снігом і льодом. Залежно від завдань його постачають колесами або гусеницями.
Робот-газонокосарка виглядає як невелика візок на колісному або гусеничному ходу, з електричним або дизельним двигуном. Точно так же, як робот-пилосос, газонокосильщик обходить володіння, виконує завдання і повертається на базу. Межі ділянки позначають кабелем, трохи уритим в землю, а повернутися на базу допомагають інфрачервоні датчики.
Для боротьби з комахами вже теж придуманий робот. Китайські інженери розробили мініатюрний танк, який детекторами виявляє комарів, а потім «розстрілює» їх лазерною гарматою.
Чистити басейн - не дуже захоплююче заняття, а значить, тут теж є простір для автоматизації. Перший тип роботів-чистильників плаває по поверхні і збирає сміття. Другий вміє повзати по стінках і дну точь-в-точь як равлики по акваріуму - і точно так же очищати його від бруду.
Робот-чемодан вміщує від 15 до 30 кг речей і вміє йти за хазяїном, а точніше, за маячком в його кишені. Загубившись, він подасть звуковий сигнал, а датчики допомагають йому не стикатися з людьми і не падати. По сходах він за вами дертися поки не зможе, але для переміщень по аеропорту - це те, що потрібно.
В особистому асистент скоро теж не буде необхідності. У міру розвитку робот-помічник навчиться підтримувати розпорядок дня, шукати інформацію, стежити за погодою і пробками на дорозі, допомагати в домашніх справах. Вони вже вміють багато чого з цього - наприклад, робот Zenbo від ASUS замінює щоденник, управляє «розумним будинком», здатний відповідати на питання, робити фото та відео.
Робот-няня допоможе батькам доглянути за дитиною: камера покаже, що робить малюк, а мікрофон допоможе почути, не плаче він. Через динаміки з дитиною можна спілкуватися, а система дистанційного керування допоможе переміщати робота по дому. Робоняня можна попросити показати дітям картинки і мультики (зрозуміло, ті, які вкаже батько).
Роботи - медичні помічники
Замість скальпеля, медсестри і донора
У медицині на перший план виходять такі якості роботів, як точність, здатність працювати без втоми і відсутність емоцій. Впровадження роботів в медицину має вирішити одразу 2 завдання. По-перше, людині більше не доведеться займатися рутинною роботою, наприклад, видавати медкарти хворих. По-друге, роботи допоможуть лікарям здійснювати високоточні операції, які раніше були неможливі. Робот не засмучується, не допускає помилок і завжди готовий до роботи.

Робот-медсестра. Роботи можуть доглядати за пацієнтами, працювати в реєстратурі, стежити за дотриманням призначеного лікування (наприклад, в якості частини автоматизованої системи з видачі призначених препаратів з аптеки), забирати в процедурному кабінеті і приносити пацієнтам потрібні ліки. Один з таких роботів, створених для догляду за дітьми та літніми пацієнтами, називається Robear - його представили в Японії ще в 2015 році.
Робот-хірург. Робот-хірург сьогодні - підмога в складних операціях, що вимагають тонкої і тривалої роботи. Так, розроблений робот Da Vinci: набір камер і маніпуляторів, який працює під керівництвом оператора-хірурга. Налагодивши дистанційне керування, інженери доб'ються того, що лікаря і пацієнта буде необов'язково зустрічатися особисто навіть для операції, так як хірург виконає всі маніпуляції віддалено. Робот-хірург Versius допомагає лікарям проводити найсучасніший тип операцій, коли вся маніпуляція відбувається через крихітний розріз. Такий метод заподіє пацієнту менше болю і залишає менше шрамів, але вимагає ювелірної точності і цілого набору технологій.
Принтер органів. Це щось на кшталт 3D-принтера, тільки в якості матеріалу для «друку» використовують власні клітини пацієнта. Таким способом вже створюють і успішно пересаджують деякі внутрішні органи, шкіру, частини тіла (вуха та носи), кістки і хрящі. Зовсім скоро пошуки донора органів підуть в минуле - вже відомі випадки успішного друку судин, клапанів серця, шкіри, вирощених в лабораторії.
Робот-діагност. Роботи вже активно допомагають лікарям приймати рішення: лікар вводить дані, система допомагає поставити діагноз або виписати ліки. Наступний крок - суперкомп'ютери, оснащені штучним інтелектом. Так, робот-онколог IBM Watson використовує дані 600 тисяч документів і наукових робіт, щоб за кілька хвилин проаналізувати всі відомості про пацієнта і запропонувати варіанти діагнозу. Важливо, що такі роботи ні в якому разі не замінюють лікаря, вони лише допомагають йому проаналізувати інформацію і пропонують варіанти вирішення. Наприклад, робот не інтерпретує рентгенівський знімок, а тільки показує, що у людей з подібними знімками виявлений деякий діагноз, а далі висновки робить лікар.
Екзоскелет. Пристрій не наукова фантастика, а спосіб відновитися після травми або операції. Екзоскелет ExoAtlet є жорсткий каркас з двигунами і програмою. Він допомагає пацієнтові встати вертикально і рухатися так, як якщо б він йшов сам. Спеціальні датчики зчитують руху тіла і підсилюють їх моторами, так що людина йде як ніби сам, але витрачає набагато менше зусиль.
Роботи-програми
Ми вже говорили про те, що роботи можуть виглядати як завгодно. Прийшов час з'ясувати, що вони можуть і зовсім ніяк не виглядати. Головне - щоб вони виконували свою функцію за заданим алгоритмом, а результат їх роботи був відчутний поза віртуального світу.
робот Віра
Олександр Ураксін з колегами розробили робота Віру, який бере на себе рутинні завдання рекрутерів. Послухайте розповідь Олександра про те, як Віра допомагає «Ростелекому» наймати нових співробітників. Які завдання виконує робот?
Автоматизація роботами
Один з окремих випадків софтверних роботів, тобто роботів, які не мають тіла, - це автоматизація бізнес-процесів за допомогою роботів або штучного інтелекту. Така технологія називається «автоматизація процесів роботами» (від англійського Robotic process automation - RPA). Суть полягає в тому, що програма спочатку відстежує дії користувача, а потім автоматизує ихи починає виконувати самостійно.
Один із прикладів такої автоматизації - робот Віра, з ним ви вже знайомі.
Одна з китайських страхових компаній автоматизувала процес обробки заяв на страхові відшкодування. До автоматизації це була ручна робота: сканування заяв, архівування паперів, занесення даних із заяв в облікові системи для аналізу відповідними підрозділами. У підсумку на кожну заяву в середньому йшло 11 хвилин, а таких заяв за день надходило від 70 до 125. Коли процес автоматизували, залишалося тільки відсканувати документи. Після цього система розпізнавання образів стала «сама» заносити дані в систему і в архів за всіма правилами компанії і законодавства. Весь процес обробки заяв став займати близько півтори хвилини.


Один з фармацевтичних холдингів використовував RPA для аналізу претензій клієнтів. Система автоматично приймає, перевіряє та обробляє претензії клієнтів. За допомогою складного алгоритму робот схвалює або відхиляє заявку, а потім переходить до наступної. У компанію надходить близько 5000 звернень в місяць, і для ручної обробки потрібно 45 операторів. Впровадження, налагодження та тестування робота зайняли півтора місяці, зате після цього той же обсяг заявок може обробити один оператор.
Бути людиною куди простіше, ніж створити людину. Візьміть, наприклад, процес гри в м'яч в дитинстві з одним. Якщо розкласти цю діяльність на окремі біологічні функції, гра перестане бути простою. Вам потрібні датчики, передавачі і ефектори. Вам потрібно розраховувати, як сильно бити по м'ячу, щоб він скоротив дистанцію між вами і вашим компаньйоном. Вам потрібно враховувати сонячні відблиски, швидкість вітру і все, що може відвернути. Потрібно визначити, як обертається м'яч і як потрібно його приймати. І залишається простір для сторонніх сценаріїв: що, якщо м'яч пролетить над головою? Перелетить через паркан? Виб'є вікно сусіда?
Ці питання демонструють деякі з найбільш гострих проблем робототехніки, а також закладають основу для нашого зворотного відліку. Перед вами список з десяти найбільш складних речей, яким потрібно навчити роботів. Цю десятку ми повинні перемогти, якщо коли-небудь хочемо реалізувати обіцянки, зроблені Бредбері, Дикому, Азімовим, Кларком та іншими фантастами, які бачили уявні світи, де машини поводяться як люди.
Прокласти шлях

Пересування з точки А в точку Б здавалося нам простим з дитинства. Ми, люди, робимо це щодня, щогодини. Для робота, однак, навігація - особливо через єдине середовище, яка постійно змінюється, або через середу, яку він раніше не бачив - дуже складна річ. По-перше, робот повинен бути здатний сприймати навколишнє середовище, а також розуміти всі вхідні дані.
Робототехніки вирішують першу проблему, озброюючи свої машини масивом датчиків, сканерів, камер і інших високотехнологічних інструментів, які допомагають роботам оцінити своє оточення. Лазерні сканери стають все більш популярними, хоча їх не можна використовувати у водному середовищі через те, що світло серйозно спотворюється в воді. Технологія сонара здається життєздатною альтернативою для підводних роботів, але в наземних умовах вона куди менш точна. Крім того, «бачити» свій пейзаж роботу допомагає система технічного зору, що складається з набору інтегрованих стереоскопічних камер.
Зібрати дані про навколишнє середовище - це тільки півсправи. Куди більш складним завданням буде обробка цих даних і використання їх для прийняття рішень. Багато розробники керують своїми роботами, використовуючи визначену карту або складаючи її на льоту. В робототехніці це відомо як SLAM - метод одночасної навігації і складання карти. Складання карти тут означає те, як робот перетворює інформацію, отриману датчиками, в певну форму. Навігація же має на увазі те, як робот позиціонує себе щодо карти. На практиці ці два процеси повинні протікати одночасно, в формі «курки і яйця», що здійснимо тільки при використанні потужних комп'ютерів і просунутих алгоритмів, що обчислюють положення на основі ймовірностей.
продемонструвати спритність

Роботи збирають упаковки і деталі на заводах і складах вже багато років. Але в таких ситуаціях вони, як правило, не зустрічаються з людьми і практично завжди працюють з однаковими за формою об'єктами в щодо вільної середовищі. Життя такого робота на заводі нудна і пересічна. Якщо ж робот хоче працювати на дому або в лікарні, для цього йому знадобиться володіти просунутим дотиком, здатністю виявляти людей поблизу і бездоганний смак в плані вибору дій.
Цим навичкам робота вкрай складно навчити. Зазвичай вчені взагалі не навчають роботів дотиків, програмуючи їх на провал, якщо вони вступають в контакт з іншим об'єктом. Однак за останні п'ять років або близько того були досягнуті значні успіхи в поєднанні піддатливих роботів і штучної шкіри. Податливість відноситься до рівня гнучкості робота. Гнучкі машини більш податливі, жорсткі - менш.
У 2013 році дослідники з Georgia Tech створили роботизований маніпулятор з пружинними суглобами, які дозволяють маніпулятору згинатися і взаємодіяти з предметами, подібно людській руці. Потім вони покрили все це «шкірою», здатної розпізнавати тиск або дотик. Деякі види шкіри роботів містять шестигранні мікросхеми, кожна з яких оснащена інфрачервоним сенсором, який реєструє будь-яке наближення ближче ніж на сантиметр. Інші оснащуються електронними «відбитками пальців» - ребристою і шорсткою поверхнею, яка поліпшує зчеплення і полегшує обробку сигналу.
Об'єднайте ці високотехнологічні маніпулятори з просунутою системою зору - і ви отримаєте робота, який може зробити ніжний масаж або перебрати папку з документами, вибравши потрібний з величезної колекції.
Підтримати розмову

Алан Тьюринг, один із засновників комп'ютерної науки, зробив в 1950 році сміливий прогноз: одного разу машини зможуть говорити так вільно, що ви не зможете відрізнити їх від людей. На жаль, поки роботи (і навіть Siri) не виправдали очікувань Тьюринга. Все тому, що розпізнавання мови значно відрізняється від обробки природної мови - то, що роблять наші мізки, витягуючи сенс з слів і пропозицій в процесі бесіди.
Спочатку вчені думали, що повторити це буде так само просто, як підключити правила граматики до пам'яті машини. Але спроба запрограмувати граматичні приклади для кожного окремого мови попросту провалилася. Навіть визначити значення окремих слів виявилося досить складно (адже є таке явище, як омоніми - ключ від дверей і ключ скрипковий, наприклад). Люди навчилися визначати значення цих слів в контексті, спираючись на свої розумові здібності, розвинені за багато років еволюції, але розбити їх знову на суворі правила, які можна покласти на код, виявилося просто неможливо.
В результаті багато роботи сьогодні обробляють мову, грунтуючись на статистиці. Вчені згодовують їм величезні тексти, відомі як корпуси, а потім дозволяють комп'ютерам розбивати довгі тексти на шматки, щоб з'ясувати, які слова часто йдуть разом і в якому порядку. Це дозволяє роботу «вчити» мову, грунтуючись на статистичному аналізі.
навчитися новому

Уявімо, що хтось, хто ніколи не грав в гольф, вирішив навчитися розмахувати ключкою. Він може прочитати книгу про це, а потім спробувати або ж спостерігати за тим, як практикується відомий гольфіст, і потім спробувати самостійно. У будь-якому випадку освоїти ази можна буде просто і швидко.
Робототехніки стикаються з певними проблемами, коли намагаються побудувати автономну машину, здатну навчатися новим навичкам. Один з підходів, як у випадку з гольфом, полягає в тому, щоб розбити активність на точні кроки, а потім запрограмувати їх в мозку робота. Це передбачає, що кожен аспект активності потрібно розділити, описати і закодувати, що не завжди-то й легко зробити. Існують певні аспекти в розмахуванні ключкою для гольфу, які і словами-то складно описати. Наприклад, взаємодія зап'ястя і ліктя. Ці тонкі деталі легше показати, ніж описати.
За останні роки вчені домоглися певного успіху в навчанні роботів імітувати людини-оператора. Вони називають це імітаційним навчанням, або навчанням по демонстрації (методика LfD). Як вони це роблять? Озброюють машини масивами ширококутних і масштабуючих камер. Це обладнання дозволяє роботу «бачити» вчителя, що виконує певні активні процеси. Навчальні алгоритми обробляють ці дані для створення математичної карти функцій, яка об'єднує візуальний введення і бажані дії. Звичайно, роботи LfD повинні вміти ігнорувати певні аспекти поведінки свого вчителя - на кшталт свербежу або нежиті - і справлятися зі схожими проблемами, які народжуються з-за різниці в анатомії робота і людини.
обманювати

Цікаве мистецтво обману розвивалося ще у тварин, щоб обійти конкурентів і не бути з'їденим хижаками. На практиці обман як мистецтво виживання може бути вельми і вельми ефективним механізмом самозбереження.
Роботам же навчитися обманювати людей або інших роботів може бути неймовірно складно (і, можливо, добре для нас з вами). Обман вимагає наявності уяви - здатності формувати ідеї або образи зовнішніх об'єктів, не пов'язаних з почуттями - а у машини його, як правило, немає. Вони сильні в прямій обробці даних з датчиків, камер і сканерів, але не можуть формувати концепції, які виходять за межі сенсорних даних.
З іншого боку, роботи майбутнього можуть краще розбиратися в обмані. Вчені Georgia Tech змогли передати деякі навички обману білок роботам в лабораторії. Спочатку вони вивчали хитрих гризунів, які захищають свої схованки з їжею, заманюючи конкурентів в старі і невикористовувані сховища. Потім закодували це поведінка в прості правила і завантажили в мізки своїх роботів. Машини змогли використати ці алгоритми для визначення, коли обман може бути корисним в конкретній ситуації. Отже, могли обдурити свого компаньйона, заманивши його в інше місце, в якому немає нічого цінного.
Передбачати дії людини

У «Джетсонів» робот-покоївка Розі була в змозі підтримувати бесіду, готувати їжу, прибирати і допомагати Джорджу, Джейну, Джуді і Елрою. Щоб зрозуміти якість збірки Розі, досить згадати один з початкових епізодів: містер Спейслі, бос Джорджа, приходить в будинок Джетсонів на вечерю. Після трапези він виймає сигару і поміщає її в рот, а Розі кидається вперед з запальничкою. Це проста дія являє собою складну поведінку людини - вміння передбачати, що буде далі, на основі того, що тільки що відбулося.
Як і обман, передбачення людських дій вимагає від робота уявлення майбутнього стану. Він повинен бути в змозі сказати: «Якщо я бачу, що людина робить А, значить, як я можу припустити на основі минулого досвіду, швидше за все, він зробить Б». В робототехніці цей пункт був вкрай складним, але люди роблять певний прогрес. Команда Корнельського університету розробила автономного робота, який міг реагувати на основі того, як компаньйон взаємодіє з об'єктами навколишнього середовища. Для цього він використовує пару 3D-камер, щоб отримати зображення оточення. Потім алгоритм визначає ключові об'єкти в кімнаті і виділяє їх на тлі інших. Потім, використовуючи величезну кількість інформації, отриманої в результаті попередніх тренувань, робот виробляє набір певних очікувань рухів від персони і об'єктів, які вона чіпає. Робот робить висновки щодо того, що буде далі, і діє відповідно.
Іноді Корнельському роботи помиляються, але досить впевнено просуваються вперед, в тому числі і в міру того, як поліпшуються технології камер.
Координувати діяльність з іншими роботами

Будівництво єдиної великомасштабної машини - навіть андроїда, якщо хочете - вимагає серйозних вкладень часу, енергії та грошей. Інший підхід передбачає розгортання армії з простіших роботів, які можуть діяти разом для досягнення складних задач.
Виникає ряд проблем. Робот, що працює в команді, повинен вміти добре себе позиціонувати в зв'язку з товаришами і бути в змозі ефективно спілкуватися - з іншими машинами і оператором-людиною. Для вирішення цих проблем вчені звернулися до світу комах, які використовують складне ройовий поведінку для пошуку їжі і вирішують завдання, які приносять користь всієї колонії. Наприклад, вивчаючи мурах, вчені зрозуміли, що окремі особини використовують феромони для зв'язку один з одним.
Роботи можуть використовувати цю ж «феромоновими логіку», тільки покладатися на світло, а не на хімічні речовини, при спілкуванні. Працює це так: група крихітних роботів розосереджена в обмеженому просторі. Спочатку вони досліджують цю область випадковим чином, поки один не натикається на світловий слід, залишений іншим ботом. Він знає, що потрібно йти по сліду, і йде, залишаючи свій слід. У міру того як сліди зливаються в один, все більше і більше роботів слідують один за одним за одним.
самокопіюватися

Господь сказав Адаму і Єві: «Плодіться і розмножуйтеся, і наповнюйте землю». Робот, який отримав би таку команду, відчув би збентеження або розчарування. Чому? Тому що він не здатний розмножуватися. Одна справа побудувати робота, але зовсім інше - створити робота, який зможе робити копії самого себе або регенерувати втрачені або пошкоджені компоненти.
Що примітно, роботи можуть і не брати людей за приклад репродуктивної моделі. Можливо, ви помітили, що ми не ділимося на дві однакові частини. Найпростіші, однак, роблять це постійно. Родичі медуз - гідри - практикують форму безстатевого розмноження, відому як бутонізації: невелику кульку відділяється від тіла батька, а потім відривається, щоб стати новим, генетично ідентичним індивідуумом.
Вчені працюють над роботами, які зможуть виконувати таку ж просту процедуру клонування. Багато з цих роботів побудовані з повторюваних елементів, як правило кубів, які зроблені за образом і подобою одного куба, а також містять програму самореплікаціі. У кубиків є магніти на поверхні, тому вони можуть приєднуватися і від'єднуватися від інших кубів поблизу. Кожен кубик ділиться на дві частини по діагоналі, тому кожна половина може існувати незалежно. Весь же робот містить кілька кубиків, зібраних в певну фігуру.
Діяти з принципу

Коли ми щодня спілкуємося з людьми, ми приймаємо сотні рішень. У кожному з них ми зважуємо кожен наш вибір, визначаючи, що є добре, а що є погано, чесно і нечесно. Якби роботи хотіли бути схожі на нас, їм потрібно було б зрозуміти етику.
Але як і в випадку з мовою, закодувати етичну поведінку вкрай складно головним чином тому, що єдиного набору загальноприйнятих етичних принципів не існує. У різних країнах існують різні правила поведінки і різні системи законів. Навіть в окремих культурах регіональні відмінності можуть вплинути на те, як люди оцінюють і вимірюють свої дії і дії оточуючих. Спроба написати глобальну і відповідну всім роботам етику виявляється практично неможливою.
Саме тому вчені вирішили створювати роботів, обмежуючи масштаби етичної проблеми. Наприклад, якщо машина буде працювати в певному середовищі - на кухні, скажімо, чи в палаті пацієнта - у неї буде набагато менше правил поведінки і менше законів для ухвалення етично обґрунтованих рішень. Для досягнення цієї мети інженери-робототехніки вводять заснований на етиці вибір в алгоритм навчання машини. Вибір цей грунтується на трьох гнучких умовах: до чого хорошого призведе дія, якої шкоди воно завдасть і міру справедливості. Використовуючи цей тип штучного інтелекту, ваш майбутній домашній робот зможе точно визначити, хто в родині повинен мити посуд, а кому дістанеться пульт від телевізора на ніч.
відчувати емоції

«Ось мій секрет, він дуже простий: пильно одне лише серце. Найголовнішого очима не побачиш ».
Якщо це зауваження Лиса з «Маленького принца» Антуана де Сент-Екзюпері вірно, то роботи не побачать самого прекрасного і кращого в цьому світі. Зрештою, вони відмінно зондують світ навколо, але не можуть перетворювати сенсорні дані в конкретні емоції. Вони не можуть побачити усмішку коханої людини і відчути радість, або ж зафіксувати гнівну гримасу незнайомця і затремтіти від страху.
Саме це, більше ніж будь-що інше в нашому списку, відокремлює людини від машини. Як навчити робота закохуватися? Як запрограмувати розчарування, відраза, подив або жалість? Чи варто взагалі намагатися?
Деякі думають, що варто. Вони вважають, що роботи майбутнього будуть поєднувати когнітивні й емоційні системи, а значить, краще працювати, швидше вчитися і ефективніше взаємодіяти з людьми. Вірте чи ні, прототипи таких роботів вже існують, і вони можуть висловлювати обмежений діапазон людських емоцій. Nao, робот, розроблений європейськими вченими, має емоційними якостями однорічної дитини. Він може виражати щастя, злість, страх і гордість, супроводжуючи емоції жестами. І це тільки початок.
Гру 24, 2017 Генадій
Source: nauka.boltai.com
У дитинстві я дивився "Зоряні війни", Бачив роботів C3Po і R2D2 і мріяв про свій власний роботі. Це бажання зміцніло ще більше, коли я побачив у «Джетсонів» сімейного робота-домробітницю Розі, яка безвідмовно працювала займаючись господарством. Я завжди відчував, що персональний робот може стати в нагоді в якості власного шеф-кухаря, тренера і товариша. Схоже, що майбутнє прийшло в наше життя, адже тепер все більш просунуті моделі роботів для будинку з'являються на ринку і коштують навіть дешевше, ніж iPhone або MacBook. Давайте розглянемо 12 персональних роботів для будинку: деякі з них більше схожі на людей, інші менше, але всі вони можуть зробити ваше життя краще.

Pepper відSoftBank Robotics
Pepper - один з лінійки роботів, найбільше схожих на людину. Кажуть, що цей робот здатний розпізнавати людські емоції. Pepper визначає ваші емоції і реагує на них відповідним настроєм. Сьогодні робота Pepper використовують в різних комерційних цілях в Японії, але він також може стати відмінним другом будинку.

Jibo
Jibo - милий маленький робот, який нагадує мені робота Валл-І з однойменного фільму компанії Pixar. Він не пересувається самостійно, але цей сімейний робот навчається у всіх, хто з ним спілкується - і запам'ятовує все те, чим ви з ним діліться. Jibo заговорить з вами, коли ви наступного разу ввійдете в кімнату, і не дивуйтеся, якщо він відпустить жарт.

Kuri відMayfield Robotics
Kuri - це веселий друг і хороший помічник з серйозним технологічним вмістом. Робот мобільний, оснащений WiFi, Bluetooth, камерою 1080p і функцією розпізнавання осіб. Також він має можливість телеприсутності, що дозволяє розмовляти через робота з іншими людьми вдома. Він може переміщатися по будинку, об'їжджаючи перешкоди і домашніх тварин, і додатково виконувати роль домашньої системи спостереження, оскільки він чує і бачить все, що відбувається в будинку. Kuri видає піку звукові сигнали, схожі на R2D2 з «Зоряних воєн». Kuri може щодня фотографувати і зберігати контент в додатку на вашому телефоні - де ви зможете цей контент переглядати, редагувати і відправляти друзям.

Zenbo відAsus
Zenbo - розумний мобільний робот, який може спілкуватися, допомагати і розважати вас тоді, коли це необхідно. Поки ви вдома, Zenbo вчиться і адаптується до вас, а коли знадобиться - ділиться своїми емоціями. Zenbo може допомагати з нагадуваннями, управляти домашніми пристроями, працювати під час вашої відсутності в якості системи безпеки і навіть розважати дітей, читаючи їм казки.

Lynx відUbtech
Lynx - це робот-гуманоїд, який забезпечує мобільність голосовому помічнику Alexa. Lynx може замовити необхідні товари безпосередньо з сайту Amazon за допомогою простих голосових команд. Lynx оснащений функцією розпізнавання осіб і персоналізованими привітаннями. Він може програвати музику і забезпечувати безпеку під час вашої відсутності транслюючи те, що відбувається в будинку.

Budgee від 5Elements Robotics
Шукаєте ще одну пару рук, яка допоможе вам носити щось по дому або у дворі? Тоді вам потрібен Budgee. Budgee - це доброзичливий, працьовитий робот, який допомагає переносити речі.

Hub Robot відLG
Hub Robot від LG - це розумний домашній помічник, керований голосовим сервісом Alexa. З його допомогою ваш будинок можна зробити розумніше, просто встановивши робота на найактивнішу місце у вашому домі. Робот реагує на ваші рухи кивками і простими відповідями. Він може подбати про все: від створення настрою і відтворення музики до включення і відключення кондиціонера. На інтерактивному дисплеї відображаються повідомлення, відео та фотографії. Використовуючи функцію розпізнавання осіб, Hub Robot може дізнаватися членів сім'ї. В даний час даного робота поки немає в продажу, але ми сподіваємося, що він скоро з'явиться, оскільки в січні 2017 року його вперше продемонстрували на виставці споживчої електроніки.

Olly Robot відEmotech
Робот Olly є міксом розумного домашнього хаба і персонального робота. Це кругле настільний пристрій призначений для того, щоб зробити ваш день краще. Olly - це робот-стартап з Лондона, який дізнається, як вам хотілося б спілкуватися, а потім відповідає на ваші питання і контролює підключення пристрою.

Robo Temi
Temi - це персональний робот для будинку: він розумніший, ніж робот з функцією телеприсутності, тому може взяти на себе роль особистого помічника на колесах. Temi був розроблений в якості відеочату і музичної машини - щоб ви розважалися і залишалися на зв'язку. Temi працює на операційній системі Android, тому він сумісний з багатьма вашими улюбленими додатками.

Aido відIngen Dynamic
Aido - це сімейний домашній робот, який може пересуватися по будинку, допомагати і покращувати ваше життя. Aido може робити все: починаючи з ігор з вашими дітьми і закінчуючи допомогою по дому, справляючись з усім запланованим. Aido може підтримувати зв'язок і безпеку в будинку завдяки мобільним і візуальним можливостям.

Personal Robot відRobot Base
Цей креативно названий робот вміє багато. Як ми вже говорили раніше, Personal Robot оснащений всіма основними функціями, такими як: розпізнавання осіб, можливість фотографування, будильник, точне розпізнавання мов і автономна навігація. Крім того, він може створити карту вашого будинку за допомогою навігаційних і картографічних алгоритмів. Personal Robot вміє також взаємодіяти з іншими домашніми пристроями, такими як розумний термостат Nest і інші, тому допоможе автоматизувати ваш будинок.

Персональний роботQ. Bo з відкритим вихідним кодом
Шукаєте 2 в 1: і персонального робота, і робота для експериментів? Знайомтеся з Q.Bo - роботом з відкритим вихідним кодом, який дозволяє додати необхідні функції, і, таким чином, створити найбільш персоналізіруемого робота. Q.Bo оснащений базовими функціями і технічними можливостями, але їх можна розширювати. Цей робот відмінно підходить дітям, батькам і педагогам - адже з нього можна вигадати і налаштувати такого персонального робота, якого захочеться.
БОНУС

Erica - японський робот на базі Android
Цей робот поки не проводиться для масової аудиторії, я просто подумав, що його варто включити в список, щоб продемонструвати напрямок, в якому рухаються роботи. Erica нагадує мені поганого робота з серіалу «Світ Дикого Заходу». Цілком можливо, що скоро роботи будуть більш схожими на людину, як Еріка, і навіть зможуть працювати серед нас, а може бути, вони вже серед нас - далі йде зловісна музика.
Ми все ще перебуваємо на початку ери штучного інтелекту і персональних роботів для будинку. Я впевнений, що ця група роботів, які в даний час виглядають як нова веб-сторінка HTML під час Інтернет-революції, буде витіснена більш просунутими засобами. Проте, захоплююче спостерігати за тим, як все рухається в бік майбутнього - в сторону того, що ми бачили на великих екранах, і чого з нетерпінням чекали протягом останніх декількох десятиліть.
 Як оплатити доменне ім'я
Як оплатити доменне ім'я Доменна зона островів Токелау
Доменна зона островів Токелау Що таке домен Які можуть бути проблеми
Що таке домен Які можуть бути проблеми Yandex Wordstat: докладна інструкція по використанню сервісу та операторів «Угруповання» і ускладнений запит
Yandex Wordstat: докладна інструкція по використанню сервісу та операторів «Угруповання» і ускладнений запит Редагування dbf файлів
Редагування dbf файлів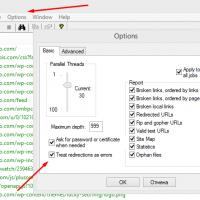 Xenu Link Sleuth - що це таке за програма Як користуватися програмою Xenu
Xenu Link Sleuth - що це таке за програма Як користуватися програмою Xenu Способи скопіювати і вставити текст з клавіатури не використовуючи миша
Способи скопіювати і вставити текст з клавіатури не використовуючи миша